用于移动机器人的可部署安全栅栏的制作方法
背景技术:
1、工业移动机器人技术领域随着大量的agv(自动导引车)和amr(自主移动机器人)而迅速增长,这些agv(自动导引车)和amr(自主移动机器人)很容易从许多不同的制造商那里获得。然而,一种仍然处于其初期的这种系统是agv或amr系统,其中工业机器人操纵器集成在agv或amr系统中/其上。虽然有许多因素使得这种系统具有部署的挑战性,但主要原因之一是安全性。能够处理重的有效载荷的大型工业移动机器人系统必然是强大的,因此对在其附近工作的人员造成了安全风险。工业上公认的安全标准在指导工程师应用安全设备和编程方面是适当的。然而,这些标准没有考虑工业agv和工业机器人臂的组合系统。目前有一些组织正在处理适用于这种系统的协调标准,但这些标准仍然处于初期。
2、数据中心需要一种自动操作服务器托盘和其中的电池的系统。传统上,这些类型的系统依靠水平安装的安全激光雷达扫描仪来检测进入机器人周围的受保护区域的某物(或某人)的存在。这种解决方案在机器人具有无障碍的“可视性”的开放区域中或者在具有明确的几何形状的区域中是有效的,从而安全传感器可以相应地检测和修改它们的保护领域。不幸的是,在一些数据中心中,系统打算在其中操作的过道不是宽敞的,过道也不具有安全系统可以利用的明确的或一致的几何形状。
3、应用于系统的agv部分的安全标准考虑了这些类型的操作环境,但是对于安装在agv顶部的工业机器人,过道内的有限空间和机架位置的可变性提出了严重的挑战。安装在过道中的服务器机架提供了这样的区域,在该区域中,人员可以从机器人的安全激光雷达中隐藏自己,从而阻止他们观看,并且允许他们过于接近造成安全风险的过程。
技术实现思路
1、本公开提供了一种用于自动导引车安全的系统和一种用于部署自动导引车(agv)的虚拟安全栅栏的方法。
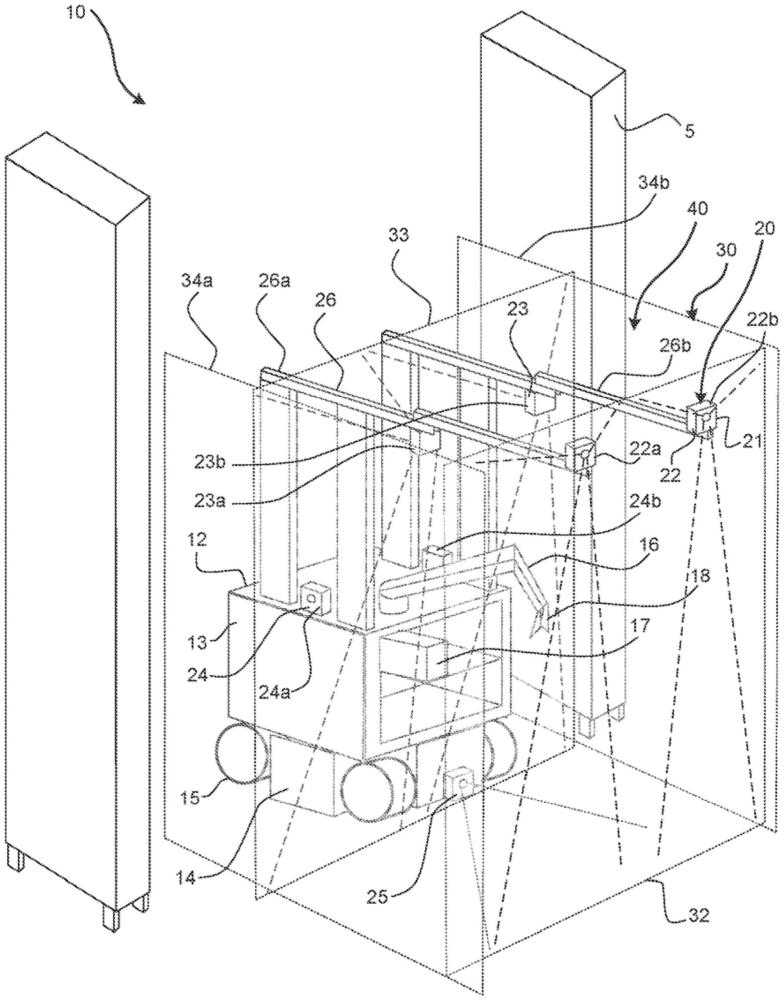
2、本发明的一个方面提供了一种用于自动导引车安全的系统。该系统可以包括agv,该agv具有被构造成移动agv的推进系统,以及被构造成控制推进系统的处理器,以及被构造成部署至少部分地围绕agv的虚拟安全栅栏的激光成像系统。激光成像系统可以包括多个激光成像传感器,所述多个激光成像传感器包括前传感器和后传感器,以及可移动吊杆,所述前传感器安装到所述可移动吊杆并且被构造成在agv的壳体的前面延伸。将前传感器安装在可移动吊杆上的优点在于,前传感器可以连同可移动吊杆一起延伸到壳体之外。然后,前传感器和后传感器分别用于围绕agv部署工作区域的平面前边界和平面后边界,从而产生围绕agv的虚拟安全栅栏。
3、该系统还可以包括安装在agv上并具有末端执行器的机器人操纵器,该末端执行器构造成在agv的壳体前面延伸第一最大距离。虚拟安全栅栏可以至少部分地围绕机器人操纵器的工作区域,并且前传感器可以被构造成延伸到agv的壳体前面的第二距离,第二距离大于第一最大距离。
4、前传感器可以是第一前传感器。所述多个激光成像传感器还可以包括第二前传感器,所述第二前传感器安装到所述可移动吊杆并且被构造成延伸到所述agv的所述壳体前面的所述第二距离。第一和第二前传感器可以一起构造成部署机器人操纵器的工作区域的平面前边界。后传感器可以是安装到agv的壳体的第一后传感器。多个激光成像传感器还可以包括安装到agv的壳体的第二后传感器。第一和第二后传感器可以一起构造成部署机器人操纵器的工作区域的平面后边界。
5、多个激光成像传感器还可以包括左传感器和右传感器,各自安装到agv的壳体。左传感器可构造成部署机器人操纵器的工作区域的平面左边界。右传感器可以被构造成部署机器人操纵器的工作区域的平面右边界。激光成像系统可以被构造为如果在机器人操纵器的工作区域的相应左侧或右侧感测到存储机架,则使左传感器和右传感器中的一个或多个静音,使得机器人操纵器的工作区域由存储机架而不是相应的平面左边界或平面右边界界定。
