一种基于目标检测与轨迹辨识的自动门控制方法
本发明属于自动门开闭控制,具体涉及一种基于目标检测与轨迹辨识的自动门控制方法。
背景技术:
1、传统的自动门控制系统中一般使用红外热释电传感器,红外热释电传感器主要用于探测其感应范围内人体发出的红外热辐射,将热辐射转化为电信号后输出给后续的控制模块。红外热释电传感器感应范围有限,易受粉尘或其他障碍物遮挡,同时极易受环境温度或其他热源干扰并产生误报。此外,红外热释电传感器仅能通过热辐射判断是否有物体存在,无法明确探测到的物体类别且无法还原物体精确的运动轨迹。
2、除热释电传感器外,部分自动门门禁系统基于毫米波雷达进行控制。虽然毫米波雷达探测距离相对较远,且不受环境、温度等因素的干扰,但存在由电磁噪声引起的虚警问题。同时,毫米波雷达无法辨识物体种类,价格也相对较高。
3、此外,传统的自动门控制系统控制逻辑简单,往往仅依靠热释电传感器或毫米波雷达信号进行简单的开闭操作,无法实现特定复杂环境下自动门的可靠控制,无力满足未来数字化楼宇潜在的智能化需求。
4、相比于传统的自动门控制方法,使用视觉摄像头进行信息采集,运用一定的技术手段进行处理,并在此基础上设计自动门的开闭控制方法,一方面可对视场中的物体进行目标检测,区分不同目标,仅对行人目标进行反应,减少其他物体对控制系统的干扰,大大提升系统安全性。另一方面,可以利用跟踪器对行人目标进行跟踪,形成完整的运动轨迹,从而判断其意图,降低自动门的误开率,减少资源浪费与机械损耗。
技术实现思路
1、有鉴于此,本发明的目的是提供一种基于目标检测与轨迹辨识的自动门控制方法,可以实现自动门开启与闭合的高效控制。
2、一种基于目标检测与轨迹辨识的自动门控制方法,包括如下步骤:
3、步骤1:实时拍摄自动门前区域的图像;
4、步骤2:对于步骤1拍摄的图像进行目标检测,对于检测到的目标,标记出其类别及边界框,并筛选出行人目标,根据其边界框坐标输出各行人目标的质心坐标;
5、步骤3:根据步骤2检测出的行人目标的质心坐标,形成各行人目标的运动轨迹;
6、步骤4:首先对自动门前区域的图像进行分区,包括跟踪区、判定区与占用区;其次,基于行人目标所处的区域以及行人目标运动轨迹,根据设定的策略,向自动门发出相应的控制信号;
7、步骤5:根据步骤4给出的控制信号,以设定的控制策略控制自动门的开闭动作。
8、较佳的,所述步骤1中,采用对角线视场角为120°的广角无畸变高清相机安装在自动门上方门框居中位置,俯视门前区域。
9、较佳的,所述步骤2中,采用基于mobilenet-v2轻量化神经网络的ssds目标检测算法进行目标检测。
10、较佳的,所述步骤3中,在得到图像中所有检测出的行人目标的质心坐标后,对每个行人目标赋予唯一的id;在下一帧图像到来后,计算两帧间各目标质心之间的相对欧氏距离;通过选取两帧间欧式距离最小的两个目标,判断出下一帧中各目标对应的id,从而确定各目标对应的运动方向。
