一种碳纤维机器人手臂的制作方法
本发明涉及碳纤维机械臂设计,具体为一种碳纤维机器人手臂。
背景技术:
1、目前自动化行业和机器人行业的集成度越来越高,对体积,重量等要求越来越高,越来越精致,以上装置从材质和结构形式上存在较大差异,且对目前应用较广泛的自动化行业及机器人行业的应用上显现的许多的弊端,如过于笨重,噪音过大,外形尺寸无法满足使用要求等;
2、多节伸缩套管机械臂,作为自动化机器人行业的一种运动延伸机械臂,其应用范围越来越广泛。通过多节套管作为运动延伸机构,增加自动化控制的作业区域,机器人行走及监测的区域化,从而提高自动控制的可变性,机器人应用环境的广泛性。基于该机构的应用领域的不断增加,对该机构的要求随着不同领域及环境功能的要求提高而在不断的改变。
3、有的技术比较成熟的伸缩装置多为单杆的电动伸缩杆,以及多节电动伸缩杆,该结构多为金属结构件;另外一种为铝合金套管伸缩机构,该机构市场使用率目前还比较低。现有伸缩结构,大部分采用齿轮带动丝杆的方式,通过电机带动齿轮,连接丝杆组件,实现丝杆的旋转上升和下降,实现伸缩的目的。该结构形式主要的缺点为对行程要求较高,外形尺寸过大,经常无法满足小型化的集成设备,并且使用齿轮传动,其噪音相对较大。另外一种使用丝杆套管式的结构,由于丝杆本身无法径向负载,需要使用增加外套管,这种结构形式体积庞大,重量较大,使用范围相对较小。
技术实现思路
1、本发明的目的在于提供一种碳纤维机器人手臂,以解决上述背景技术中提出的问题。
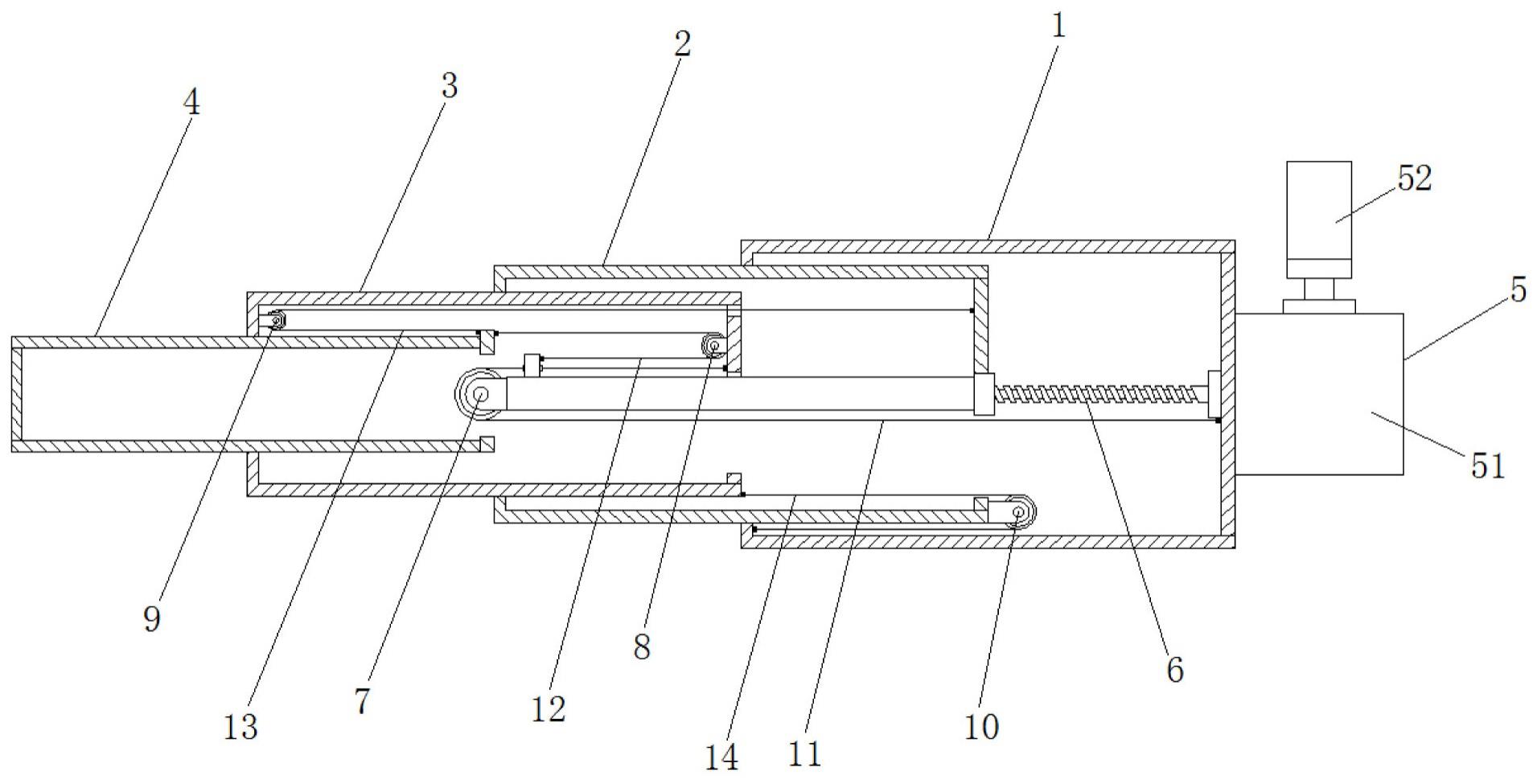
2、为实现上述目的,本发明提供如下技术方案:一种碳纤维机器人手臂,包括:第一套筒、第二套筒、第三套筒、第四套筒、驱动机构、伸缩机构、第一定滑轮、第二定滑轮、第三定滑轮、第四定滑轮、第一拉动绳、第二拉动绳、第三拉动绳、第四拉动绳,所述的第一套筒、第二套筒、第三套筒、第四套筒由外至内依次套接,且套筒的截面呈正多边形,所述的驱动机构固接在第一套筒底圈的外侧,所述的伸缩机构设置在第一套筒底圈内侧的中心位置,且伸缩机构输入端与驱动机构输出端连接,所述的第一定滑轮固接在伸缩机构的顶端,所述的第一拉动绳绕过第