一种机械臂工作用定位装置的制作方法
本技术涉及机械臂,特别是一种机械臂工作用定位装置。
背景技术:
1、机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。
2、如授权公告号为cn215660322u的一种小型机械臂工作用定位装置,通过设置安装架、移动板、第一衬垫、第二衬垫、固定板、固定螺栓和固定螺母,使装置能够便捷的安装至不同型号大小的机械臂上。但该装置的移动板为平板,而机械臂的杆件形式多样,有圆杆、方杆和多边形杆,使用平板夹持的方式对于方杆能够夹紧,但对于圆杆和多边形杆便不能够很好的进行固定。为此,提出一种机械臂工作用定位装置,作以改进。
技术实现思路
1、本实用新型的目的旨在至少解决所述技术缺陷之一。
2、为此,本实用新型的一个目的在于提出一种机械臂工作用定位装置,以解决背景技术中所提到的问题,克服现有技术中存在的不足。
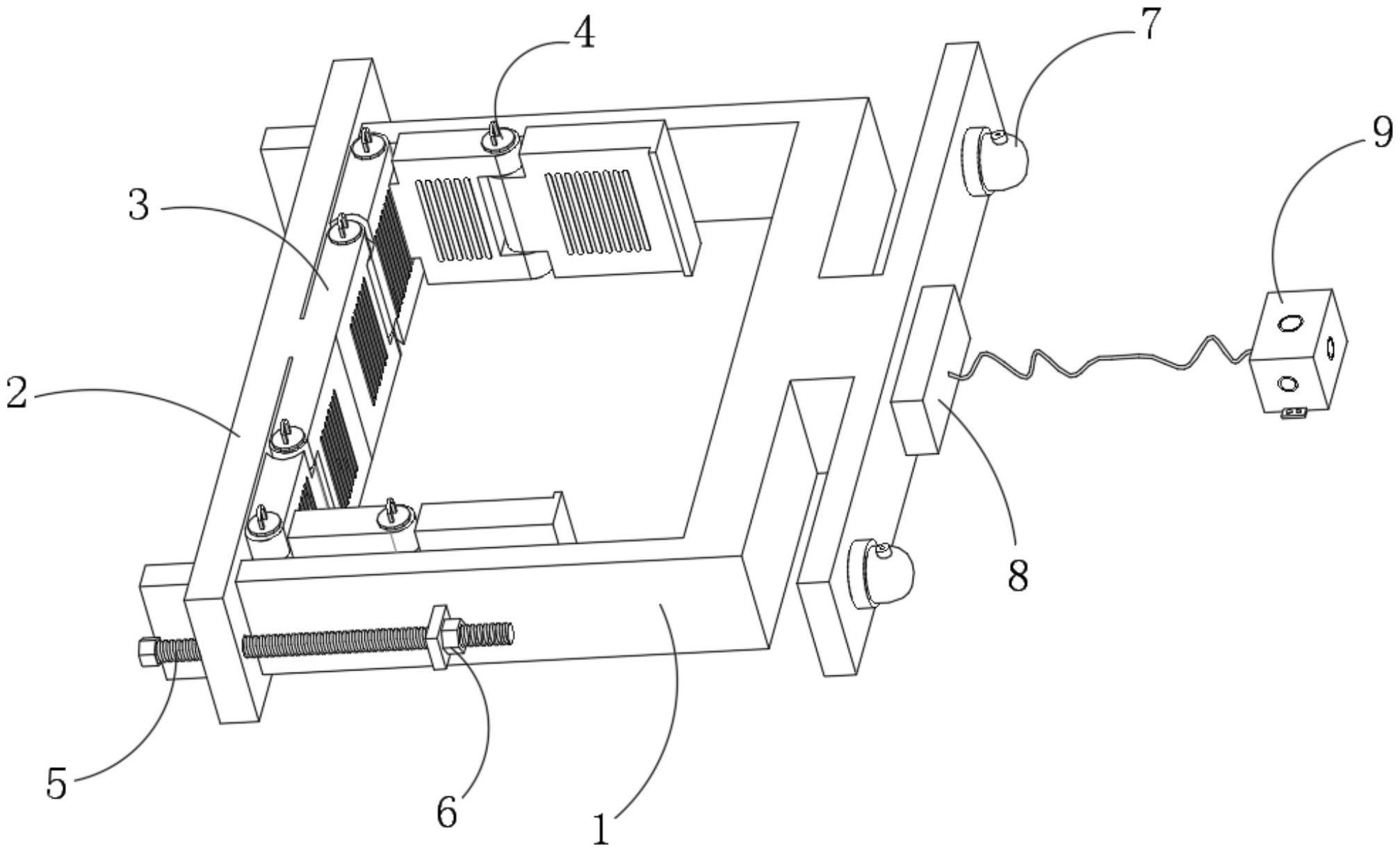
3、为了实现上述目的,本实用新型一方面的实施例提供一种机械臂工作用定位装置,包括安装架和外挂盒;其特征在于,所述安装架底部套接有活动板,所述活动板上固定连接有扣板,所述扣板内插接有锁销,所述活动板两端螺纹连接有螺纹杆,所述螺纹杆末端设置有螺母,所述安装架顶端的两侧设置有摄像头,所述安装架顶端的中部固定连接有控制盒。
4、由上述任一方案优选的是,所述安装架两侧设置有挑板且该挑板上开设有螺纹洞。
5、由上述任一方案优选的是,所述活动板的两端均开设有一个长方形洞和一个螺纹洞。
6、采用上述技术方案:安装架用以安装在机械臂上,并为其他结构提供安装空间。安装架两侧的挑板用于连接并固定活动板,其上螺纹洞可以使螺纹杆转动通过,从而使螺纹杆末端的螺母卡在挑板外,使螺纹杆位置固定。活动板用以紧固机械臂的杆件,使该装置稳定的安装在机械臂上。活动板两侧的长方形洞用以插接安装架的两个侧板,两个螺纹洞则用以插接螺纹杆,进而使得活动板与安装架固定在一起。
7、由上述任一方案优选的是,所述扣板包括固定板、过渡板以及抱合板且三者的表面均设置有粗糙纹。
8、由上述任一方案优选的是,所述锁销包括多边形段和圆形段以及端部的拉环。
9、采用上述技术方案:扣板可以在锁销的配合下进行转向,使该装置可以对多边形杆和圆杆进行抱紧。其中,固定板与活动板固定连接在一起,过渡板通过锁销与固定板连接,抱合板通过锁销与过渡板连接。在连接处,固定板、过渡板和抱合板均开设有正十二边形孔,配合锁销的多边形段,使它们之间两两锁定。当需要调整角度时,可以通过拉动拉环,使多边形段脱离上一节扣板,再转动锁销,下一节扣板会随之转动,而后再将锁销插回原位,扣板之间的角度即被锁定,从而使得扣板可以将多边形杆和圆杆抱紧。
10、由上述任一方案优选的是,所述控制盒中设置有处理器和存储器,所述外挂盒表面设置有距离传感器。
11、由上述任一方案优选的是,所述外挂盒通过可以进行数据传输的连接线与控制盒连接。
12、采用上述技术方案:控制盒用以对摄像头以及外挂盒表面的距离传感器进行控制。具体的,两个视觉定位摄像头可对机械爪的抓取结构和机械爪待抓取的物品不断拍摄,利用三角定位的原理不断确定机械爪抓取结构与待抓取物品的距离,外挂盒安装于机械爪前端的抓取结构上,距离传感器可实时感知机械爪抓取结构与其他物品的间距。距离传感器的感知信息也会实时向控制盒中的处理器反馈,这样可使距离传感器与摄像头的视觉传感相配合,使机械爪的定位移动更加精准。
