一种多轴运动平台运动学参数标定方法和系统
本发明涉及机器人参数标定,尤其涉及一种多轴运动平台运动学参数标定方法和系统。
背景技术:
1、多轴运动平台的运动学标定即手眼标定,手眼标定是将相机三维坐标转化为机械臂坐标需要标定相机与机械臂之间的位置关系。传统的多轴运动平台或机械臂的运动学标定方法多采用球杆仪、激光跟踪仪等高精度位姿测量设备来实现,这些设备用于运动学标定虽然可以获得较好的结果,但是存在效率低下且成本高昂的问题,不易于实现运动学标定的自动化。
2、为了实现低成本且自动化的运动学标定,目前采用工业相机搭配标定板作为位姿测量设备,但是这种方法在运动学模型误差参数辨识的过程中,由于位置与姿态量纲不一的问题,导致在进行误差参数辨识时容易产生趋向性,影响最终标定结果的准确度。例如专利申请号为cn202010398022.3,名称为一种适用于全构型的空间机械臂运动学参数在轨标定方法的专利技术方案中,较好地使用了工业相机替代了激光跟踪仪等设备,实现了多轴运动平台的运动学标定,但是该技术方案中,得到的机械臂末端位姿测量值与标称值均是形如m4×4的矩阵,该矩阵内包含了r3×3的姿态信息矩阵与t1×3的位置信息矩阵,其机械臂末端的位姿偏差矩阵(残差矩阵)也是由测量值对应的矩阵与标称值对应的矩阵经过数学处理后相减得来。所以残差矩阵中既包含位置量(单位是长度)也包含姿态量(单位是角度)。使用最小二乘等方法进行参数辨识时,其辨识的数学意义是迭代寻找使残差矩阵各项的平方和最小时的误差参数,其物理意义是寻找使平台末端位姿测量值与标称值最接近的误差参数。但因为角度与长度单位不统一(量纲不一),导致参数辨识时容易产生趋向性,最终影响参数辨识结果,即影响运动学标定准确性。
技术实现思路
1、本发明实施例提供了一种多轴运动平台运动学参数标定方法和系统,用于解决现有的多轴运动平台运动学参数标定方法因位置与姿态量纲不一,导致在进行误差参数辨识时容易产生趋向性,影响最终标定结果的准确度的技术问题。
2、有鉴于此,本发明第一方面提供了一种多轴运动平台运动学参数标定方法,包括:
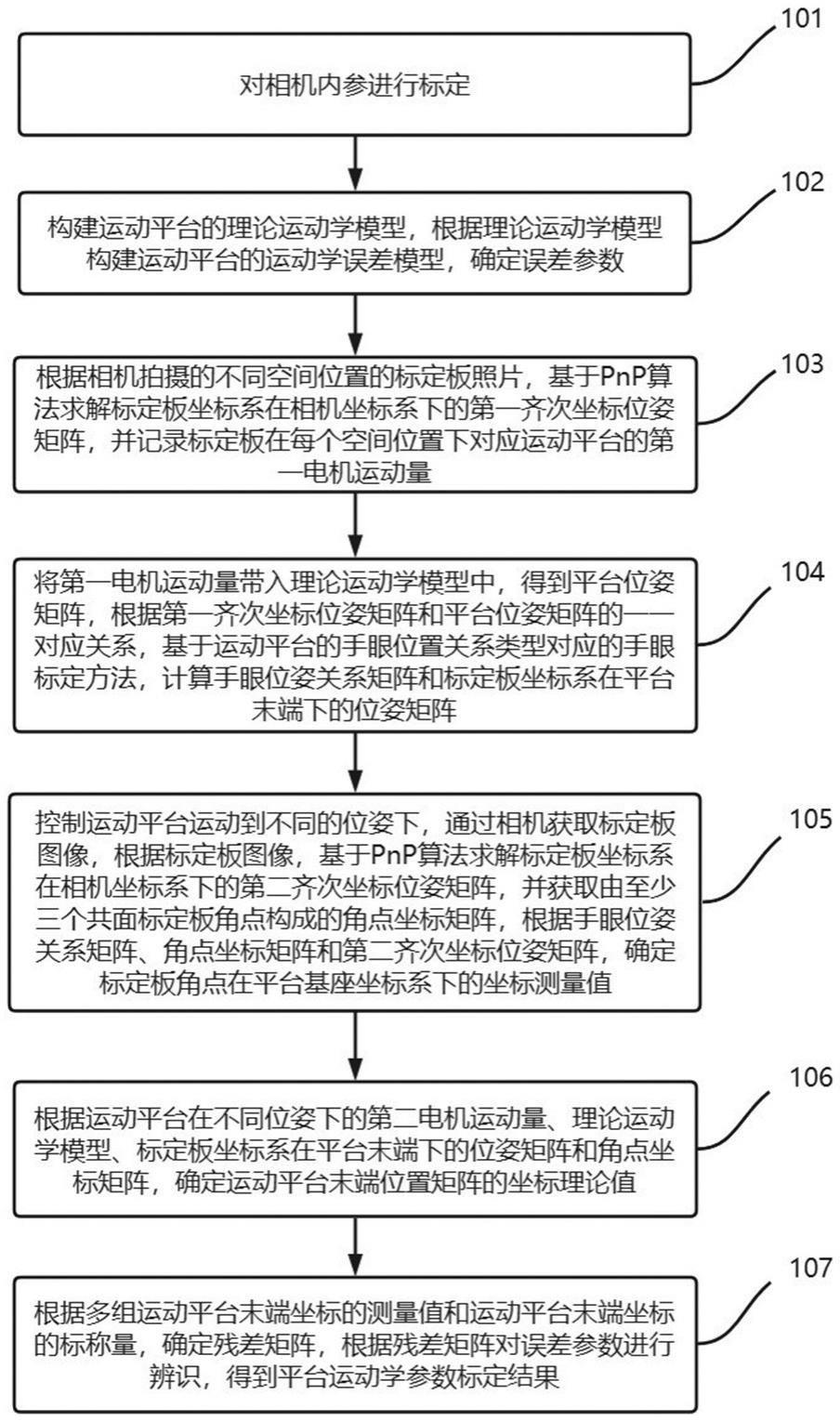
3、对相机内参进行标定;
4、构建运动平台的理论运动学模型,根据理论运动学模型构建运动平台的运动学误差模型,确定误差参数;
5、根据相机拍摄的不同空间位置的标定板照片,基于pnp算法求解标定板坐标系在相机坐标系下的第一齐次坐标位姿矩阵,并记录标定板在每个空间位置下对应运动平台的第一电机运动量;
6、将第一电机运动量带入理论运动学模型中,得到平台位姿矩阵,根据第一齐次坐标位姿矩阵和平台位姿矩阵的一一对应关系,基于运动平台的手眼位置关系类型对应的手眼标定方法,计算手眼位姿关系矩阵和标定板坐标系在平台末端下的位姿矩阵;