一定滑轮,且第一拉动绳两端分别连接第一套筒底圈与第三套筒底圈,所述的第二定滑轮设置在第三套筒的底圈上,所述的第二拉动绳绕过第二定滑轮,且第二拉动绳两端分别连接在伸缩机构顶端与第四套筒底端,所述的第三定滑轮设置在第三套筒顶圈上,所述的第三拉动绳绕过第三定滑轮,且第三拉动绳两端分别连接在第四套筒底圈与第二套筒底圈,所述的第四定滑轮固接在第二套筒底圈上,所述的第四拉动绳绕过第四定滑轮,且第四拉动绳两端分别连接在第一套筒顶圈与第三套筒底圈。
3、进一步的,所述的伸缩机构包括驱动丝杆、伸缩套筒、驱动螺纹块,所述的驱动丝杆通过轴承座设置在第一套筒底圈中心位置,所述的伸缩套筒套接在驱动丝杆外部,所述的驱动螺纹块固接在伸缩套筒底部,且驱动螺纹块通过螺纹与驱动丝杆连接。
4、进一步的,所述的驱动机构包括转向减速器、驱动电机,所述的转向减速器固接在第一套筒底圈外侧,所述的驱动电机输出端与转向减速器输入端固接。
5、与现有技术相比,本发明的有益效果是:本发明的碳纤维机器人手臂,其中的套筒采用了碳纤维材料卷制而成,强度大重量轻,而在本发明中,所设计的伸缩机构,以滑轮组作为动力,具有运动平稳,噪音小等特点。
6、本发明具有结构简单、安全有效、使用效果好等优点。
技术特征:
1.一种碳纤维机器人手臂,其特征在于,包括:第一套筒(1)、第二套筒(2)、第三套筒(3)、第四套筒(4)、驱动机构(5)、伸缩机构(6)、第一定滑轮(7)、第二定滑轮(8)、第三定滑轮(9)、第四定滑轮(10)、第一拉动绳(11)、第二拉动绳(12)、第三拉动绳(13)、第四拉动绳(14),所述的第一套筒(1)、第二套筒(2)、第三套筒(3)、第四套筒(4)由外至内依次套接,且套筒的截面呈正多边形,所述的驱动机构(5)固接在第一套筒(1)底圈的外侧,所述的伸缩机构(6)设置在第一套筒(1)底圈内侧的中心位置,且伸缩机构(6)输入端与驱动机构(5)输出端连接,所述的第一定滑轮(7)固接在伸缩机构(6)的顶端,所述的第一拉动绳(11)绕过第一定滑轮(7),且第一拉动绳(11)两端分别连接第一套筒(1)底圈与第三套筒(3)底圈,所述的第二定滑轮(8)设置在第三套筒(3)的底圈上,所述的第二