配网机器人作业工具路径标定方法、控制器、设备及介质与流程
本申请涉及机械臂标定,尤其涉及一种配网机器人作业工具路径标定方法、控制器、设备及介质。
背景技术:
1、随着高新技术的快速发展以及在各行业的落地应用,高空电力作业正在逐步由人工化转为自动化、智能化,从而达到电网公司减员增效降风险的要求。为了满足配网双臂机器人智能化作业需求,机器人通常需要用到两个机械臂携带不同的工具相互配合以进行电线的抓取、接引等操作,并且对于不同的工具还需要设计不同的动作进行作业,对于同一种工具也需要测试不同的工作动作以达到最佳作业效果。因此,需要标定机械臂的工作路径。
2、但是,现有技术中采用的机械臂工作路径标定方法还存在以下问题:
3、对于结构设计复杂的工具采用自动路径规划算法(如a*(a-star)、rrt(rapidly-explorring random tree,快速扩展随机树法)、prm(probabilistic road map,概率路图法)等)为机械臂计算路径,该方式需要对机器人提前进行建模,计算量大,计算效率和效果都不是很理想,得到的路径结果不稳定;在进行机器人工具测试时需要对同一种工具设计几种不同的结构用于验证,需要测试人员进行频繁的路径设计更换,以得到最合适的路径动作;普通的示教方式需要将机械臂末端运动到固定的目标点,再在目标点的基础上进行移动,每移动一次添加一个路径,但路径的保存是基于全局坐标系的坐标,若改变目标点,之前示教的路径将失效,需要重新在新目标点附近录入动作。
技术实现思路
1、本申请实施例提供了一种配网机器人作业工具路径标定方法、控制器、设备及介质,能够更加灵活的实现对配网机器人作业工具的路径标定。
2、第一方面,本申请实施例提供了一种配网机器人作业工具的路径标定方法,所述配网机器人作业工具的路径标定方法包括:
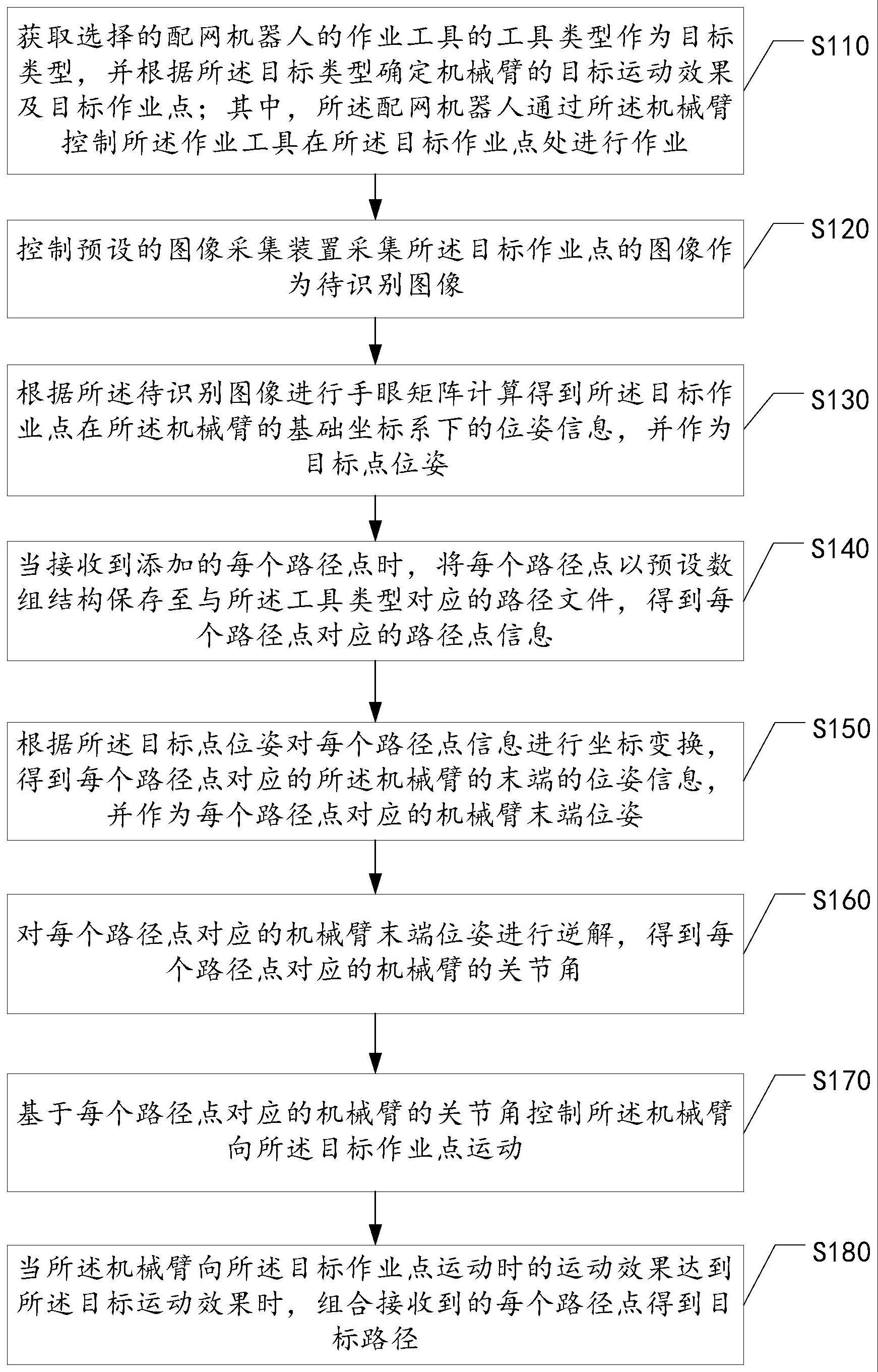
3、获取选择的配网机器人的作业工具的工具类型作为目标类型,并根据所述目标类型确定机械臂的目标运动效果及目标作业点;其中,所述配网机器人通过所述机械臂控制所述作业工具在所述目标作业点处进行作业;
4、控制预设的图像采集装置采集所述目标作业点的图像作为待识别图像;
5、根据所述待识别图像进行手眼矩阵计算得到所述目标作业点在所述机械臂的基础坐标系下的位姿信息,并作为目标点位姿;
6、当接收到添加的每个路径点时,将每个路径点以预设数组结构保存至与所述工具类型对应的路径文件,得到每个路径点对应的路径点信息;
7、根据所述目标点位姿对每个路径点信息进行坐标变换,得到每个路径点对应的所述机械臂的末端的位姿信息,并作为每个路径点对应的机械臂末端位姿;
8、对每个路径点对应的机械臂末端位姿进行逆解,得到每个路径点对应的机械臂的关节角;