6、平面前边界,平面后边界,平面左边界和平面右边界可以一起形成机器人操纵器的工作区域的完整周边。所述多个激光成像传感器还可以包括安装到agv的壳体前面的底部传感器,所述底部传感器被构造为检测人是否被布置在机器人操纵器的工作区域的地板上。agv可构造成存储多个有效载荷,并且机器人操纵器可构造成将多个有效载荷中的一个或多个放置在邻近机器人操纵器的工作区域设置的存储机架内的空位置。
7、末端执行器可构造成在agv的壳体上方延伸第三最大距离,并且前传感器和后传感器均可设置在agv的壳体上方的第四距离处,第四距离大于第三最大距离。推进系统可以包括可旋转地安装到壳体的多个轮、被构造成旋转轮的驱动元件、被构造成沿着预定路径导航壳体的转向系统、以及被构造成控制驱动元件和转向系统的处理器。
8、本公开的另一方面提供了一种用于部署自动导引车的虚拟安全栅栏的方法。该方法可以包括通过导航agv的推进系统将agv移动到工作区域,agv具有包括前传感器和后传感器的多个激光成像传感器。该方法可以包括部署至少部分围绕agv的虚拟安全栅栏。虚拟安全栅栏的部署可以包括在agv的壳体前面移动前传感器,该移动包括平移安装有前传感器的可移动吊杆。虚拟安全栅栏的部署可以包括利用前传感器和后传感器扫描工作区域的平面边界,以确定移动物体是否进入工作区域。
9、工作区域可以是安装到agv上的机器人操纵器的工作区域,机器人操纵器具有末端执行器,该末端执行器被构造成延伸到agv的壳体前面的第一最大距离,并且虚拟安全栅栏可以至少部分地围绕机器人操纵器的工作区域。该方法还可以包括将前传感器移动到agv的壳体前面的第二距离,该第二距离大于第一最大距离。
10、所述前传感器可以是第一前传感器,所述多个激光成像传感器还可以包括安装到所述可移动吊杆的第二前传感器,所述虚拟安全栅栏的部署还可以包括将所述第二前传感器延伸到所述agv的壳体前面的第二距离,并且所述第一和第二前传感器可以一起部署所述机器人操纵器的工作区域的平面前边界。后传感器可以是安装到agv的壳体上的第一后传感器,多个激光成像传感器还可以包括安装到agv的壳体上的第二后传感器,虚拟安全栅栏的部署还可以包括第一和第二后传感器一起部署机器人操纵器的工作区域的平面后边界。
11、多个激光成像传感器还可以包括左传感器和右传感器,每个安装到agv的壳体。虚拟安全栅栏的部署还可以包括左传感器部署机器人操纵器的工作区域的平面左边界,以及右传感器部署机器人操纵器的工作区域的平面右边界。该方法还可以包括前传感器中的一个或后传感器中的一个感测存储机架被设置在机器人操纵器的工作区域的左侧或右侧。该方法还可以包括使相应的左传感器和右传感器中的一个或多个静音,使得机器人操纵器的工作区域由存储机架而不是相应的平面左边界或平面右边界界定。
12、平面前边界,平面后边界,平面左边界和平面右边界可以一起形成机器人操纵器的工作区域的完整周边。多个激光成像传感器还可以包括安装到agv的壳体前面的底部传感器,虚拟安全栅栏的部署还包括底部传感器检测人是否设置在机器人操纵器的工作区域的地板上。agv可以被构造成存储多个有效载荷,该方法还包括机器人操纵器将多个有效载荷中的一个或多个放置在邻近机器人操纵器的工作区域设置的存储机架内的空位置。
13、末端执行器可构造成在agv的壳体上方延伸第三最大距离,并且前传感器和后传感器均可设置在agv的壳体上方的第四距离处,第四距离大于第三最大距离。推进系统可以包括可旋转地安装到壳体的多个轮、被构造成旋转轮的驱动元件、被构造成沿着预定路径导航壳体的转向系统、以及被构造成控制驱动元件和转向系统的处理器。
- 还没有人留言评论。精彩留言会获得点赞!