一种换电机器人机械臂跟踪控制方法、装置、存储介质及电子设备与流程
本发明属于机器人控制,具体涉及一种换电机器人机械臂跟踪控制方法、装置、存储介质及电子设备。
背景技术:
1、当前乘用车换电车型和换电电池包种类繁多,换电时间长,换电站无法对多车型和多型号电池包实现一站式快换,难以满足用户和运营商要求。因此,如何实现多品牌/多车型/多型号电池包的共享换电是一个共性难题。通用型换电机器人机械臂的端部设有电池包加解锁装置,通过视觉传感器的图像信息,快速定位电池包锁扣的坐标,可实现精准定位,快速规划,路径跟踪控制,自动加解锁,可以有效解决电池包尺寸不一导致多型号兼容性换电难题。
2、通用型换电机械臂是一个多输入多输出系统,具有高非线性,强动态耦合,参数摄动和未知干扰等不良特性。机械臂的跟踪控制是近年来的研究重点和难点。然而,目前有关机械臂的轨迹跟踪控制仍存在着复杂的问题,滑模控制是解决这类问题的主要方法之一。但是,换电机器人跟踪控制仍然面临以下难点。第一:抖震问题无可避免,只能在一定程度上削弱它到一定的范围,这成为滑模变结构控制在实际系统中应用的突出障碍。第二:一般滑模控制器仅能保证渐进稳定,但是渐近稳定意味着闭环系统状态当时间趋于无穷大时才能收敛到平衡点,不能很好满足实际工程当中需要快速稳定的要求。第三:有限时间收敛的时间依赖于闭环系统状态的初始值,收敛时间会随着初始状态的变化而变化。目前常用的换电机器人轨迹跟踪控制方法未设计合适的滑模趋近律来减小抖振,缩短系统的响应时间。这些难点使得换电机器人机械臂轨迹跟踪控制成为一项极具挑战的研究课题。
技术实现思路
1、本发明的目的在于提供一种换电机器人机械臂跟踪控制方法、装置、存储介质及电子设备,基于一种新型的趋近律设计滑模控制器,对换电机器人机械臂进行跟踪控制,能进一步提高机械臂的动态性能和收敛速度。
2、为达到上述目的,本发明的技术方案如下:
3、本发明一方面提供一种换电机器人机械臂跟踪控制方法,包括:
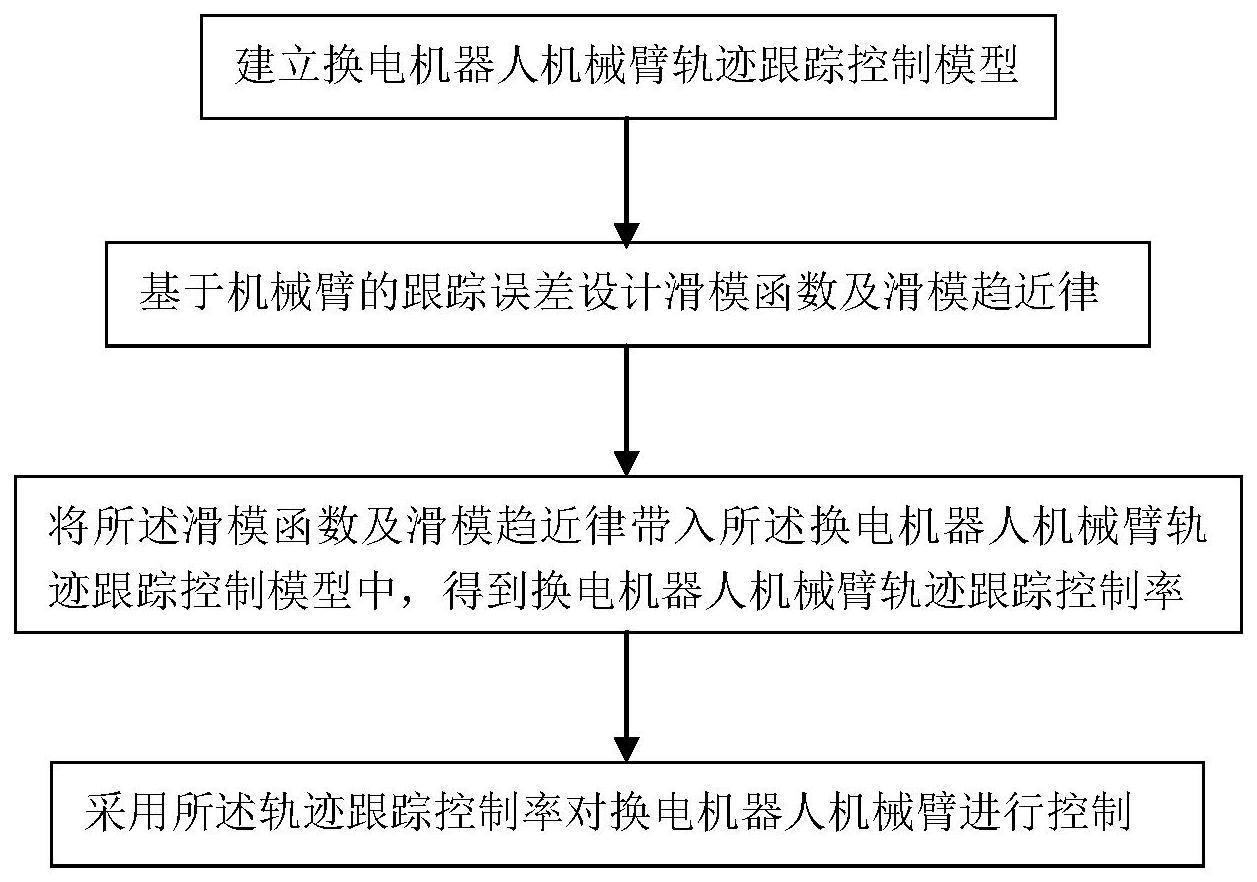
4、建立换电机器人机械臂轨迹跟踪控制模型;
5、基于机械臂的跟踪误差设计滑模函数及滑模趋近律;
6、将所述滑模函数及滑模趋近律带入所述换电机器人机械臂轨迹跟踪控制模型中,得到换电机器人机械臂轨迹跟踪控制率;
7、采用所述轨迹跟踪控制率对换电机器人机械臂进行控制。
8、进一步的,所述建立换电机器人机械臂轨迹跟踪控制模型,包括:
9、建立换电机器人二关节机械臂的动力学模型:
10、
11、其中,分别为机械臂的位置、角速度和角加速度,对于二关节机械臂存在q=[q1,q2]t,q1,q2分别为机械臂关节1和关节2当前的角度,m(q)为机械臂的惯性矩阵,为离心力和哥氏力矩阵,g(q)为机械臂的重力矢量,为摩擦力构成的矩阵,τd为外加扰动矩阵,满足|τd|≤d,d为外加扰动上界,τ为机械臂轨迹跟踪控制律。
12、进一步的,所述基于机械臂的跟踪误差设计滑模函数及滑模趋近律,包括:
13、基于机械臂的跟踪误差设计滑模函数如下:
14、
15、其中,σ为滑模函数,e为跟踪误差,p>r>0为正奇数,κ1>0,κ2>0为常数;
16、跟踪误差定义为:
17、e=qd-q;
18、
19、
20、其中,为跟踪误差的一阶导数,为跟踪误差的二阶导数,qd为机械臂的期望轨迹,
21、对于二关节机械臂,存在e=[e1,e2]t,qd=[qd1,qd2]t,e1,e2分别为机械臂关节1和关节2的跟踪误差,qd1,qd2分别为机械臂关节1和关节2的期望轨迹;
22、所述滑模趋近律设计为:
23、
24、其中,为滑模趋近律,s为滑模面,α、η、γ、k和ν均为滑模参数,满足:0<α<1,η+γ<1,μ=ν|σ(0)|1-α,σ(0)为滑模函数的初始值,k,ν为正数;
25、对于二关节机械臂,存在:
26、s=[σ1,σ2]t;
27、
28、
29、σ1、σ2分别为机械臂关节1和关节2的滑模函数。
30、进一步的,将所述滑模函数及滑模趋近律带入所述换电机器人机械臂轨迹跟踪控制模型中,得到换电机器人机械臂轨迹跟踪控制率,包括:
31、对所述滑模面进行一阶求导,得到:
32、
33、其中,diag{·}表示对角矩阵;
34、将所述跟踪误差的二阶导数、所述滑模面的一阶导数,以及所述滑模趋近律代入所述换电机器人机械臂轨迹跟踪控制模型中,得到:
35、
36、设计鲁棒项τr=dsign(s),代替所述换电机器人机械臂轨迹跟踪控制模型中的外加扰动矩阵τd,得到换电机器人机械臂轨迹跟踪控制率:
37、
38、进一步的,所述方法还包括,采用lyapunov函数验证所述轨迹跟踪控制率的有限时间收敛性,
39、所述lyapunov函数选取为:
40、
41、本发明第二方面提供一种换电机器人机械臂跟踪控制装置,用于实现前述的换电机器人机械臂控制方法,所述装置包括:
42、模型构建模块,用于建立换电机器人机械臂轨迹跟踪控制模型;
