一种五轴码垛机器人的制作方法
本发明涉及一种五轴码垛机器人,属于工业机器人领域。
背景技术:
1、码垛机器人是将货物按一定排列码放在托盘或指定的空间内,可以根据程序实现自动堆码,可堆码多层。码垛机器人可大大地降低劳动强度、节约人员成本,目前已广泛应用于自动化流水线、搬运码垛、集装箱搬运、机床上下料等自动搬运作业中。
2、授权公告号cn2902981y的实用新型专利公开了一种物品码垛机器搬运装置,其包括由可水平回转的底座、垂直滑动传动装置、水平滑动传动装置、机械臂、机械抓头组成;各个传动装置与可水平回转的底座可以分开单独运动,也可以同时配合动作;机械手上装有水平平衡定位装置,在机械手的运动过程中使机械手抓头始终保持水平。该实用新型的弊端主要在于:1.大小臂驱动运动均为为伺服电机带动同步带轮、滚珠丝杠、垂直导轨、水平导轨、滑块组件等,组件多导致输出效率低、精度低;机构复杂且不易维护,导致实现成本高;3.当大臂停止驱动,只驱动小臂那么大臂也随之转动,增加了小臂的负载,导致功耗增加;4.小臂驱动装置复杂、空间大,占用了码垛空间,导致码垛空间小;5.机械手连杆多,驱动连杆运动的装置负载大、功耗大;6.三角形定位杆结构尺寸大,导致负载大;7.码垛高度受大小臂尺寸及水平丝杆导轨、垂直丝杆导轨的行程限制,即码垛高度增高就需要增加其结构尺寸,导致增加水平回转的电机负载,且丝杆、导轨的制造、维护保养的成本高。
3、授权公告号cn207632130u的实用新型专利公开了一种通用码垛机器人,其包括底座、转座、大臂、小臂、手腕、转座驱动电机、大臂驱动电机和小臂驱动电机,手腕转动设置在小臂的另一端,还设置有大臂辅助杆和中间辅助杆,中间辅助杆转动设置在大臂的上部并且可与小臂同轴转动,大臂辅助杆的上端与中间辅助杆转动连接,大臂辅助杆的下端与转座转动连接。该实用新型的弊端主要在于:1.小臂驱动电机在大臂的尽头,导致大臂负载大、转动惯量大;2.中间辅助杆结构尺寸大,导致负载大;3.码垛高度受大小臂尺寸限制,即码垛高度高那么大小臂尺寸大、电机负载大且机构不灵活;4.驱动装置复杂、空间大、占用了码垛空间。
4、授权公告号cn217513884u的实用新型专利公开了一种立柱式码垛机器人,其包括回转支撑座、回转机构、支撑立柱、升降机构、水平滑动机构、转动夹持机构、控制器,回转机构设置在回转支撑座上,支撑立柱呈竖直设置状态,且回转机构用于带动支撑立柱进行自由转动,升降机构包括升降驱动机构、水平支撑架,水平滑动机构包括水平驱动机构、第一同步带、水平滑动支架、第二同步带,转动夹持机构包括滑动连接板、第一转动机构、夹持机构。该实用新型的弊端在于:1.机构复杂且不易维护、实现成本高,且体积大、运动过程中惯量大,导致电机功耗大;2.大小臂为悬臂结构,结构强度要求高,导致重量大、旋转惯量大、电机功耗大;3.回转底座需要频繁带动支撑立柱、大小臂、及配重等一同旋转,导致负载大、转动惯量大、电机功耗高;4.传动装置多采用链条传动,导致精度低且维护成本高需要定期更换;5.大小臂的驱动装置均装在悬臂结构上,导致其上下移动及转动惯量大、电机功耗高;6.码垛过程中其支撑立柱需要跟随码垛取放高度频繁调整,导致码垛速度慢、电机功耗高。
技术实现思路
1、本发明旨在提供一种五轴码垛机器人,该码垛机器人结构简单、体积小、精度高、功耗低、码垛速度快、码垛范围大且操作灵活。
2、为了实现上述目的,本发明所采用的技术方案是:
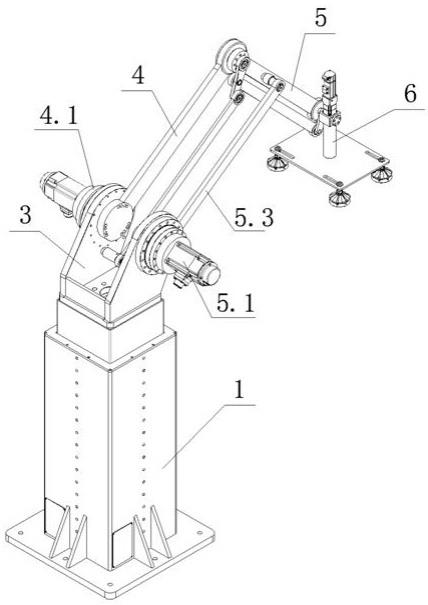
3、一种五轴码垛机器人,包括升降平台装置、旋转装置、大臂支座、大臂机构、小臂机构和抓放机构;所述小臂机构与大臂机构转动连接,小臂机构的另一端可相对抓放机构转动;其特点是:
4、所述旋转装置固定在升降平台装置上,大臂支座固定在旋转装置的输出端上并可相对升降平台装置转动;
5、所述大臂支座上装有大臂机构,该大臂机构由大臂电机减速机的输出端驱动转动;
