落地式抗扭机械臂的制作方法
本技术涉及机械臂领域,特别是涉及落地式抗扭机械臂。
背景技术:
1、机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。拧紧机是一种电动扳手工具,生产装配作业过程中应用伺服拧紧机可以降低员工的劳动强度。
2、电动拧紧机再拧紧过程中会产生很大反作用力,人力无法控制,这种情况下就需要抗扭臂来抵消拧紧机工作时的反作用力。抗扭机械臂的臂展较长时移动时阻力很大,导致操作不方便,为改善这一问题,因此提出一种落地式抗扭机械臂。
技术实现思路
1、为了克服现有技术的不足,本实用新型提供落地式抗扭机械臂,产生了降低拧紧机工作产生的反作用力的技术效果。
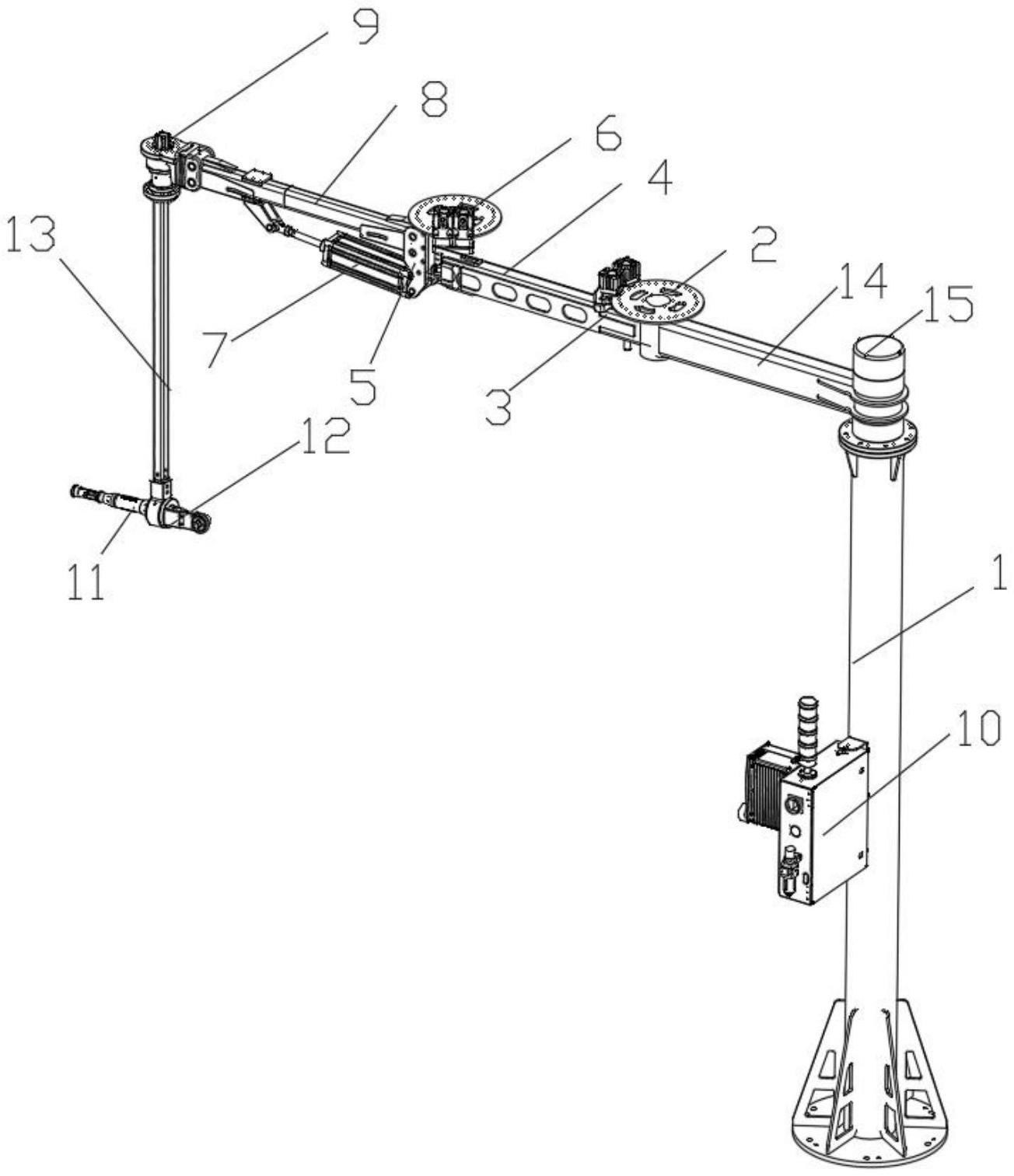
2、为解决上述技术问题,本实用新型提供如下技术方案:落地式抗扭机械臂,包括立柱回旋座,所述立柱回旋座顶部安装有电动旋转臂,所述电动旋转臂顶部安装有驱动电机,所述电动旋转臂末端安装有后臂刹车盘,所述后臂刹车盘底部安装有气动碟式刹车,所述气动碟式刹车内侧安装有后旋转臂,所述后旋转臂顶部安装有前臂刹车盘,所述前臂刹车盘底部安装有前机械臂,所述前机械臂底部安装有驱动气缸,所述驱动气缸末端安装有前臂旋转关节,所述前机械臂末端安装有气动齿型离合器,所述气动齿型离合器底部安装有辅助臂,所述辅助臂底部安装有辅助手柄,所述辅助手柄的末端安装有工具适配器,以及所述立柱回旋座侧面设置有电控箱。
3、作为本实用新型的一种优选技术方案,所述立柱回旋座固定安装在地面上,所述电动旋转臂一端与立柱回旋座活动连接,并且另一端与后旋转臂的一端活动连接,以及所述驱动电机的输出端与电动旋转臂的末端固定连接。
4、作为本实用新型的一种优选技术方案,所述后臂刹车盘固定安装在电动旋转臂的顶部,并与后旋转臂活动连接,所述气动碟式刹车与后旋转臂固定安装。
5、作为本实用新型的一种优选技术方案,所述前臂旋转关节与后旋转臂固定连接,并且与前机械臂活动连接。
6、作为本实用新型的一种优选技术方案,所述前臂刹车盘与前机械臂活动连接,以及所述驱动气缸一端与前臂旋转关节的侧面活动连接,另一端与前机械臂底部的连杆活动连接。
7、作为本实用新型的一种优选技术方案,所述辅助手柄穿过辅助臂底部的圆孔形卡槽,并于辅助臂的底部固定安装,所述工具适配器侧面设置有安装工具用的接口,以及所述电控箱内部设置有电控附件。
8、与现有技术相比,本实用新型能达到的有益效果是:
9、1、本实用新型通过后臂刹车盘和气动碟式刹车对后旋转臂的旋转状态进行制动,通过后旋转臂对前机械臂进行支撑,通过前臂旋转关节支撑前机械臂旋转,通过前臂刹车盘对前机械臂进行制动,并且通过驱动气缸气动控制前机械臂升降,以及前机械臂内部设置为四连杆机构,用于保证工具适配器始终垂直升降,气动齿型离合器通过拧紧抵消机械臂移动时产生的较大的反作用力,从而达到降低拧紧机工作产生的反作用力的技术效果;
10、2、本实用新型通过立柱回旋座固定机械臂及支撑抗扭机械臂,通过电动旋转臂连接后旋转臂和立柱回旋座,并通过驱动电机驱动电动旋转臂旋转,通过辅助臂固定工具适配器,通过工具适配器固定拧紧工具,通过辅助手柄手动操作机械臂,以及通过电控箱控制设备动作,通过电助力驱动旋转臂,从而达到减少操作力,降低劳动强度,提高使用效率的技术效果。
