一种机械手模组的制作方法
本技术涉及一种机械手领域,尤其涉及一种简约的新型机械手。
背景技术:
1、现有的机械手模组使用的是组建在机架上方的横梁臂来实现xy方向上的自由运动,抓手电机控制机械手手指抓取物品,同时装有旋转电机可以进行90°旋转。例如,一种在中国专利文献上公开的“一种用于物料输送的双臂机械手”,其公告号cn210061143u,包括储料平台、物料箱和两组机械手,每组机械手分别设有吸盘装置、90°旋转电机、y轴升降丝杆组、x轴左右移动组、x轴电机动力组、基板固定支架、y轴电机动力组;两组机械手中的其中一组机械手设置在储料平台的上方,两组机械手中的另一组机械手设置在物料箱的上方;储料平台上放置有物料,两组机械手通过基板固定支架连接,基板固定支架上设有x轴左右移动组和x轴电机动力组,两组机械手沿着基板固定支架左右移动;每组机械手的顶部安装有y轴电机动力组,每组机械手的底部安装有吸盘装置,y轴电机动力组和吸盘装置之间设有y轴升降丝杆组,90°旋转电机连接吸盘装置。
2、横梁臂y向导轨安装在机架两侧,使得整个横梁臂横跨整个机架,体型较大,用料多,而且为保证x向运行顺畅,横梁上的上下导轨槽加工精度要求高,加工成本大。旋转电机所带来的旋转功能,在实验流程中几乎不用,且加装旋转电机后,机械手的调平就有了x、y两个方向,而这两个方向又互相影响,所以调平难度很大,给抓取精度带来了很大的不可靠性。
技术实现思路
1、本实用新型主要解决现有技术模组体型大、用料多以及调试难度大的问题;提供一种机械手模组,将横梁臂进行拆分,使得整个机械结构变得简洁,轻便。
2、本实用新型的上述技术问题主要是通过下述技术方案得以解决的:
3、一种机械手模组,包括外部框架,外部框架的两侧分别设置与x轴导轨滑动连接的x轴导轨滑块,x轴驱动电机设置在一侧的x轴导轨处;外部框架内沿y轴方向设置有光轴支架,机械手组件与光轴支架滑动连接;y轴驱动电机与x轴驱动电机设置在外部框框架的同一侧。
4、将横梁臂进行拆分,x向导轨固定在机架后方,利用光轴和光轴支架来实现y向运动,使得整个机械结构变得简洁,轻便。同时取消机械手旋转电机,省去了调试机械手的旋转精度步骤,增加了机械手运行精度的可靠性。
5、作为优选,所述的外部框架包括平行设置的前门框和底座竖板,前门框与底座竖板之间通过若干连板固定连接,连板至少设置在门框相对的两侧。结构简单,节省材料。
6、作为优选,所述的前门框顶部固定连接有第一x轴导轨滑块,底座竖板底部固定连接有第二x轴导轨滑块。同时在框架前方用连接块与前方的导轨相连接保证了整个框架的水平,避免机械手运动至前方时,整个框架出现前倾。
7、作为优选,垂直于底座竖板平面设置有底座横板,第二x轴导轨滑块固定设置在底座横板下方,y轴驱动电机设置在底座横板上方;第一x轴导轨滑块的底面与前门框平面平行。设置底座横板,将y轴电机与一个x轴滑块设置在同一位置,减小设备的体积,使得设备更加轻便。
8、作为优选,机械手组件侧边通过圆弧轴承与光轴支架连接。通过圆弧轴承使得机械手组件在y轴移动。