6、所述大臂支座上还装有第一小臂连杆,该第一小臂连杆由小臂电机减速机的输出端驱动转动,第一小臂连杆的另一端可相对第二小臂连杆的一端转动,第二小臂连杆的另一端通过小臂驱动旋转轴可相对小臂机构转动;所述第一小臂连杆、第二小臂连杆、小臂机构的一段和大臂机构形成四连杆机构;
7、所述大臂支座上面的大臂支座旋转轴与第一平行杆的一端转动连接,该第一平行杆的另一端与第二平行杆一端转动连接,第二平行杆另一端与大臂机构和小臂机构同轴转动连接;
8、所述第二平行杆通过第二平行杆旋转轴可相对第三平行杆的一端转动,该第三平行杆的另一端可相对第四平行杆的一端转动,第四平行杆的另一端与小臂机构的末端转动连接;
9、所述第一平行杆、第二平行杆、大臂机构和大臂支座的一段形成第一平行四连杆机构;所述第二平行杆的至少一段、第三平行杆、第四平行杆和小臂机构形成第二平行四连杆机构;所述第一平行四连杆机构和第二平行四连杆机构共边。
10、根据本发明的实施例,还可以对本发明作进一步的优化,以下为优化后形成的技术方案:
11、在其中一个优选的实施例中,所述抓放机构固定在第四平行杆上,其包括抓放旋转电机减速机和夹具;所述抓放旋转电机减速机包括抓放旋转电机与抓放旋转减速机;所述抓放旋转电机的输出轴驱动抓放旋转减速机通过夹具传动机构带动夹具旋转。
12、在其中一个更优选的实施例中,所述夹具传动机构包括旋转连接座、连接套、旋转杆和推力轴承;所述抓放旋转减速机的输出端与连接套通过键传动连接,所述旋转连接座内套装有推力轴承,所述连接套套装在推力轴承内,所述连接套下端与旋转杆固定连接,旋转杆底部与夹具固定连接;所述抓放旋转电机驱动抓放旋转减速机、连接套、旋转杆旋转而带动夹具旋转;所述旋转连接座与第四平行杆固定连接。
13、在其中一个优选的实施例中,所述升降平台装置包括底座、第一套筒、第二套筒、动力提升装置和导向装置;所述底座与第一套筒固定连接,所述动力提升装置的一端与底座固定连接,该动力提升装置的另一端安装在第二套筒上,所述第一套筒和所述第二套筒之间设有竖向布置的导向装置。
14、在其中一个更优选的实施例中,所述导向装置包括安装在第一套筒内壁的滑轨和安装在第二套筒外壁的滑块;所述滑轨和滑块配合导向。
15、在其中一个更优选的实施例中,所述动力提升装置包括提升电机和由提升电机输出端驱动的提升电机减速机;所述提升电机减速机的输出端与第一同步带轮通过键传动连接,第一同步带轮与第二同步带轮通过同步带传动连接,第二同步带轮输出端与螺套通过键传动连接;所述螺套内螺纹连接有螺杆,螺杆上端套装有浮动接头,所述浮动接头与第二套筒的一端铰接相连。
16、在其中一个优选的实施例中,所述升降平台装置顶部固定安装有旋转装置,所述旋转装置包括减速机及旋转装置电机;所述减速机的外壳与第二套筒固定连接,减速机的动力输出端与大臂支座传动连接,减速机输入端与旋转装置电机传动连接。
17、在其中一个优选的实施例中,所述第一小臂连杆、第二小臂连杆、小臂机构的一段和大臂机构形成的四连杆机构为平行四连杆结构。
18、在其中一个优选的实施例中,所述第二平行杆旋转轴兼作第一平行杆与第二平行杆的转动轴。这种情况下,所述第二平行杆、第三平行杆、第四平行杆和小臂机构形成第二平行四连杆机构。
19、与现有技术相比,本发明的有益效果是:
20、1、本发明的旋转装置设置在升降平台装置与机械臂中间,减少了旋转装置的负载、扭矩,即其旋转惯量。
21、2、本发明的小臂电机减速机安装在大臂支座上,减少了小臂机构的自身重量,同时减少了大臂机构的旋转惯量;同时减少了小臂机构对大臂机构的作用扭矩,减少了大臂机构的负载;还减少了旋转装置的扭矩,减少了升降平台装置的翻转力矩;最后这种设计便于安装及走线、外形小巧、运动空间干涉少。
22、3、本发明采用两个共边的平行四连杆机构,这样其中一个平行四边形的一边角度与水平面保持不变,那么另一个平行四边对应的一边的角度也与水平面的角度保持不变,在运动过程中,两个平行四边形相互牵制,保证了抓取面的角度不变,节省了控制角度的电机、降低了负载。
- 还没有人留言评论。精彩留言会获得点赞!