13、与现有技术相比,本实用新型所具有的优点和有益效果为:
14、1、该机械臂工作用定位装置,通过在活动板内侧设置扣板,并配合锁销,使得工作人员可以通过拉动拉环,使多边形段脱离上一节扣板,再转动锁销,下一节扣板会随之转动,而后再将锁销插回原位,扣板之间的角度即被锁定,依次调整两个过渡板和抱合板的角度,使其扣板整体与机械臂杆的形状适配,进而使该装置可以对圆柱形或多边形的机械臂杆进行抱紧。使该装备具有了更强的适配性,更加实用。
15、2、该机械臂工作用定位装置,通过在固定板、过渡板以及抱合板的表面设置粗糙纹,使它们与机械臂杆之间的接触面增大,进而使它们之间的摩擦力增大,也就使该装置与机械臂之间的连接更加稳定。通过抽插锁销的方式调整扣板的角度,简单方便,使用效率较高。
16、本实用新型附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.一种机械臂工作用定位装置,包括安装架(1)和外挂盒(9);其特征在于,所述安装架(1)底部套接有活动板(2),所述活动板(2)上固定连接有扣板(3),所述扣板(3)内插接有锁销(4),所述活动板(2)两端螺纹连接有螺纹杆(5),所述螺纹杆(5)末端设置有螺母(6),所述安装架(1)顶端的两侧设置有摄像头(7),所述安装架(1)顶端的中部固定连接有控制盒(8)。
2.如权利要求1所述的一种机械臂工作用定位装置,其特征在于:所述安装架(1)两侧设置有挑板且该挑板上开设有螺纹洞。
3.如权利要求2所述的一种机械臂工作用定位装置,其特征在于:所述活动板(2)的两端均开设有一个长方形洞和一个螺纹洞。
4.如权利要求3所述的一种机械臂工作用定位装置,其特征在于:所述扣板(3)包括固定板(301)、过渡板(302)以及抱合板(303)且三者的表面均设置有粗糙纹。
5.如权利要求4所述的一种机械臂工作用定位装置,其特征在于:所述锁销(4)包括多边形段(401)和圆形段(402)以及端部的拉环(403)。
6.如权利要求5所述的一种机械臂工作用定位装置,其特征在于:所述控制盒(8)中设置有处理器和存储器,所述外挂盒(9)表面设置有距离传感器。
7.如权利要求6所述的一种机械臂工作用定位装置,其特征在于:所述外挂盒(9)通过可以进行数据传输的连接线与控制盒(8)连接。
技术总结
本技术提出了一种机械臂工作用定位装置。包括安装架和外挂盒;其特征在于,所述安装架底部套接有活动板,所述活动板上固定连接有扣板,所述扣板内插接有锁销,所述活动板两端螺纹连接有螺纹杆,所述螺纹杆末端设置有螺母,所述安装架顶端的两侧设置有摄像头,所述安装架顶端的中部固定连接有控制盒。本技术的优点在于:通过拉动拉环,使多边形段脱离上一节扣板,再转动锁销,下一节扣板会随之转动,而后再将锁销插回原位,扣板之间的角度即被锁定,依次调整两个过渡板和抱合板的角度,使其扣板整体与机械臂杆的形状适配,进而使该装置可以对圆柱形或多边形的机械臂杆进行抱紧。使该装备具有了更强的适配性。
技术研发人员:周京伟
受保护的技术使用者:山西新远宏科技工业有限公司
技术研发日:20221212
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!