7、控制运动平台运动到不同的位姿下,通过相机获取标定板图像,根据标定板图像,基于pnp算法求解标定板坐标系在相机坐标系下的第二齐次坐标位姿矩阵,并获取由至少三个共面标定板角点构成的角点坐标矩阵,根据手眼位姿关系矩阵、角点坐标矩阵和第二齐次坐标位姿矩阵,确定标定板角点在平台基座坐标系下的坐标测量值;
8、根据运动平台在不同位姿下的第二电机运动量、理论运动学模型、标定板坐标系在平台末端下的位姿矩阵和角点坐标矩阵,确定运动平台末端位置矩阵的坐标理论值;
9、根据多组运动平台末端坐标的测量值和运动平台末端坐标的标称量,确定残差矩阵,根据残差矩阵对误差参数进行辨识,得到平台运动学参数标定结果。
10、可选地,根据多组运动平台末端坐标的测量值和运动平台末端坐标的标称量,确定残差矩阵,根据残差矩阵,对误差参数进行辨识,得到平台运动学参数标定结果,包括:
11、根据多组运动平台末端坐标的测量值和运动平台末端坐标的标称量,确定残差矩阵,根据残差矩阵,使用lm算法或信赖域算法对误差参数进行辨识,得到平台运动学参数标定结果。
12、可选地,对相机内参进行标定包括:
13、通过相机采集不同空间位置的标定板照片,采用张正友标定法对相机内参进行标定。
14、可选地,标定板坐标系在平台末端下的位姿矩阵的计算公式为:
15、;
16、其中,为标定板坐标系在平台末端下的位姿矩阵,为平台位姿矩阵,为手眼位姿关系矩阵,为第一齐次坐标位姿矩阵。
17、可选地,确定标定板角点在平台基座坐标系下的坐标测量值的计算公式为:
18、;
19、其中,为标定板上的点在平台基座坐标系下的坐标测量值,为标定板的角点坐标矩阵,为第二齐次坐标位姿矩阵。
20、可选地,确定运动平台末端位置矩阵的坐标理论值的计算公式为:
21、;
22、其中,为运动平台末端位置矩阵的坐标理论值。
23、本发明第二方面还提供了一种多轴运动平台运动学参数标定系统,包括:
24、相机内参标定模块,用于对相机内参进行标定;
25、误差模型构建模块,用于构建运动平台的理论运动学模型,根据理论运动学模型构建运动平台的运动学误差模型,确定误差参数;
26、第一矩阵求解模块,用于根据相机拍摄的不同空间位置的标定板照片,基于pnp算法求解标定板坐标系在相机坐标系下的第一齐次坐标位姿矩阵,并记录标定板在每个空间位置下对应运动平台的第一电机运动量;
27、第二矩阵求解模块,用于将第一电机运动量带入理论运动学模型中,得到平台位姿矩阵,根据第一齐次坐标位姿矩阵和平台位姿矩阵的一一对应关系,基于运动平台的手眼位置关系类型对应的手眼标定方法,计算手眼位姿关系矩阵和标定板坐标系在平台末端下的位姿矩阵;
28、标定板坐标测量值求解模块,用于控制运动平台运动到不同的位姿下,通过相机获取标定板图像,根据标定板图像,基于pnp算法求解标定板坐标系在相机坐标系下的第二齐次坐标位姿矩阵,并获取由至少三个共面标定板角点构成的角点坐标矩阵,根据手眼位姿关系矩阵、角点坐标矩阵和第二齐次坐标位姿矩阵,确定标定板角点在平台基座坐标系下的坐标测量值;
