一种机器人的机械臂控制方法、设备及机器人与流程
本技术涉及机器人控制,具体涉及一种机器人的机械臂控制方法、设备及机器人。
背景技术:
1、随着机械臂的普及和商用化,机械臂的应用领域不断增多,使用机械臂执行各种任务也不断丰富。在不同的应用场景下,需要利用机械臂的基准运动模型还原动作,目前绝大多数机械臂的应用仅限用于还原原始的基准运动模型中的动作,但涉及到复杂的环境时,比如清洁卫浴,现有技术很难控制机械臂模拟出适应性很高的动作,一方面机器人的位置和卫浴的安装位置可能存在相对误差,该误差会导致固定动作执行过程中无法清洁到卫浴或者发生碰撞等危险;第二方面,机械臂在清洁卫浴时无法感知任何反馈,无法对现有的动作模型进行数据分析,也就无法对于现有基准运动模型做更好的优化。
技术实现思路
1、第一方面,本技术实施例提供了一种机器人的机械臂控制方法,所述方法包括:
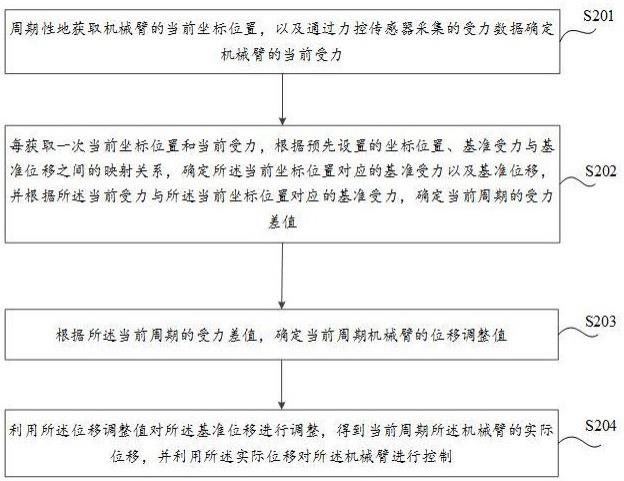
2、周期性地获取机械臂的当前坐标位置,以及通过力控传感器采集的受力数据确定机械臂的当前受力;
3、每获取一次当前坐标位置和当前受力,根据预先设置的坐标位置、基准受力与基准位移之间的映射关系,确定所述当前坐标位置对应的基准受力以及基准位移,并根据所述当前受力与所述当前坐标位置对应的基准受力,确定当前周期的受力差值;
4、根据所述当前周期的受力差值,确定当前周期机械臂的位移调整值;
5、利用所述位移调整值对所述基准位移进行调整,得到当前周期所述机械臂的实际位移,并利用所述实际位移对所述机械臂进行控制。
6、在上述实施例中,通过在机械臂上安装力控传感器,可以得到机械臂在运行过程中的力反馈,进而可以根据获得的受力数据进行分析,实时得到机械臂的运动状况,从而可以及时对机械臂的运动轨迹进行调整;另外,还将现有的运动模型(坐标位置-位移)与机械臂在标准运行环境中的受力数据相结合,得到坐标位置、基准受力与基准位移之间的映射关系,并利用该映射关系代替现有的运动模型作为机械臂的运动标准,并在该映射关系的基础上,结合机械臂的实时受力,使得机械臂能够更好地适应工作环境。
7、在一种可能的实施方式中,所述根据所述当前周期的受力差值,确定当前周期机械臂的位移调整值,包括:
8、若所述当前周期的受力差值大于第一预设阈值,则根据所述当前周期的受力差值,以及上一周期的受力差值,得到所述当前周期的受力差值调整值;
9、根据所述受力差值调整值、上一周期的位移调整值、上一周期的实际速度与基准速度之间的速度差、以及所述机械臂的性能参数,确定预测值,其中,上一周期的实际速度是对上一周期的实际位移进行微分得到,上一周期的基准速度是对上一周期的基准位移进行微分得到的;
10、对所述预测值进行积分,得到当前周期机械臂的位移调整值。
11、在一种可能的实施方式中,所述根据所述当前周期的受力差值,确定当前周期机械臂的位移调整值,包括:
12、若所述受力差值小于第一预设阈值且大于第二预设阈值,则将上一周期机械臂的位移调整值作为当前周期机械臂的位移调整值。
13、在上述实施例中,为了保证机械臂在运行时既能触碰到物体,又不会与该物体产生碰撞,在控制机械臂运动之前,首先判断一下实际受力与基准受力的受力差值,并根据该差值的取值范围,计算与取值范围对应的位移调整值。
14、另外,考虑到若一直对机械臂的位移进行大幅度调整,会使得机械臂的运行无法保持在一个稳定的状态,因此,若当前受力差值小于第一预设阈值且大于第二预设阈值,则表明当前机械臂的受力与基准受力差距不大,利用上一周期机械臂的位移调整值即可。
