机械手
概括地,本发明涉及一种机械手,更具体地涉及一种拟人机械手。
背景技术:
1、由于系统复杂且成本高昂,全驱动机械手虽然可以完成非常复杂的任务,但其应用受到限制。为了减小机械手的整体尺寸和成本,广泛使用欠驱动机构,这是指其具有的驱动器少于自由度的机构。欠驱动机械手比全驱动机械手更轻、更易控制、更经济,但缺乏相对灵活性。
2、现有的欠驱动机械手根据其运动行为可以分为自适应装置和固定运动耦合装置。在固定运动耦合装置中,运动在一个致动器下的关节之间耦合。通常,一个关节的运动会导致其他耦合关节按比例运动。这样,如果发生接触阻断了一个关节的运动,则所有耦合的关节都会被固定。
3、在自适应装置中,在近端手指接触物体后,远端手指可以继续运动。该自适应机构使得手指能够被动地适应物体的轮廓。欠驱动机械手需要设计得更具适应性、顺应性和拟人化,以将其应用范围扩大到接近人类日常生活的非结构化环境。然而,现有的欠驱动机械手仅包含上述的一些标准而没有包含所有标准。
4、期望克服所有或至少一个上述问题。
技术实现思路
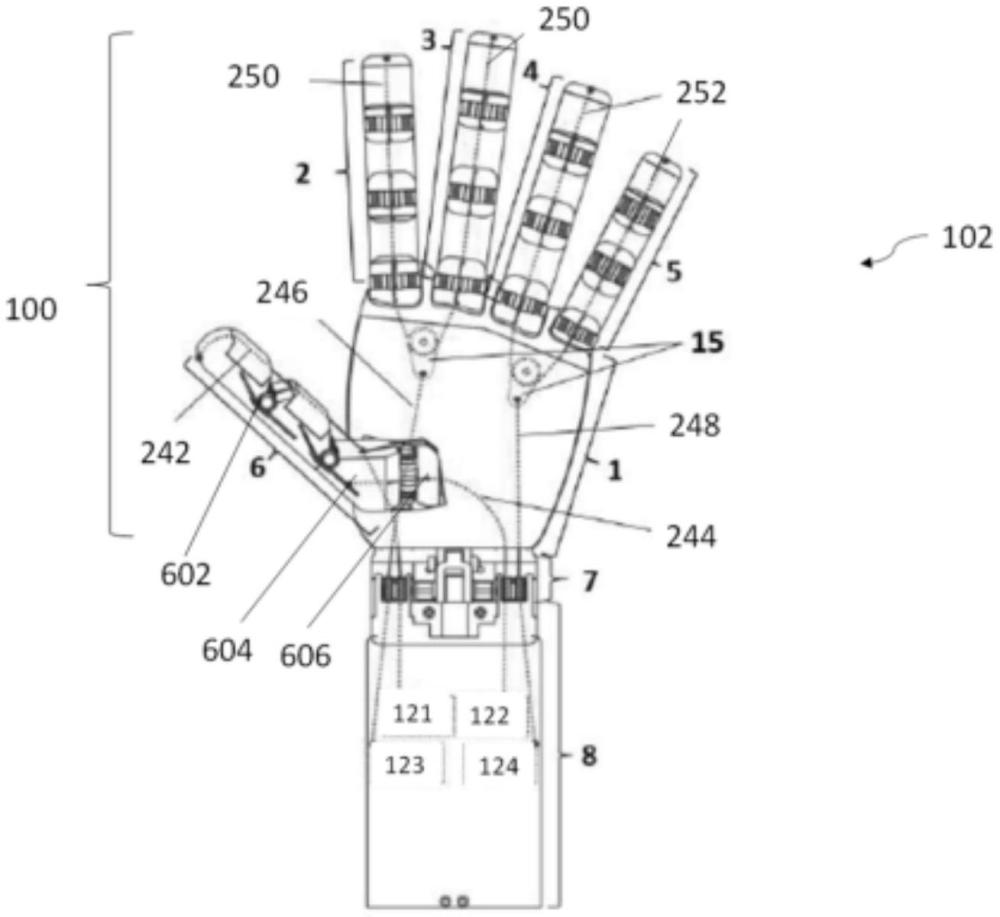
1、本文公开了一种拟人机械手,包括:
2、多个手指;
3、拇指;
4、本体,手指和拇指从本体伸出;
5、一个或多个差动组件,每个差动组件控制两个手指的屈曲和/或伸展,每个差动组件包括:
6、差动机构,其使用时通过腱连接到电机;和
7、另一个腱,其穿过差动机构延伸至该两个手指;和
8、拇指腱,其在使用中从拇指电机延伸至拇指的腕掌关节,拇指腱由拇指电机致动以控制拇指的内收和/或外展。
9、在一些实施例中,多个手指包括四个手指,并且机械手包括两个差动组件,每个差动组件分别控制不同的两个手指。
10、在一些实施例中,机械手还包括从拇指的指间关节延伸穿过掌指关节的腱,在电机被使用时,该腱被致动以控制拇指的伸展和/或屈曲。
11、在一些实施例中,手指和拇指中的每一个包括多个关节,每个关节包括偏置构件以在伸展状态下偏置相应的关节。
12、在一些实施例中,每个差动组件的另一个腱具有两个相对端,该两个相对端分别连接到两个手指中的不同指尖。
13、在一些实施例中,每个差动机构被配置为平衡相应两个手指上的力。
14、在一些实施例中,机械手包括掌部分,每个差动组件的差动机构位于掌部分中。
15、本文还公开了一种拟人下臂组件,包括:
16、前臂;
17、上述机械手;和
18、连接前臂和机械手的腕部。
19、在一些实施例中,下臂组件包括设置在前臂内的用于每个差动组件的电机、用于控制拇指内收和/或外展的电机、以及用于控制拇指屈曲和/或伸展的电机。
20、在一些实施例中,用于每个差动组件的电机控制手指的屈曲和伸展,用于控制拇指的内收和/或外展的电机控制内收和外展,用于控制拇指的屈曲和/或伸展的电机控制拇指的屈曲和伸展。