9、基于每个路径点对应的机械臂的关节角控制所述机械臂向所述目标作业点运动;
10、当所述机械臂向所述目标作业点运动时的运动效果达到所述目标运动效果时,组合接收到的每个路径点得到目标路径。
11、第二方面,本申请实施例还提供了一种配网机器人作业工具的路径标定装置,所述配网机器人作业工具的路径标定装置包括:
12、确定单元,用于获取选择的配网机器人的作业工具的工具类型作为目标类型,并根据所述目标类型确定机械臂的目标运动效果及目标作业点;其中,所述配网机器人通过所述机械臂控制所述作业工具在所述目标作业点处进行作业;
13、控制单元,用于控制预设的图像采集装置采集所述目标作业点的图像作为待识别图像;
14、计算单元,用于根据所述待识别图像进行手眼矩阵计算得到所述目标作业点在所述机械臂的基础坐标系下的位姿信息,并作为目标点位姿;
15、保存单元,用于当接收到添加的每个路径点时,将每个路径点以预设数组结构保存至与所述工具类型对应的路径文件,得到每个路径点对应的路径点信息;
16、变换单元,用于根据所述目标点位姿对每个路径点信息进行坐标变换,得到每个路径点对应的所述机械臂的末端的位姿信息,并作为每个路径点对应的机械臂末端位姿;
17、逆解单元,用于对每个路径点对应的机械臂末端位姿进行逆解,得到每个路径点对应的机械臂的关节角;
18、所述控制单元,还用于基于每个路径点对应的机械臂的关节角控制所述机械臂向所述目标作业点运动;
19、组合单元,用于当所述机械臂向所述目标作业点运动时的运动效果达到所述目标运动效果时,组合接收到的每个路径点得到目标路径。
20、第三方面,本申请实施例还提供了一种控制器,所述控制器采用上述方法对配网机器人的机械臂进行控制。
21、第四方面,本申请实施例还提供了一种电子设备,其包括存储器,存储至少一个指令;及处理器,执行所述存储器中存储的指令以实现上述方法。
22、第五方面,本申请实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一个指令,所述至少一个指令被电子设备中的处理器执行以实现上述方法。
23、本申请实施例提供了一种配网机器人作业工具路径标定方法、控制器、设备及介质。具有以下有益效果:在对图像采集装置采集的待识别图像进行识别后,基于手眼矩阵计算得到目标作业点在机械臂的基础坐标系下的位姿信息作为目标点位姿,并以预设数组结构的相对坐标形式保存添加的每个路径点的路径点信息,根据目标点位姿对每个路径点信息进行坐标变换得到每个路径点对应的机械臂末端位姿,进一步对每个路径点对应的机械臂末端位姿进行逆解得到每个路径点对应的机械臂的关节角,并基于关节角控制机械臂向目标作业点运动,直至运动效果达到预期效果,得到每个路径点组成的目标路径,在标定过程中,路径点可以实时增删、修改,并且,由于是以相对坐标的形式保存路径,不同位置的作业点也能实现同样的动作,能够根据现场需求对工具的路径进行标定。