15、在一种可能的实施方式中,所述根据所述当前周期的受力差值,确定当前周期机械臂的位移调整值,包括:
16、若所述受力差值小于第二预设阈值且上一周期的位移调整值不小于第一预设位移,则根据上一周期的位移调整值和上两个周期的位移调整值,确定当前周期的位移恢复值;
17、将所述位移恢复值与所述上一周期的位移调整值的和,作为当前周期机械臂的位移调整值。
18、在一种可能的实施方式中,所述根据所述当前周期的受力差值,确定当前周期机械臂的位移调整值,包括:
19、若所述受力差值小于第二预设阈值且上一周期的位移调整值小于第一预设位移,则将上一周期的位移调整值作为当前周期机械臂的位移调整值。
20、在上述实施例中,当受力差值小于第二预设阈值时,若利用当前受力差值得到的当前周期的位移调整值或上一周期的位移调整值对基准位移进行调整,可能会出现调整过度的情况,因此,当上一周期的位移调整值大于第一预设位移时,需要根据上一周期的位移调整值和上两个周期的位移调整值,进一步地获得位移恢复值,并结合上一周期的位移调整值与位移恢复值的和对基准位移进行调整;但是若上一周期的位移调整值过小,则表明机械臂处于理想的运行状态,则利用上一周期的位移调整值对当前周期的基准位移进行调整。
21、在一种可能的实施方式中,所述通过力控传感器采集的受力数据确定机械臂的当前受力,包括:
22、将所述受力数据,根据预先设置的所述力控传感器的坐标相对于机械臂坐标的旋转矩阵和所述机械臂的坐标相对于机器人坐标的旋转矩阵,转换到机器人坐标系下的受力,并将所述机器人坐标系下的受力作为机械臂的当前受力。
23、在上述实施例中,一般地,力控传感器采集的受力数据是在自身的坐标系下,为了得到准确的位移调整值,需要把力控传感器采集的受力数据转换到机器人的坐标系下。
24、在一种可能的实施方式中,所述利用所述位移调整值对所述基准位移进行调整,包括:
25、若所述位移调整值小于或等于第二预设位移,则利用所述位移调整值对所述基准位移进行调整。
26、在上述实施例中,由于机械臂的运动范围有限,因此设置一个第二预设位移,当得到的位移调整值超过该第二预设位移时,则利用该第二预设位移进行调整。
27、第二方面,本技术实施例提供了一种机器人的机械臂控制设备,所述设备包括:
28、至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行:
29、周期性地获取机械臂的当前坐标位置,以及通过力控传感器采集的受力数据确定机械臂的当前受力;
30、每获取一次当前坐标位置和当前受力,根据预先设置的坐标位置、基准受力与基准位移之间的映射关系,确定所述当前坐标位置对应的基准受力以及基准位移,并根据所述当前受力与所述当前坐标位置对应的基准受力,确定当前周期的受力差值;
31、根据所述当前周期的受力差值,确定当前周期机械臂的位移调整值;
32、利用所述位移调整值对所述基准位移进行调整,得到当前周期所述机械臂的实际位移,并利用所述实际位移对所述机械臂进行控制。
33、第三方面,本技术实施例提供了一种机器人,所述机器人包括:
34、如上述第二方面的机器人的机械臂控制设备;
35、位于机械臂上的力控传感器,用于采集机械臂的受力数据。
36、第四方面,本技术实施例提供了一种计算机存储介质,所述计算机存储介质存储有计算机程序,所述计算机程序用于使计算机执行上述第一方面的方法。
- 还没有人留言评论。精彩留言会获得点赞!