脚定位装置及机械外骨骼的制作方法
本申请涉及康复器械,具体涉及一种脚定位装置及机械外骨骼。
背景技术:
1、机械外骨骼或称动力外骨骼,是一种可让人穿戴的框架式的机器装置,这个装备可以提供额外能量来供四肢运动,也常被用作进行肢体运动康复训练的器械。现有技术中的康复训练用的机械外骨骼,特别是穿戴至下肢的机械外骨骼,末端通常都会设置供使用者脚踏的结构,以便进行脚踝部位的康复活动。
2、但是,现有技术中下肢机械外骨骼的供使用者脚踏的结构,通常都是结构较为简单的踏板结构,虽然能承托脚,但对脚的定位效果差,在使用者自主活动能力较弱、下肢较为僵硬时,脚容易滑脱出去,降低脚踝部位的康复训练效率。
技术实现思路
1、有鉴于此,本申请提供了一种脚定位装置及机械外骨骼,以解决现有技术中下肢机械外骨骼的供使用者脚踏的结构,对脚的定位效果差的问题。
2、为了达到上述目的,本申请提供如下技术方案:
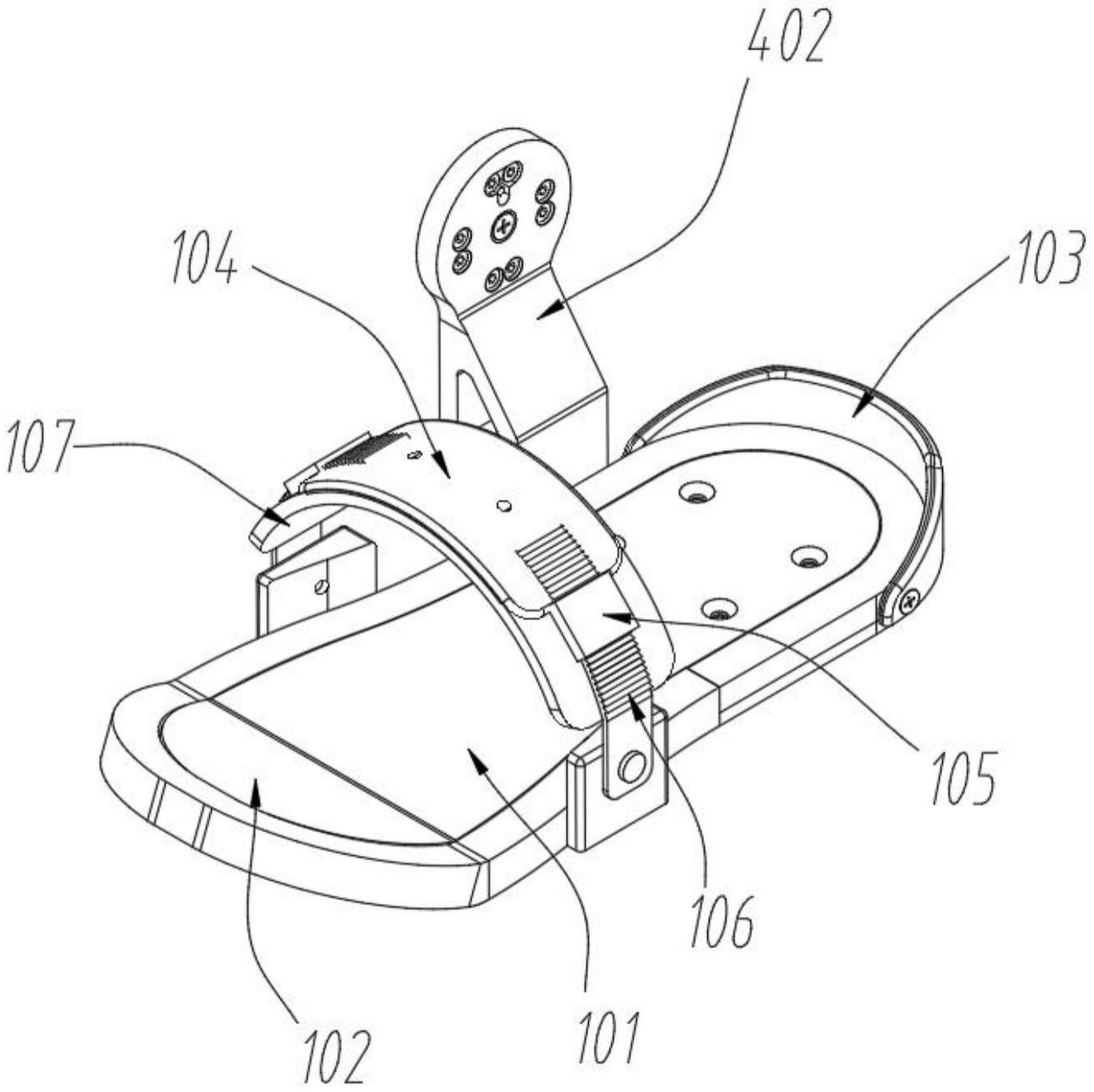
3、一种脚定位装置,包括能够放置脚的脚踏件;其中,
4、所述脚踏件上设有第一限位结构与第二限位结构,所述第一限位结构与所述第二限位结构配合能够对所述脚踏件上的脚前后限位;和/或,
5、所述脚踏件上设有能够阻挡在脚背上方的第三限位结构。
6、可选的,所述第三限位结构通过松紧组件与所述脚踏件连接,以使所述第三限位结构与所述脚踏板之间的空间能够调节。
7、可选的,所述第一限位结构包括相对于所述脚踏件翘起的翘板,所述翘板能够支撑脚趾。
8、可选的,所述第二限位结构包括相对于所述脚踏件凸出的围板,所述围板能够围在脚跟周围。
9、可选的,所述第三限位结构包括背带,所述松紧组件包括卡扣与调节带,所述卡扣与所述调节带中的其中一者设置在所述背带上且另一者设置在所述脚踏件上,所述调节带上沿长度方向分布有多个棘齿,所述卡扣中设有能够与所述棘齿啮合的卡齿,所述调节带能够伸入所述卡扣中并沿所述卡扣单向移动。
10、可选的,所述背带的内侧设有软弹的护带,所述护带能够与脚背接触。
11、一种机械外骨骼,包括主体装置以及上述任一项中的的脚定位装置,所述脚定位装置连接在所述主体装置的底端,所述主体装置能够供下肢穿戴并带动下肢屈伸。
12、可选的,所述主体装置包括:
13、第一连接结构;
14、第一支撑结构,设置在所述第一连接结构上,能够抵在大腿的后侧;
15、第二连接结构;
16、第二支撑结构,设置在所述第二连接结构上,能够抵在小腿的前侧;
17、关节驱动机构;
18、其中,所述第一连接结构的顶端、所述第一连接结构与所述第二连接结构之间、所述第二连接结构与所述脚定位装置之间均设有所述关节驱动机构,以使所述第一连接结构能够转动、所述第二连接结构能够相对于所述第一连接结构转动、所述脚定位装置能够相对于所述第二连接结构转动。
