一种可调节机械夹爪
本发明涉及机械夹爪领域,尤其涉及夹爪的夹取与放下。
背景技术:
1、机械夹爪以气动夹爪为基础,将传统的气压驱动,改为直接用电机驱动齿轮,从而带动齿条的对向运动控制夹爪的开闭。可选伺服步进控制,控制简单,成本经济。相对气爪的动作一步到位,机械夹爪不仅可以精确多段控制开闭行程及速度,在选用伺服控制时也可精准长行程、夹持力都是具备可调,支持与市面上所有主流协作机器人品牌即插即用,系统内提供图形化插件,易于控制与编程。应用于机器人自动上下料,搬运等工段时,兔掉了气路设计,减少了机器人本体负担,使用更灵活简单。
2、目前的市面上存在的机械夹爪大多是固定夹爪数,且只能夹取特定的工件。因此设计了一款可调节机械夹爪用来应对多种复杂形状的工件,同时可根据需求,对夹取工件的形状,对夹爪进行安装与拆卸,使其在夹取与放下的过程中更为可靠,从而填补了机械夹爪技术的相关空缺。
技术实现思路
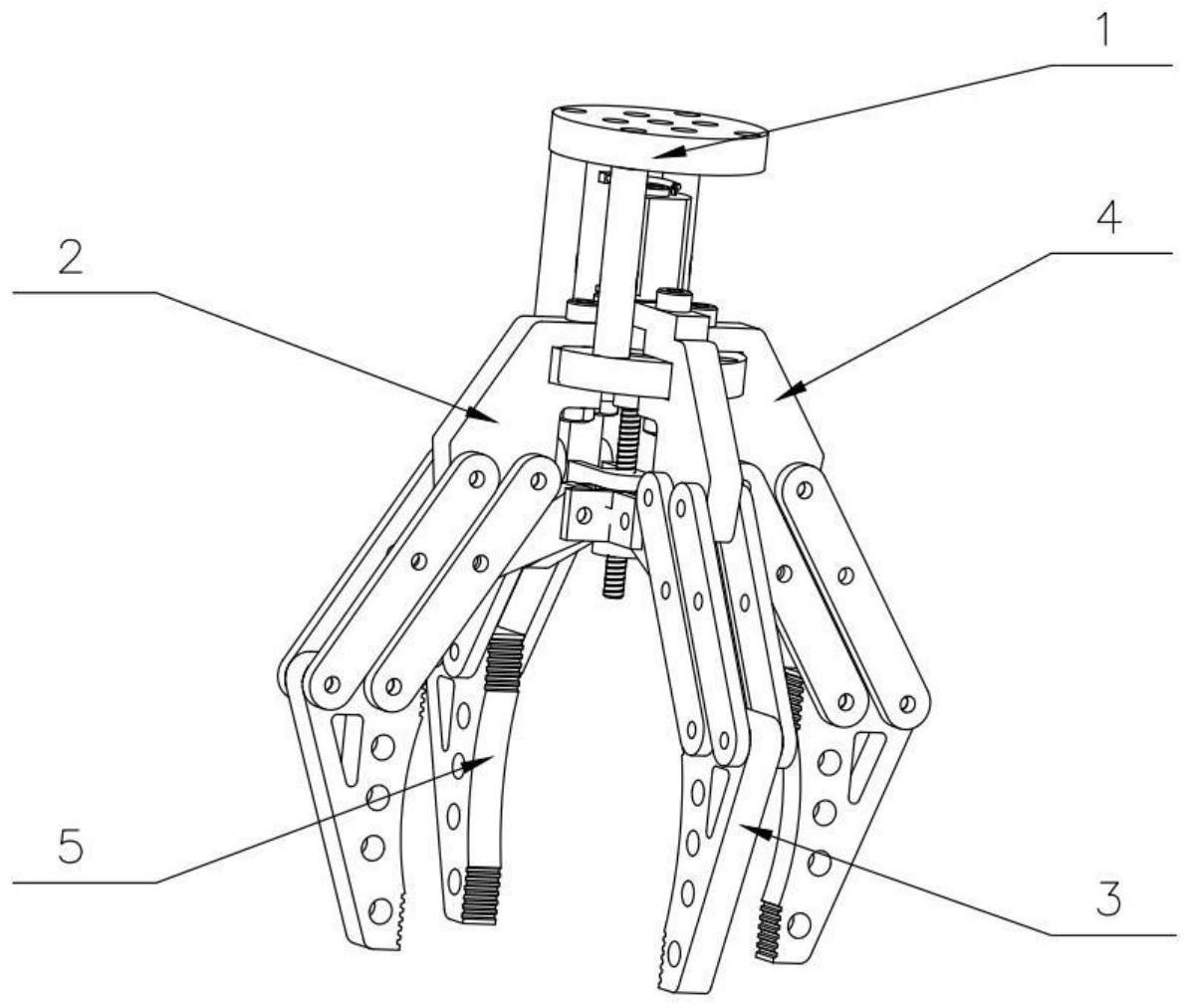
1、本发明所设计的一种可调节机械夹爪,其包括固定模块(1)、固定夹爪(2)、可调夹爪a(3)、可调夹爪b(4)和可调夹爪c(5),固定夹爪(2)与固定模块(1)通过螺栓连接和凹凸拼接实现固定,可调夹爪a(3)、可调夹爪b(4)和可调夹爪c(5)均与固定模块(1)通过螺栓连接和同心圆定位实现调节;
2、进一步的,所述固定模块由底座(1-1)、支撑柱a(1-2)、支撑柱b(1-3)、支撑柱c(1-4)、连接板(1-5)、电机(1-6)、螺纹杆(1-7)、螺栓a(1-8)、螺栓b(1-9)和键(1-10)组成;支撑柱a(1-2)、支撑柱b(1-3)、支撑柱c(1-4)的顶端均使用螺栓a(1-8)与底座(1-1)相连,实现固定;支撑柱a(1-2)、支撑柱b(1-3)、支撑柱c(1-4)的底端均使用螺栓a(1-8)与连接板(1-5)相连,实现固定;电机(1-6)的前端与连接板(1-5)通过螺栓b(1-9)实现固定;螺纹杆(1-7)一端设有固定深度的内孔,与电机(1-6)的输出轴通过键连接实现固定;
3、进一步的,所述固定夹爪由固定块a(2-1)、连杆a(2-2)、连杆b(2-3)、爪子(2-4)、垫片(2-5)、滑块a(2-6)、螺栓(2-7)和螺母(2-8)组成;滑块a(2-6)一端为圆弧,圆弧端侧向的中间部分设有固定深度的凹形槽;滑块a(2-6)另一端为非圆弧,非圆弧端侧向的中间部分设有固定深度的凹形槽;固定块aa(2-1)插入连接板(1-5)的凹槽处,并使用螺栓(2-7)和螺母(2-8)连接,实现固定块a的固定;在固定块a(2-1)的两侧分别有两对连杆a(2-2),孔位对准,使用销连接;在靠近螺栓(2-7)侧的一对连杆a(2-2)之间用销连接连杆b(2-3)的一端,且连杆b的两侧有垫片(2-5)支撑;连杆b(2-3)的另一端用销连接滑块a(2-6)的非圆弧端的凹槽处;滑块a(2-6)的圆弧端c设有螺纹孔,可与螺纹杆(1-7)进行螺纹连接;
