一种工件批量翻转机构
1.本实用新型涉及翻转机构的技术领域,特别是涉及一种工件批量翻转机构。
背景技术:
2.在工厂生产作业中,经常遇到对产品上下二个面进行加工的工艺,如在产品上下表面激光镭射二维码、喷码等。常规的操作方法是人工进行翻转,或者设备对人工有伤害时采用机械手翻转,人工翻转操作效率低,容易疲劳出错,安全性低、存在安全隐患(割伤、夹伤等),且人工成本高昂,对工件质量也有影响,如对光洁度要求较高的零件表面,触碰后会污染工件;而机械手操作则需要空间安装、占地大且费用昂贵。
技术实现要素:
3.本实用新型的目的是提供一种工件批量翻转机构,以解决上述现有技术存在的问题,使工件能够实现批量化翻转,提高操作效率。
4.为实现上述目的,本实用新型提供了如下方案:
5.本实用新型提供了一种工件批量翻转机构,包括升降机构和翻转机构,所述升降机构上设置有所述翻转机构,所述升降机构能够带动所述翻转机构升降移动,所述翻转机构上设置有若干个夹爪,所述翻转机构能够带动所述夹爪翻转180
°
,所述夹爪用于抓取工件。
6.优选的,所述升降机构包括基座、滚珠丝杠机构和直线导轨,所述基座上竖直设置有所述滚珠丝杠机构和所述直线导轨,所述滚珠丝杠机构的丝杠与所述直线导轨平行设置。
7.优选的,所述滚珠丝杠机构包括电机、滚珠丝杠、滑座,所述滚珠丝杠的两端分别通过一安装座连接于所述基座上,所述滚珠丝杠的上端连接所述电机、中部连接所述滑座的一端,所述滑座的另一端滑动设置于所述直线导轨上,所述滑座上设置有所述翻转机构。
8.优选的,所述电机为伺服电机,所述电机通过联轴器连接所述滚珠丝杠。
9.优选的,所述翻转机构包括翻转电机、带轮传动机构、翻转座和夹爪,所述翻转电机通过带轮传动机构连接所述翻转座,所述翻转电机设置于所述滑座上,所述翻转座上并排设置有若干个所述夹爪。
10.优选的,所述翻转电机为伺服电机,所述夹爪为气动夹爪。
11.优选的,所述气动夹爪通过连接座设置于所述滑座上,所述气动夹爪的夹爪上均连接有延长件。
12.优选的,所述翻转座包括转轴、旋转座、支撑座和轴承,所述旋转座的一端面连接所述转轴、另一端面连接所述夹爪,u型的所述支撑座固定于所述滑座上,所述转轴贯穿所述支撑座且与所述支撑座之间设置有所述轴承,所述转轴的末端连接有带轮。
13.优选的,所述轴承为角接触球轴承。
14.优选的,所述带轮传动机构包括同步带和两个带轮,两个所述带轮上绕设有所述
同步带,两个所述带轮分别连接于所述翻转电机的输出轴和所述转轴上。
15.本实用新型相对于现有技术取得了以下技术效果:
16.本实用新型结构简单,制造方便,成本低,维护费用小;整个机构占用空间小,安装方便;可以实现同时翻转多个产品,效率高;适用性强,既能放置到单机设备中,也能架设到流水线作业上。
附图说明
17.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
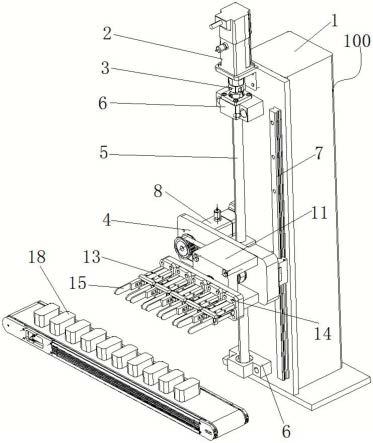
18.图1为本实用新型工件批量翻转机构的结构示意图;
19.图2为本实用新型中升降机构的结构示意图;
20.图3为本实用新型中翻转机构的结构示意图一;
21.图4为本实用新型中翻转机构的结构示意图二;