29、标定板坐标理论值求解模块,用于根据运动平台在不同位姿下的第二电机运动量、理论运动学模型、标定板坐标系在平台末端下的位姿矩阵和角点坐标矩阵,确定运动平台末端位置矩阵的坐标理论值;
30、误差参数辨识模块,用于根据多组运动平台末端坐标的测量值和运动平台末端坐标的标称量,确定残差矩阵,根据残差矩阵对误差参数进行辨识,得到平台运动学参数标定结果。
31、可选地,误差参数辨识模块具体用于:
32、根据多组运动平台末端坐标的测量值和运动平台末端坐标的标称量,确定残差矩阵,根据残差矩阵,使用lm算法或信赖域算法对误差参数进行辨识,得到平台运动学参数标定结果。
33、可选地,相机内参标定模块具体用于:
34、通过相机采集不同空间位置的标定板照片,采用张正友标定法对相机内参进行标定。
35、可选地,标定板坐标系在平台末端下的位姿矩阵的计算公式为:
36、;
37、其中,为标定板坐标系在平台末端下的位姿矩阵,为平台位姿矩阵,为手眼位姿关系矩阵,为第一齐次坐标位姿矩阵;
38、确定标定板角点在平台基座坐标系下的坐标测量值的计算公式为:
39、;
40、其中,为标定板上的点在平台基座坐标系下的坐标测量值,为标定板的角点坐标矩阵,为第二齐次坐标位姿矩阵;
41、确定运动平台末端位置矩阵的坐标理论值的计算公式为:
42、;
43、其中,为运动平台末端位置矩阵的坐标理论值。
44、从以上技术方案可以看出,本发明提供的本发明提供的多轴运动平台运动学参数标定方法和系统具有以下优点:
45、本发明提供的多轴运动平台运动学参数标定方法,在标定相机内参后,建立平台运动学误差模型确定误差参数,再根据平台与相机的位置关系,采集不同空间位置下的标定板图像,记录相应的电机运动量,求解出手眼位姿关系矩阵和标定板坐标系在平台末端下的位姿矩阵,根据由至少三个共面标定板角点构成的角点坐标矩阵和手眼位姿关系矩阵求解出标定板角点在平台基座坐标系下的坐标测量值,根据由至少三个共面标定板角点构成的角点坐标矩阵和标定板坐标系在平台末端下的位姿矩阵求解出运动平台末端位置矩阵的坐标理论值,根据测量值和理论值确定残差矩阵,利用残差矩阵对误差参数进行辨识,完成平台运动学参数标定。本发明通过测量标定板至少三点的位置量,取代了传统的测量标定板一点的位置姿态量的方式,避免了在参数辨识时因位置量与姿态量量纲不一致导致的参数辨识不准确的问题,充分发挥了相机测量相较于激光跟踪仪等设备测量的优势,即同一时刻可完成空间多点位置测量,为平台运动学标定结果精度带来了实质性的提升。解决了现有的多轴运动平台运动学参数标定方法因位置与姿态量纲不一,导致在进行误差参数辨识时容易产生趋向性,影响最终标定结果的准确度的技术问题。
46、本发明提供的多轴运动平台运动学参数标定系统,用于执行本发明提供的多轴运动平台运动学参数标定方法,其原理和所取得的技术效果与本发明提供的多轴运动平台运动学参数标定方法相同,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!