4、进一步的,所述可调夹爪a由固定块b(3-1)、连杆a(2-2)、连杆b(2-3)、爪子(2-4)、垫片(2-5)、滑块b(3-6)、螺栓(3-7)和螺母(2-8)组成;滑块b(3-6)一端为圆弧,圆弧端侧向的中间部分设有固定深度的凸形块,可与滑块b(2-6)的凹型槽进行配合,实现一起运动;滑块b(3-6)另一端为非圆弧,非圆弧端侧向的中间部分设有固定深度的凹形槽;固定块b(3-1)比固定块b(2-1)高一台阶,为防止两固定块b相撞;固定块b(3-1)插入连接板(1-5)的弧形处,并使用螺栓(3-7)和螺母(2-8)连接,实现固定块b的固定;固定块b(3-1)的顶部有一圆弧伸出端,可与连接板(1-5)的圆柱面接触,起定向作用;在固定块b(3-1)的两侧分别有两对连杆a(2-2),孔位对准,使用销连接;在靠近螺栓(3-7)侧的一对连杆a(2-2)之间用销连接连杆b(2-3)的一端,且连杆b的两侧有垫片(2-5)支撑;连杆b(2-3)的另一端用销连接滑块b(3-6)的非圆弧端的凹形槽处;滑块b(3-6)的圆弧端的圆心处设有螺纹孔,可与螺纹杆(1-7)进行螺纹连接;
5、进一步的,所述可调夹爪b由固定块c(4-1)、连杆a(2-2)、连杆b(2-3)、爪子(2-4)、垫片(2-5)、滑块c(4-6)、螺栓(2-7)和螺母(2-8)组成;滑块c(4-6)一端为圆弧,圆弧端的底部设有“l”状的固定深度的凸形块,可与滑块c(2-6)的底部进行配合,实现一起运动;滑块c(4-6)另一端为非圆弧,非圆弧端侧向的中间部分设有固定深度的凹形槽;固定块c(4-1)插入连接板(1-5)的弧形处,并使用螺栓(2-7)和螺母(2-8)连接,实现固定块c的固定;固定块c(4-1)的底部有一圆弧伸出端,可与连接板(1-5)的圆柱面接触,起定向作用;在固定块c(4-1)的两侧分别有两对连杆a(2-2),孔位对准,使用销连接;在靠近螺栓(3-7)侧的一对连杆a(2-2)之间用销连接连杆b(2-3)的一端,且连杆b的两侧有垫片(2-5)支撑;连杆b(2-3)的另一端用销连接滑块c(4-6)的非圆弧端的凹形槽处;滑块c(4-6)的圆弧端的圆心处设有螺纹孔,可与螺纹杆(1-7)进行螺纹连接;