技术特征:
1.落地式抗扭机械臂,包括立柱回旋座(1),其特征在于:所述立柱回旋座(1)顶部安装有电动旋转臂(14),所述电动旋转臂(14)顶部安装有驱动电机(15),所述电动旋转臂(14)末端安装有后臂刹车盘(2),所述后臂刹车盘(2)底部安装有气动碟式刹车(3),所述气动碟式刹车(3)内侧安装有后旋转臂(4),所述后旋转臂(4)顶部安装有前臂刹车盘(6),所述前臂刹车盘(6)底部安装有前机械臂(8),所述前机械臂(8)底部安装有驱动气缸(7),所述驱动气缸(7)末端安装有前臂旋转关节(5),所述前机械臂(8)末端安装有气动齿型离合器(9),所述气动齿型离合器(9)底部安装有辅助臂(13),所述辅助臂(13)底部安装有辅助手柄(11),所述辅助手柄(11)的末端安装有工具适配器(12),以及所述立柱回旋座(1)侧面设置有电控箱(10)。
2.根据权利要求1所述的落地式抗扭机械臂,其特征在于:所述立柱回旋座(1)固定安装在地面上,所述电动旋转臂(14)一端与立柱回旋座(1)活动连接,并且另一端与后旋转臂(4)的一端活动连接,以及所述驱动电机(15)的输出端与电动旋转臂(14)的末端固定连接。
3.根据权利要求1所述的落地式抗扭机械臂,其特征在于:所述后臂刹车盘(2)固定安装在电动旋转臂(14)的顶部,并与后旋转臂(4)活动连接,所述气动碟式刹车(3)与后旋转臂(4)固定安装。
4.根据权利要求1所述的落地式抗扭机械臂,其特征在于:所述前臂旋转关节(5)与后旋转臂(4)固定连接,并且与前机械臂(8)活动连接。
5.根据权利要求1所述的落地式抗扭机械臂,其特征在于:所述前臂刹车盘(6)与前机械臂(8)活动连接,以及所述驱动气缸(7)一端与前臂旋转关节(5)的侧面活动连接,另一端与前机械臂(8)底部的连杆活动连接。
6.根据权利要求1所述的落地式抗扭机械臂,其特征在于:所述辅助手柄(11)穿过辅助臂(13)底部的圆孔形卡槽,并于辅助臂(13)的底部固定安装,所述工具适配器(12)侧面设置有安装工具用的接口,以及所述电控箱(10)内部设置有电控附件。
技术总结
本技术公开了落地式抗扭机械臂,包括立柱回旋座,电动旋转臂,驱动电机,后臂刹车盘,气动碟式刹车,后旋转臂,前臂刹车盘,前机械臂,驱动气缸,前臂旋转关节,气动齿型离合器,辅助臂,辅助手柄,工具适配器,以及电控箱;通过后臂刹车盘和气动碟式刹车对后旋转臂的旋转状态进行制动,通过后旋转臂对前机械臂进行支撑,通过前臂旋转关节支撑前机械臂旋转,通过前臂刹车盘对前机械臂进行制动,通过驱动气缸气动控制前机械臂升降,以及前机械臂内部设置为四连杆机构,用于保证工具适配器始终垂直升降,气动齿型离合器通过拧紧抵消机械臂移动时产生的较大的反作用力,从而达到降低拧紧机工作产生的反作用力的技术效果。
技术研发人员:陈长虹,温烨博,张翼
受保护的技术使用者:上海世普机械设备有限公司
技术研发日:20221031
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!