19、可选的,所述第一支撑结构通过旋转锁止结构与所述第一连接结构连接,以使所述第一支撑结构能够相对所述第一连接结构转动并锁止;和/或,
20、所述第二支撑结构通过所述旋转锁止结构与所述第二连接结构连接,以使所述第二支撑结构能够相对所述第二连接结构转动并锁止。
21、可选的,所述关节驱动机构包括:
22、关节腿臂;
23、悬臂;
24、关节电机,连接在所述关节腿臂与所述悬臂之间,以驱动所述关节腿臂与所述悬臂产生相对转动;
25、力矩传感器,设置在所述关节电机与所述悬臂之间,以检测所述关节电机的转动力矩。
26、其中,所述关节腿臂与所述悬臂上均设有用于与外部结构安装连接的连接孔。
27、可选的,所述第一支撑结构与所述第二支撑结构均包括弧形板,且所述弧形板的凹面朝向下肢所在侧。
28、可选的,所述第一连接结构与所述第二连接结构均包括能调节并固定长度的调节杆。
29、可选的,所述关节腿臂上设有限制所述关节腿臂与所述悬臂相对转动角度范围的限位凸起。
30、可选的,所述关节电机具有外圈结构以及在所述外圈结构中自转的内圈结构,所述外圈结构与所述关节腿臂固接,所述力矩传感器的外圈与所述内圈结构连接,且所述力矩传感器的周向以及轴向设有轴承组件,所述力矩传感器的内圈与所述悬臂固定连接。
31、可选的,所述第一支撑结构与所述第二支撑结构均还包括连接在所述弧形板上的绑带,所述绑带能够绑接在下肢周围。
32、本申请提供的脚定位装置,以脚踏件作为主体基础,在脚踏件上设置相配合并对脚进行前后限位的第一限位结构与第二限位结构,或者在脚踏件上设置阻挡在脚背上方的第三限位结构,或者第一限位结构与第二限位结构以及第三限位结构均设置,这样一来,使用者的脚踏在脚踏件上,由于第一限位结构与第二限位结构的配合,形成对脚趾和脚跟的前后限位作用,或者由于第三限位结构对脚背的阻拦作用,使用者的脚不会从脚踏件上滑脱出去,保证使用者的脚与脚定位装置能够保持稳定良好的穿戴关系,使得脚定位装置所在的下肢机械外骨骼在针对脚踝的康复训练方面具有高效率,解决了现有技术中下肢的机械外骨骼的供使用者脚踏的结构,对脚的定位效果差的问题。
技术特征:
1.一种脚定位装置,其特征在于,包括能够放置脚的脚踏件;其中,
2.根据权利要求1所述的脚定位装置,其特征在于,所述第三限位结构通过松紧组件与所述脚踏件连接,以使所述第三限位结构与所述脚踏件之间的空间能够调节。
3.根据权利要求2所述的脚定位装置,其特征在于,所述第三限位结构包括背带,所述松紧组件包括卡扣与调节带,所述卡扣与所述调节带中的其中一者设置在所述背带上且另一者设置在所述脚踏件上,所述调节带上沿长度方向分布有多个棘齿,所述卡扣中设有能够与所述棘齿啮合的卡齿,所述调节带能够伸入所述卡扣中并沿所述卡扣单向移动。