拉动绳(12)绕过第二定滑轮(8),且第二拉动绳(12)两端分别连接在伸缩机构(6)顶端与第四套筒(4)底端,所述的第三定滑轮(9)设置在第三套筒(3)顶圈上,所述的第三拉动绳(13)绕过第三定滑轮(9),且第三拉动绳(13)两端分别连接在第四套筒(4)底圈与第二套筒(2)底圈,所述的第四定滑轮(10)固接在第二套筒(2)底圈上,所述的第四拉动(14)绳绕过第四定滑轮(10),且第四拉动绳(14)两端分别连接在第一套筒(1)顶圈与第三套筒(3)底圈。
2.根据权利要求1所述的所一种碳纤维机器人手臂,其特征在于,述的伸缩机构(6)包括驱动丝杆(61)、伸缩套筒(62)、驱动螺纹块(63),所述的驱动丝杆(61)通过轴承座设置在第一套筒(1)底圈中心位置,所述的伸缩套筒(62)套接在驱动丝杆(61)外部,所述的驱动螺纹块(63)固接在伸缩套筒(62)底部,且驱动螺纹块(63)通过螺纹与驱动丝杆(61)连接。
3.根据权利要求1所述的所一种碳纤维机器人手臂,其特征在于,所述的驱动机构(5)包括转向减速器(51)、驱动电机(52),所述的转向减速器(51)固接在第一套筒(1)底圈外侧,所述的驱动电机(52)输出端与转向减速器(51)输入端固接。
技术总结
本发明公开了一种碳纤维机器人手臂,包括:四组套筒、驱动机构、伸缩机构、四组滑轮、四组拉动绳,所述的套筒由外至内依次套接,所述的伸缩机构输入端与驱动机构输出端连接,所述的第一定滑轮固接在伸缩机构的顶端,所述的第一拉动绳两端分别连接第一套筒底圈与第三套筒底圈,所述的第二定滑轮设置在第三套筒的底圈上,所述的第二拉动绳两端分别连接在伸缩机构顶端与第四套筒底端,所述的第三定滑轮设置在第三套筒顶圈上,所述的第三拉动绳两端分别连接在第四套筒底圈与第二套筒底圈,所述的第四定滑轮固接在第二套筒底圈上,所述的第四拉动绳两端分别连接在第一套筒顶圈与第三套筒底圈。本发明具有结构简单、安全有效、使用效果好等优点。
技术研发人员:刘大钊,刘光涛,石光利,张永喜,董志军
受保护的技术使用者:德州梵博新材料科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!