21、在一些实施例中,用于每个差动组件的电机将差动机构拉向相应的电机以减小电机与差动机构之间的距离,从而引起手指的屈曲。
22、在一些实施例中,下臂组件还包括设置在前臂中的线性电机,其用于控制腕部的旋转。
技术特征:
1.一种拟人机械手,包含:
2.根据权利要求1所述的机械手,其中所述多个手指包含四个手指,并且所述机械手包含两个所述差动组件,每个所述差动组件分别控制不同的两个手指。
3.根据权利要求1或2所述的机械手,其中还包含从所述拇指的指间关节延伸穿过掌指关节的腱,在电机被使用时,所述腱被致动以控制所述拇指的伸展和/或屈曲。
4.根据权利要求1至3中任一项所述的机械手,其中所述手指和所述拇指中的每一个包括多个关节,每个关节包括偏置构件以在伸展状态下偏置相应的关节。
5.根据权利要求1至4中任一项所述的机械手,其中每个所述差动组件的所述另一个腱具有两个相对端,所述两个相对端分别连接到所述两个手指中的不同指尖。
6.根据权利要求1至5中任一项所述的机械手,其中每个所述差动机构被配置为平衡相应的所述两个手指上的力。
7.根据权利要求1至6中任一项所述的机械手,包含掌部分,每个所述差动组件的所述差动机构位于所述掌部分中。
8.一种拟人下臂组件,包含:
9.根据权利要求8所述的下臂组件,包含位于所述前臂内的用于每个所述差动组件的所述电机、用于控制所述拇指内收和/或外展的所述电机、以及用于控制所述拇指屈曲和/或伸展的所述电机。
10.根据权利要求9所述的下臂组件,其中用于每个所述差动组件的所述电机控制所述手指的屈曲和伸展,用于控制所述拇指的内收和/或外展的所述电机控制内收和外展,用于控制所述拇指的屈曲和/或伸展的所述电机控制所述拇指的屈曲和伸展。
11.根据权利要求9或10所述的下臂组件,其中用于每个所述差动组件的所述电机将所述差动机构拉向相应的电机以减小所述电机与所述差动机构之间的距离,从而引起所述手指的屈曲。
12.根据权利要求8至11中任一项所述的下臂组件,还包含设置在所述前臂中的线性电机,其用于控制所述腕部的旋转。
技术总结
一种拟人机械手,包含:多个手指;拇指;本体,手指和拇指从本体延伸;一个或多个差动组件,每个差动组件控制两个手指的屈曲和/或伸展,每个差动组件包含:差动机构,其在使用时通过腱连接到电机;和另一个腱,其穿过差动机构延伸至两个手指;和拇指腱,其在使用中从拇指电机延伸至拇指的腕掌关节,拇指腱由拇指电机致动以控制拇指的内收和/或外展。
技术研发人员:喻豪勇,潘鲁锋
受保护的技术使用者:新加坡国立大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!