22.其中:1-基座,2-电机,3-联轴器,4-滑座,5-滚珠丝杠,6-安装座,7-直线导轨,8-翻转电机,9-转轴,10-旋转座,11-支撑座,12-轴承,13-气动夹爪,14-连接座,15-延长件,16-同步带,17-带轮,18-工件,100-工件批量翻转机构。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.本实用新型的目的是提供一种工件批量翻转机构,以解决现有技术存在的问题,使工件能够实现批量化翻转,提高操作效率。
25.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
26.如图1至图4所示:本实施例提供了一种工件批量翻转机构100,包括升降机构和翻转机构,升降机构上设置有翻转机构,升降机构能够带动翻转机构升降移动,翻转机构上设置有若干个夹爪,翻转机构能够带动夹爪翻转180
°
,夹爪用于抓取工件18。
27.具体的,升降机构包括基座1、滚珠丝杠机构和直线导轨7,基座1上竖直设置有滚珠丝杠机构和直线导轨7,滚珠丝杠机构的丝杠与直线导轨7平行设置,对滑座4起导向作用。滚珠丝杠机构包括电机2、滚珠丝杠5、滑座4,滚珠丝杠5的两端分别通过一安装座6连接于基座1上,滚珠丝杠5下端的安装座6为浮动支撑座,内设有角接触球轴承,滚珠丝杠5的上端连接电机2、中部连接滑座4的一端,滑座4的另一端滑动设置于直线导轨7上,滑座4上设置有翻转机构。电机2为伺服电机,电机2通过联轴器3连接滚珠丝杠5。
28.具体的,翻转机构包括翻转电机8、带轮传动机构、翻转座和夹爪,翻转电机8通过带轮传动机构连接翻转座,翻转电机8设置于滑座4上,翻转座上并排设置有若干个夹爪,本
实施例中设置有五个夹爪。翻转电机8为伺服电机,夹爪为气动夹爪13,便于接入控制系统,实现自动化控制。气动夹爪13通过连接座14设置于滑座4上,气动夹爪13的夹爪上均连接有延长件15,避让加工空间,同时便于夹持工件18。翻转座包括转轴9、旋转座10、支撑座11和轴承12,旋转座10的一端面连接转轴9、另一端面连接夹爪,u型的支撑座11固定于滑座4上,转轴9贯穿支撑座11的底面且与支撑座11之间设置有轴承12,转轴9的末端连接有带轮17。轴承12为角接触球轴承,精度高,刚性好,温升低,转速高,装拆方便。带轮传动机构包括同步带16和两个带轮17,两个带轮17上绕设有同步带16,两个带轮17分别连接于翻转电机8的输出轴和转轴9上。翻转机构采用同步带16传动,柔性好,结构小巧,且安装方便,同步带16和带轮17都为标准件,采购方便成本低。
29.本实施例的工件批量翻转机构100使用时,工件18通过皮带输送线等间距输送,行走到设定的翻转加工工位,先对一批工件18上表面进行加工(如表面打标),然后升降机构沿z轴下降,行走到预定位置,使气动夹爪13刚好夹紧工件18,之后工件18由升降机构带动上升,行走约200mm,翻转机构的伺服电机旋转180
°
,通过带轮传动机构带动旋转座10上的工件18旋转180
°
,完成工件18翻转。然后升降机构沿z轴下降,行走到预定位置,气动夹爪13松开产品,升降机构返回初始位置,对该批工件18进行下表面加工。工件18的上下表面均加工完成后,流水线启动,流走该批工件18同时输送下一批未加工的工件18,往复循环,操作简单快捷。整个机构占用空间小,安装方便;可以实现同时翻转多个产品,效率高;适用性强,既能放置到单机设备中使用,也能架设到流水线上进行作业。
30.本说明书中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1