9、作为优选,所述的机械手组件包括机械臂和抓手,抓手和机械臂通过螺栓固定连接。直接固定,从而舍去了旋转电机,提高了精度。旋转电机去除,使得机械手只需在一个方向上调平,调平变得更加方便可靠。
10、作为优选,所述的底座横板下方固定设置有零位片。
11、本实用新型的有益效果是:
12、旋转电机去除,使得机械手只需在一个方向上调平,调平变得更加方便可靠;减少了许多的配件,使得生产效率提高;整个机械手模组的结构大幅的被简化,节约了许多的生产成本。
技术特征:
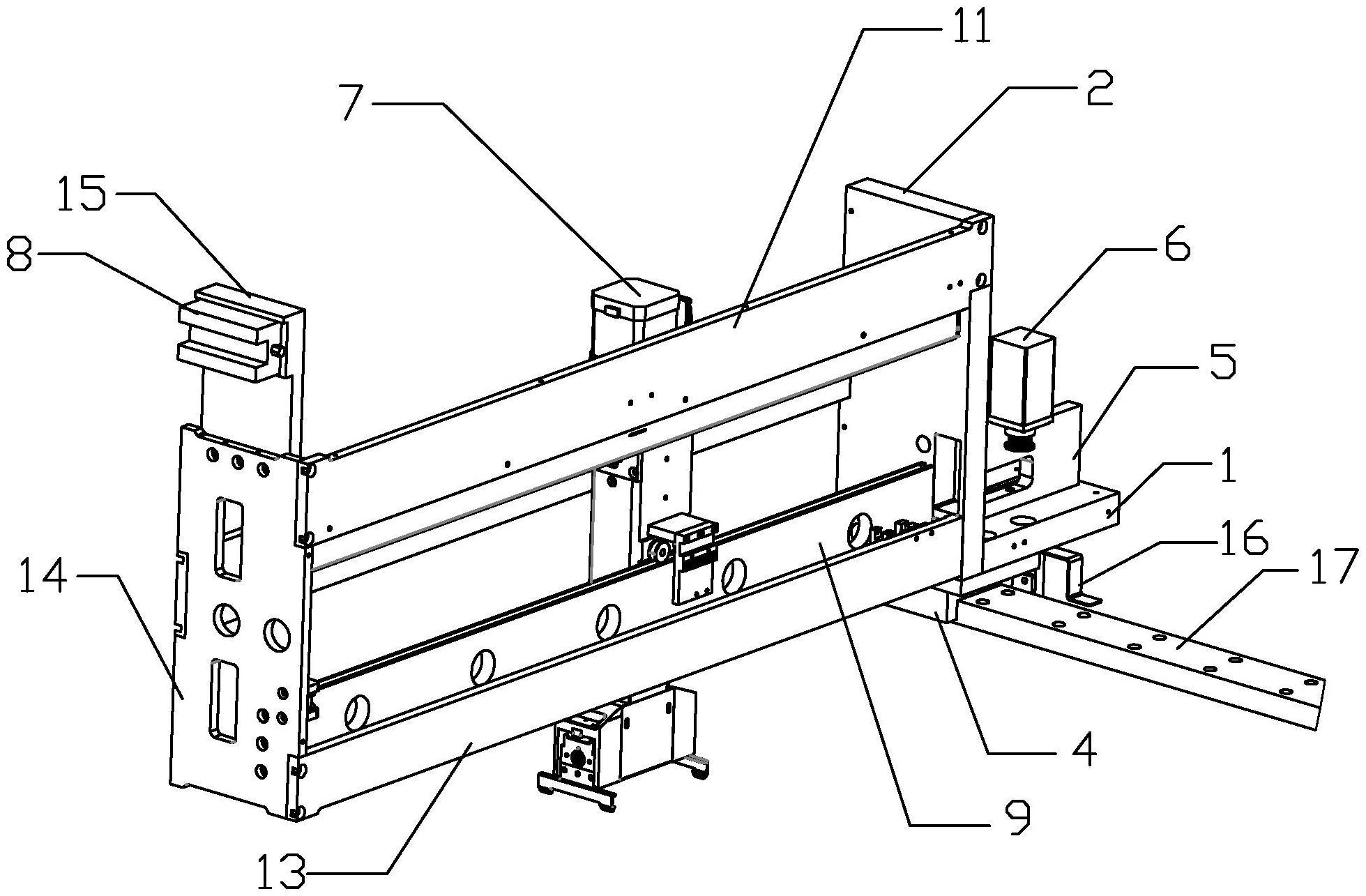
1.一种机械手模组,包括外部框架,其特征在于,外部框架的两侧分别设置与x轴导轨滑动连接的x轴导轨滑块,x轴驱动电机设置在一侧的x轴导轨处;外部框架内沿y轴方向设置有光轴支架(9),机械手组件(7)与光轴支架滑动连接;y轴驱动电机(6)与x轴驱动电机设置在外部框框架的同一侧。
2.根据权利要求1所述的一种机械手模组,其特征在于,所述的外部框架包括平行设置的前门框(14)和底座竖板(2),前门框(14)和底座竖板(2)之间通过若干连板固定连接,连板至少设置在前门框(14)和底座竖板(2)相对的两侧。
3.根据权利要求2所述的一种机械手模组,其特征在于,所述的前门框(14)顶部固定连接有第一x轴导轨滑块(8),底座竖板(2)底部固定连接有第二x轴导轨滑块(4)。
4.根据权利要求2或3所述的一种机械手模组,其特征在于,垂直于底座竖板(2)平面设置有底座横板(1),第二x轴导轨滑块(4)固定设置在底座横板(1)下方,y轴驱动电机(6)设置在底座横板(1)上方;第一x轴导轨滑块(8)的底面与前门框(14)平面平行。
5.根据权利要求1所述的一种机械手模组,其特征在于,机械手组件(7)侧边通过圆弧轴承(10)与光轴支架(9)连接。
6.根据权利要求1或5所述的一种机械手模组,其特征在于,所述的机械手组件(7)包括机械臂和抓手,抓手和机械臂通过螺栓固定连接。
7.根据权利要求4所述的一种机械手模组,其特征在于,所述的底座横板(1)下方固定设置有零位片(16)。
技术总结
本技术公开了一种机械手模组。为了克服现有技术模组体型大、用料多以及调试难度大的问题;本技术包括外部框架,外部框架的两侧分别设置与X轴导轨滑动连接的X轴导轨滑块,X轴驱动电机设置在一侧的X轴导轨处;外部框架内沿Y轴方向设置有光轴支架,机械手组件与光轴支架滑动连接;Y轴驱动电机与X轴驱动电机设置在外部框框架的同一侧。将横梁臂进行拆分,X向导轨固定在机架后方,利用光轴和光轴支架来实现Y向运动,使得整个机械结构变得简洁,轻便。同时取消机械手旋转电机,省去了调试机械手的旋转精度步骤,增加了机械手运行精度的可靠性。
技术研发人员:门海,祁朅,张佳焕,唐建国
受保护的技术使用者:嘉兴科瑞迪医疗器械有限公司
技术研发日:20221129
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!