4.根据权利要求3所述的脚定位装置,其特征在于,所述背带的内侧设有软弹的护带,所述护带能够与脚背接触。
5.一种机械外骨骼,其特征在于,包括主体装置以及如权利要求1-4任一项所述的脚定位装置,所述脚定位装置连接在所述主体装置的底端,所述主体装置能够供下肢穿戴并带动下肢屈伸。
6.根据权利要求5所述的机械外骨骼,其特征在于,所述主体装置包括:
7.根据权利要求6所述的机械外骨骼,其特征在于,所述第一支撑结构通过旋转锁止结构与所述第一连接结构连接,以使所述第一支撑结构能够相对所述第一连接结构转动并锁止;和/或,
8.根据权利要求6所述的机械外骨骼,其特征在于,所述关节驱动机构包括:
9.根据权利要求6所述的机械外骨骼,其特征在于,所述第一支撑结构与所述第二支撑结构均包括弧形板,且所述弧形板的凹面朝向下肢所在侧。
10.根据权利要求6所述的机械外骨骼,其特征在于,所述第一连接结构与所述第二连接结构均包括能调节并固定长度的调节杆。
11.根据权利要求8所述的机械外骨骼,其特征在于,所述关节腿臂上设有限制所述关节腿臂与所述悬臂相对转动角度范围的限位凸起。
12.根据权利要求8所述的机械外骨骼,其特征在于,所述关节电机具有外圈结构以及在所述外圈结构中自转的内圈结构,所述外圈结构与所述关节腿臂固接,所述力矩传感器的外圈与所述内圈结构连接,且所述力矩传感器的周向以及轴向设有轴承组件,所述力矩传感器的内圈与所述悬臂固定连接。
13.根据权利要求9所述的机械外骨骼,其特征在于,所述第一支撑结构与所述第二支撑结构均还包括连接在所述弧形板上的绑带,所述绑带能够绑接在下肢周围。
技术总结
本申请提供了一种脚定位装置及机械外骨骼,脚定位装置以脚踏件作为主体基础,在脚踏件上设置相配合并对脚进行前后限位的第一限位结构与第二限位结构,或者在脚踏件上设置阻挡在脚背上方的第三限位结构,或者第一限位结构与第二限位结构以及第三限位结构均设置,使用者的脚踏在脚踏件上,由于第一限位结构与第二限位结构的配合对脚的前后限位作用,或者由于第三限位结构对脚背的阻拦作用,使用者的脚不会从脚踏件上滑脱出去,保证使用者的脚与脚定位装置能够保持稳定良好的穿戴关系,使得脚定位装置所在的下肢机械外骨骼在针对脚踝的康复训练方面具有高效率,解决了现有技术中下肢的机械外骨骼的供使用者脚踏的结构,对脚的定位效果差的问题。
技术研发人员:魏家鑫,李明会,于桂洋,胡慧慧,李清,方小伟
受保护的技术使用者:科大讯飞(苏州)科技有限公司
技术研发日:20221230
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!