3点定位机械手夹具的制作方法
本技术涉及抓取机构,具体涉及一种3点定位机械手夹具。
背景技术:
1、目前,一些工件在生产过程中,需要反复的抓取。若一直采用人为手工抓取,抓取次数过多,肩膀活动强度较高,花费的劳动力较多,长期如此存在摔坏工件的隐患。尤其是针对表面光洁,易碎的工件(如玻璃制品等),其工件表面清洁度较高,若采用人为抓取,容易在工件表面留下指纹等,影响工件表面的整洁度。提供一种保证工件表面整洁度,抓取更为稳定,解放劳动力的抓取装置时本申请所要解决的问题。
技术实现思路
1、本实用新型要解决的技术问题是:克服现有技术的不足,提供一种保证清洁度及抓取稳定性的3点定位机械手夹具。
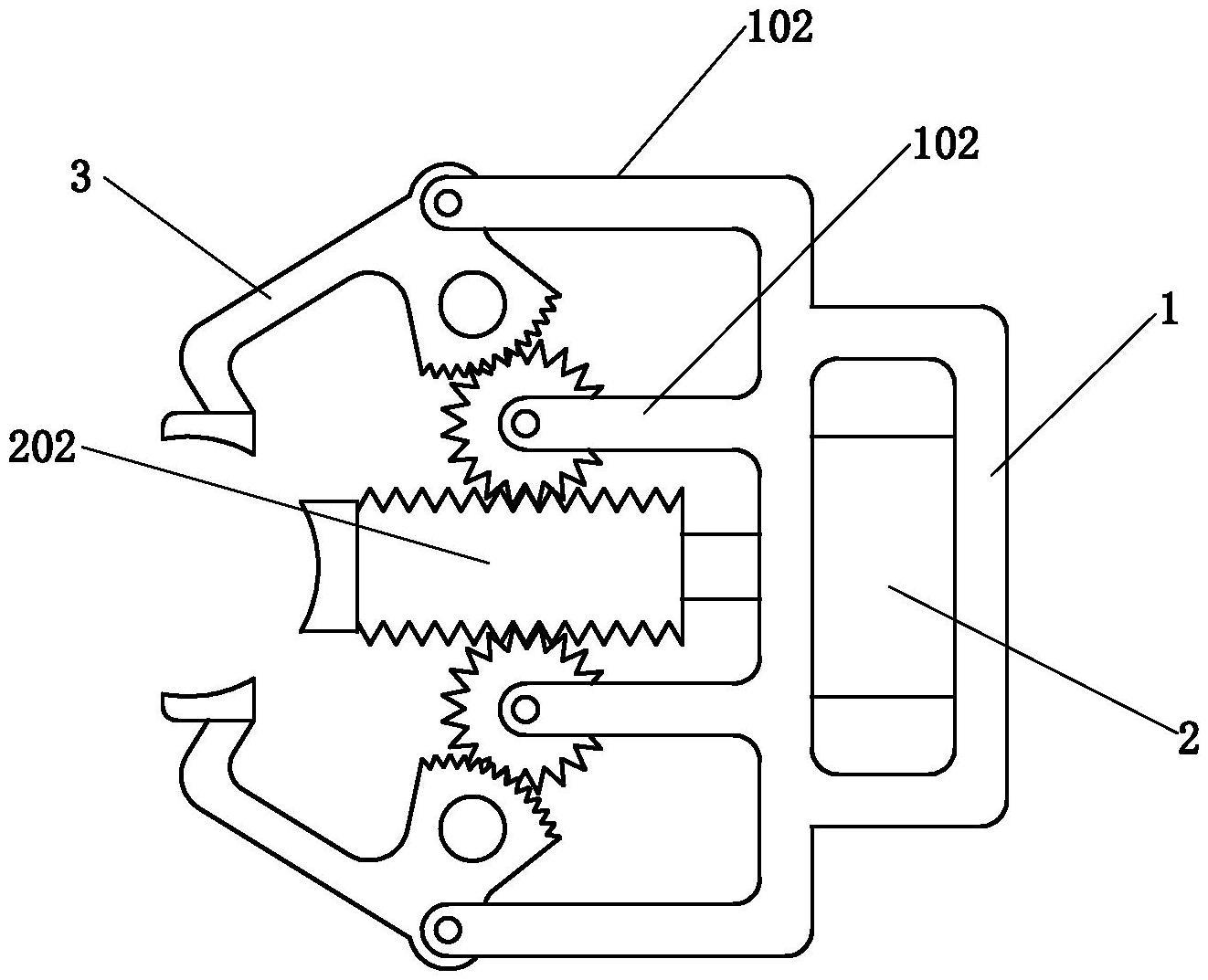
2、本实用新型为解决其技术问题所采用的技术方案为:3点定位机械手夹具,包括架体,所述架体的中部连接有驱动部,所述架体的两侧关于所述驱动部对称设置有夹持部,所述夹持部与所述架体铰接,所述驱动部分别与两个所述夹持部传动连接,所述驱动部驱动两个夹持部相向或背向移动。
3、本申请通过驱动部与夹持部的配合,将工件尤其是圆形工件等进行抓取,抓取时,驱动部驱动两个夹持部相向移动,将工件抓在中间,实现了稳定抓取。
4、所述架体包括与所述驱动部固定连接的固定架,所述固定架的两端分别通过一根连接柱连接所述夹持部;所述连接柱远离所述固定架的一端与所述夹持部铰接。
5、所述驱动部包括与所述固定架固定连接的伸缩驱动件,所述伸缩驱动件朝向夹持部的方向伸出连接有驱动杆,所述驱动杆分别通过齿轮组件与两个所述夹持部传动连接。
6、所述齿轮组件包括驱动杆与夹持部之间设置的中间齿轮,所述中间齿轮通过一根连接柱与所述固定架连接;
7、所述驱动杆的两侧对应所述中间齿轮设置有轮齿,驱动杆与中间齿轮啮合,所述夹持部与连接柱连接的一端设置有与对应中间齿轮啮合的扇形齿轮。
8、所述伸缩驱动件为伸缩气缸,所述伸缩气缸的活塞杆朝向夹持部的方向伸出与驱动杆一端固定连接。
9、夹持部包括夹持杆,所述夹持杆的一端与对应的连接柱一端通过转轴转动连接,所述夹持杆靠近连接柱的一端固定连接所述扇形齿轮,两个所述夹持杆远离所述连接柱的一端相向弯折设置。
10、所述驱动杆远离固定架的一端端部固定设置有橡胶块。
11、所述夹持杆弯折的一端端部固定设置有橡胶块。
12、与现有技术相比,本实用新型具有以下有益效果:
13、本实用新型提供一种3点定位机械手夹具,通过驱动部及两个夹持部,将工件件身的3点固定,实现较为稳定的工件抓取。无需人为干预,满足了玻璃制品等要求件身表面整洁度的要求,同时橡胶块也起到了防滑的作用,保证工件表面整洁度的同时,增加了与工件表面接触的摩擦力,进一步提高了抓取的稳定性。除此以外,橡胶块也具有一定的缓冲作用,一定程度上避免夹持杆及驱动杆夹取易碎工件时,夹取力度过大而导致工件破碎。