技术特征:
1.一种配网机器人作业工具的路径标定方法,其特征在于,所述配网机器人作业工具的路径标定方法包括:
2.如权利要求1所述的配网机器人作业工具的路径标定方法,其特征在于,所述方法还包括:
3.如权利要求1所述的配网机器人作业工具的路径标定方法,其特征在于,所述根据所述待识别图像进行手眼矩阵计算得到所述目标作业点在所述机械臂的基础坐标系下的位姿信息,并作为目标点位姿包括:
4.如权利要求1所述的配网机器人作业工具的路径标定方法,其特征在于:
5.如权利要求1所述的配网机器人作业工具的路径标定方法,其特征在于,所述根据所述目标点位姿对每个路径点信息进行坐标变换,得到每个路径点对应的所述机械臂的末端的位姿信息,并作为每个路径点对应的机械臂末端位姿包括:
6.如权利要求1所述的配网机器人作业工具的路径标定方法,其特征在于,所述机械臂向所述目标作业点运动时的运动效果达到所述目标运动效果包括:
7.如权利要求1所述的配网机器人作业工具的路径标定方法,其特征在于,所述组合接收到的每个路径点得到目标路径后,所述方法还包括:
8.一种控制器,其特征在于,所述控制器采用如权利要求1-7任一项所述的方法对配网机器人的机械臂进行控制。
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于:所述计算机可读存储介质中存储有至少一个指令,所述至少一个指令被电子设备中的处理器执行以实现如权利要求1至7中任意一项所述的配网机器人作业工具的路径标定方法。
技术总结
本申请实施例公开了一种配网机器人作业工具路径标定方法、控制器、设备及介质,能够以预设数组结构的相对坐标形式保存添加的每个路径点的路径点信息,根据目标点位姿对每个路径点信息进行坐标变换得到每个路径点对应的机械臂末端位姿,进一步对每个路径点对应的机械臂末端位姿进行逆解得到每个路径点对应的机械臂的关节角,并基于关节角控制机械臂向目标作业点运动,直至运动效果达到预期效果,得到每个路径点组成的目标路径,在标定过程中,路径点可以实时增删、修改,并且,由于是以相对坐标的形式保存路径,不同位置的作业点也能实现同样的动作,能够根据现场需求对工具的路径进行标定。
技术研发人员:黄逸宁,施永刚,孙琰,陈志忠,张航,耿建宇,闫旭,李雪峰,杨钧砚,何昊,韩冬
受保护的技术使用者:国网吉林省电力有限公司长春供电公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!