11、较佳的,所述步骤4中,所述跟踪区为整个画面中除占用区与判定区以外的部分;
12、所述占用区为自动门下可能会发生碰撞、挤压的部分区域;
13、所述判定区为自动门的一部分扇形区域。
14、较佳的,所述步骤4中,根据设定的策略,向自动门发出相应的控制信号具体为:
15、若检测到有行人位于跟踪区,获取该行人目标的轨迹,辨识出具有进入趋势后,发出开门信号;
16、若检测到有行人位于占用区,则持续发出占用信号;
17、若检测到行人目标进入判定区时,调取该行人目标的轨迹进行辨识,辨识具有进入趋势后,将会发出开门信号,电机开始带动自动门打开。
18、较佳的,所述步骤4中,判断行人目标是否有进入趋势的策略为:当行人目标进入判定区后,提取出该目标在判定区中的坐标同时提取出该目标对应id下的所有历史质心坐标求所有质心纵坐标的均值,计算公式为:
19、
20、其中,t为历史检测出该目标的总帧数;
21、当大于设定阈值时,则判定该行人目标有进入趋势。
22、较佳的,所述步骤5中,所述设定的控制策略为:
23、(1)当接收到开门信号后,控制自动门打开,进入一段等候时间,待等候时间结束后,控制进行关门操作;
24、(2)在等候时间内,若接收到新的开门信号,则重置等候时间,待等候时间结束后,控制进行关门操作;
25、(3)在等候时间内,若接收到占用信号,则重置等候时间。
26、较佳的,所述目标检在轻量化的神经网络模型中实现。
27、本发明具有如下有益效果:
28、本发明提供一种基于目标检测与轨迹辨识的自动门控制方法,首先甄别门前经过物体的类别,其次对筛选出的行人目标进行跟踪并形成运动轨迹,最后通过行人轨迹分辨出存在进入意图的行人目标,从而实现自动门开启与闭合的高效控制;本发明使用广角单目rgb视觉相机作为控制系统输入,相机安装在自动门顶某特定位置,不受温度,气候以及粉尘等因素影响,且视场角广,视场范围大,能够采集到自动门较大范围内的实时图像;本发明使用部署在轻量化神经网络mobilenet-v2上的ssds目标检测算法,可以有效甄别自动目前物体的种类,仅对行人目标做出反应,可以有效屏蔽机动车、动物等其他物体的干扰,提升整个系统的安全性与可靠性;本发明使用质心跟踪算法对行人目标进行跟踪并形成运动轨迹,对进入检测区的行人的轨迹进行分析判断,可以有效剔除无关行人(如经过或仅逗留等)的干扰,有效提升控制系统的智能化程度,减少自动门的无效开合次数,有利于节能环保并减少了开合机构的机械损耗;在图像画面中设置占用区,当占用区中存在行人目标时发出占用指令,可以有效减少自动门夹人等事故出现的概率,提升系统安全性。
技术特征:
1.一种基于目标检测与轨迹辨识的自动门控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于目标检测与轨迹辨识的自动门控制方法,其特征在于:所述步骤1中,采用对角线视场角为120°的广角无畸变高清相机安装在自动门上方门框居中位置,俯视门前区域。
3.根据权利要求1所述的一种基于目标检测与轨迹辨识的自动门控制方法,其特征在于:所述步骤2中,采用基于mobilenet-v2轻量化神经网络的ssds目标检测算法进行目标检测。
4.根据权利要求1所述的一种基于目标检测与轨迹辨识的自动门控制方法,其特征在于:所述步骤3中,在得到图像中所有检测出的行人目标的质心坐标后,对每个行人目标赋予唯一的id;在下一帧图像到来后,计算两帧间各目标质心之间的相对欧氏距离;通过选取两帧间欧式距离最小的两个目标,判断出下一帧中各目标对应的id,从而确定各目标对应的运动方向。
5.根据权利要求1所述的一种基于目标检测与轨迹辨识的自动门控制方法,其特征在于:所述步骤4中,所述跟踪区为整个画面中除占用区与判定区以外的部分;
6.根据权利要求5所述的一种基于目标检测与轨迹辨识的自动门控制方法,其特征在于:所述步骤4中,根据设定的策略,向自动门发出相应的控制信号具体为:
7.根据权利要求6所述的一种基于目标检测与轨迹辨识的自动门控制方法,其特征在于:所述步骤4中,判断行人目标是否有进入趋势的策略为:当行人目标进入判定区后,提取出该目标在判定区中的坐标同时提取出该目标对应id下的所有历史质心坐标求所有质心纵坐标的均值,计算公式为:
8.根据权利要求7所述的一种基于目标检测与轨迹辨识的自动门控制方法,其特征在于:所述步骤5中,所述设定的控制策略为:
9.如权利要求1所述的一种基于目标检测与轨迹辨识的自动门控制方法,其特征在于,所述目标检在轻量化的神经网络模型中实现。
技术总结
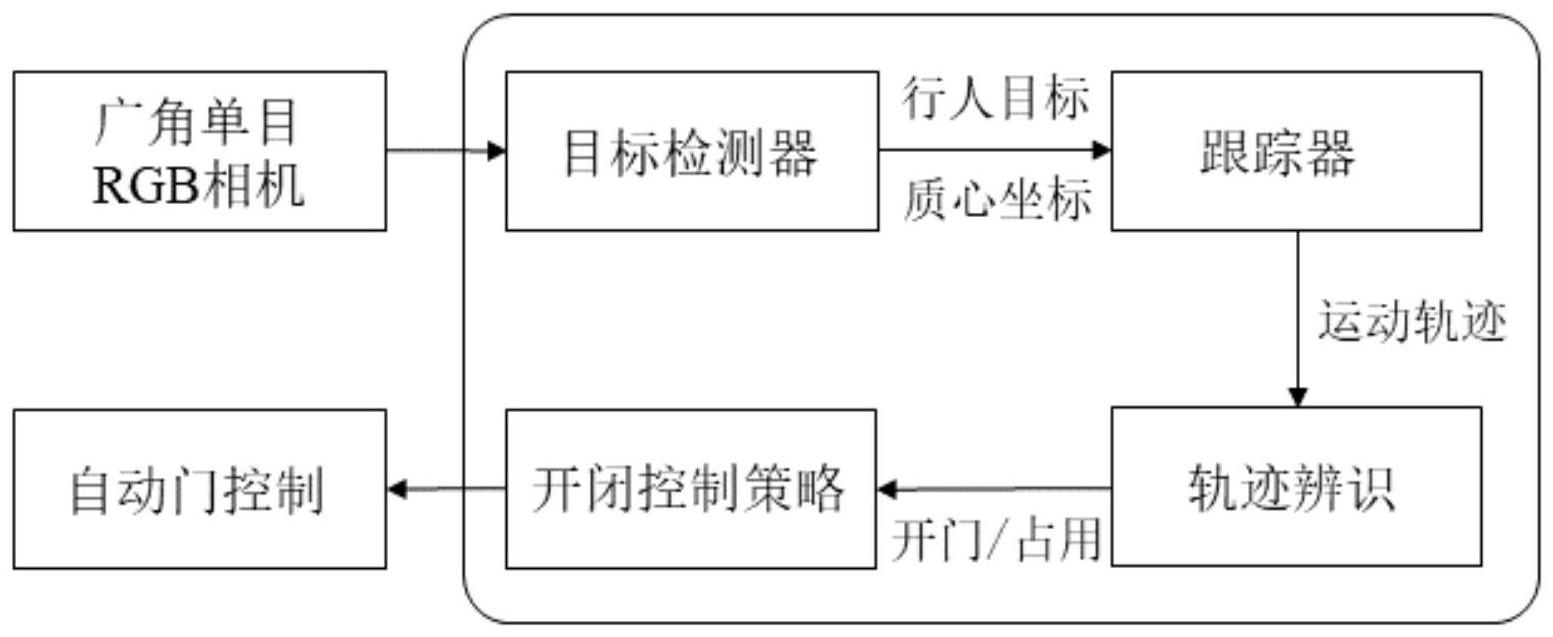
本发明提供了一种基于目标检测与轨迹辨识的自动门控制方法,属于自动门开闭控制技术领域;针对现有自动门控制系统的不足,提供了一种使用视觉摄像头的自动门控制方法,首先甄别门前经过物体的类别,其次对筛选出的行人目标进行跟踪并形成运动轨迹,最后通过轨迹分辨出存在进入意图的行人目标,从而实现自动门开启与闭合的高效控制。该方法首先采用广角相机实时拍摄门前区域,作为控制方法的输入信息;其次在轻量化的神经网络模型中运行目标检测算法以筛选出行人目标,并将目标的质心坐标输入跟踪器;跟踪器形成各目标的运动轨迹后再进行轨迹辨识,最后根据轨迹辨识结果以一定策略控制电机以完成自动门的开闭动作。
技术研发人员:杨毅,朱春晖,孙润东,董志鹏,梁浩
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!