技术特征:
1.一种3点定位机械手夹具,其特征在于,包括架体(1),所述架体(1)的中部连接有驱动部,所述架体(1)的两侧关于所述驱动部(2)对称设置有夹持部(3),所述夹持部(3)与所述架体(1)铰接,所述驱动部分别与两个所述夹持部(3)传动连接,所述驱动部驱动两个夹持部(3)相向或背向移动。
2.根据权利要求1所述的3点定位机械手夹具,其特征在于,所述架体(1)包括与所述驱动部固定连接的固定架(101),所述固定架(101)的两端分别通过一根连接柱(102)连接所述夹持部(3);
3.根据权利要求2所述的3点定位机械手夹具,其特征在于,所述驱动部包括与所述固定架(101)固定连接的伸缩驱动件(201),所述伸缩驱动件(201)朝向夹持部(3)的方向伸出连接有驱动杆(202),所述驱动杆(202)分别通过齿轮组件与两个所述夹持部(3)传动连接。
4.根据权利要求3所述的3点定位机械手夹具,其特征在于,所述齿轮组件包括驱动杆(202)与夹持部(3)之间设置的中间齿轮(203),所述中间齿轮(203)通过一根连接柱(102)与所述固定架(101)连接;
5.根据权利要求3所述的3点定位机械手夹具,其特征在于,所述伸缩驱动件(201)为伸缩气缸,所述伸缩气缸的活塞杆朝向夹持部(3)的方向伸出与驱动杆(202)一端固定连接。
6.根据权利要求4所述的3点定位机械手夹具,其特征在于,夹持部(3)包括夹持杆(302),所述夹持杆(302)的一端与对应的连接柱(102)一端转动连接,所述夹持杆(302)靠近连接柱(102)的一端固定连接所述扇形齿轮(301),两个所述夹持杆(302)远离所述连接柱(102)的一端相向弯折设置。
7.根据权利要求4所述的3点定位机械手夹具,其特征在于,所述驱动杆(202)远离固定架(101)的一端端部固定设置有橡胶块。
8.根据权利要求6所述的3点定位机械手夹具,其特征在于,所述夹持杆(302)弯折的一端端部固定设置有橡胶块。
技术总结
本技术涉及抓取机构技术领域,具体涉及一种3点定位机械手夹具,包括架体,所述架体的中部连接有驱动部,所述架体的两侧关于所述驱动部对称设置有夹持部,所述夹持部与所述架体铰接,所述驱动部分别与两个所述夹持部传动连接,所述驱动部驱动两个夹持部相向或背向移动,提供一种保证清洁度及抓取稳定性的3点定位机械手夹具。
技术研发人员:高树辉,姚先贺,孙大德,李继云
受保护的技术使用者:青岛融合装备科技有限公司
技术研发日:20221227
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!