6、进一步的,所述可调夹爪c由固定块d(5-1)、连杆a(2-2)、连杆b(2-3)、爪子(2-4)、垫片(2-5)、滑块d(5-6)、螺栓(2-7)和螺母(2-8)组成;滑块d(5-6)一端为圆弧,圆弧端的顶部设有“l”状的固定深度的凸形块,可与滑块d(2-6)的底部进行配合,实现一起运动;滑块d(5-6)另一端为非圆弧,非圆弧端侧向的顶部设有固定深度的凸形块;固定块d(5-1)插入连接板(1-5)的弧形处,并使用螺栓(2-7)和螺母(2-8)连接,实现固定块d的固定;固定块d(5-1)的顶部有一圆弧伸出端,可与连接板(1-5)的圆柱面接触,起定向作用;在固定块d(5-1)的两侧分别有两对连杆a(2-2),孔位对准,使用销连接;在靠近螺栓(2-7)侧的一对连杆a(2-2)之间用销连接连杆b(2-3)的一端,且连杆b的两侧有垫片(2-5)支撑;连杆b(2-3)的另一端用销连接滑块d(5-6)的非圆弧端的凹形槽处;滑块d(5-6)的圆弧端的圆心处设有螺纹孔,可与螺纹杆(1-7)进行螺纹连接;
7、进一步的,所述功能的实现流程如图7,首先将需要根据夹取工件形状,安装或拆除机械爪;根据工件外形,调整机械夹爪之间的角度,获得更为稳定的夹取方式;驱动电机(1-6)启停,带动螺纹杆(1-7)旋转;安装于螺纹杆(1-7)上的滑块实现上下运动;滑块的上下运动,带动连杆b(2-3)、连杆a(2-2)和爪子(2-4)运动;滑块的向上运动,实现爪子(2-4)的夹紧;滑块的向下运动,实现爪子(2-4)的松弛;由此实现对工件的夹取与放下;
8、进一步的,所述实现夹取圆形工件的示意图如图5;首先为了稳定的夹取圆形工件,可使用三点确定一个圆的原理,使用三个夹爪,固定夹爪(2)、可调夹爪a(3)、可调夹爪c(5);通过拆除螺栓(2-7)、螺母(2-8)和滑块(4-6),即可拆除可调夹爪b(4);再将可调夹爪a(3)按照连接板(1-5)上的刻度,调整可调夹爪a(3)的角度,拧紧螺栓(3-7)和螺母(2-8);再将可调夹爪c(5)按照连接板(1-5)上的刻度,调整可调夹爪c(5)的角度,拧紧螺栓(2-7)和螺母(2-8);
9、进一步的,所述实现夹取菱形工件的示意图如图6;首先为了稳定的夹取菱形工件,可使用四个夹爪,固定夹爪(2)、可调夹爪a(3)、可调夹爪b(4)、可调夹爪c(5);再将可调夹爪a(3)按照连接板(1-5)上的刻度,调整可调夹爪a(3)的角度,拧紧螺栓(3-7)和螺母(2-8);再将可调夹爪b(4)按照连接板(1-5)上的刻度,调整可调夹爪b(4)的角度,拧紧螺栓(2-7)和螺母(2-8);再将可调夹爪c(5)按照连接板(1-5)上的刻度,调整可调夹爪c(5)的角度,拧紧螺栓(2-7)和螺母(2-8);即可对菱形工件进行夹取与放下。
- 还没有人留言评论。精彩留言会获得点赞!