43、参数设计模块,用于基于机械臂的跟踪误差设计滑模函数及滑模趋近律;
44、计算模块,用于将所述滑模函数及滑模趋近律带入所述换电机器人机械臂轨迹跟踪控制模型中,得到换电机器人机械臂轨迹跟踪控制率;
45、控制模块,用于采用所述轨迹跟踪控制率对换电机器人机械臂进行控制。
46、本发明第三方面提供一种存储一个或多个程序的计算机可读存储介质,所述一个或多个程序包括指令,所述指令当由计算设备执行时,使得所述计算设备执行根据前述的方法中的任一方法。
47、本发明第四方面提供一种电子设备,包括,
48、一个或多个处理器、存储器以及一个或多个程序,其中一个或多个程序存储在所述存储器中并被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行根据前述的方法中的任一方法的指令。
49、本发明的有益效果是:
50、(1)、本发明提供一种换电机器人机械臂跟踪控制方法,设计了一种新型滑模趋近律,能够在提升收敛速度的同时较小系统抖振。
51、(2)、基于本发明设计的新型滑模趋近律设计的滑模控制器,与传统的滑模控制器相比,具有控制连续性,并进一步降低了抖震问题;同时,能在有限时间内稳定收敛,具有更高的跟踪精度。
技术特征:
1.一种换电机器人机械臂跟踪控制方法,其特征在于,包括:
2.根据权利要求1所述的一种换电机器人机械臂跟踪控制方法,其特征在于,所述建立换电机器人机械臂轨迹跟踪控制模型,包括:
3.根据权利要求2所述的一种换电机器人机械臂跟踪控制方法,其特征在于,所述基于机械臂的跟踪误差设计滑模函数及滑模趋近律,包括:
4.根据权利要求3所述的一种换电机器人机械臂跟踪控制方法,其特征在于,将所述滑模函数及滑模趋近律带入所述换电机器人机械臂轨迹跟踪控制模型中,得到换电机器人机械臂轨迹跟踪控制率,包括:
5.根据权利要求4所述的一种换电机器人机械臂跟踪控制方法,其特征在于,所述方法还包括,采用lyapunov函数验证所述轨迹跟踪控制率的有限时间收敛性,
6.一种换电机器人机械臂跟踪控制装置,其特征在于,用于实现权利要求1至5任意一项所述的换电机器人机械臂跟踪控制方法,所述装置包括:
7.一种存储一个或多个程序的计算机可读存储介质,其特征在于,所述一个或多个程序包括指令,所述指令当由计算设备执行时,使得所述计算设备执行根据权利要求1至5所述的方法中的任一方法。
8.一种电子设备,其特征在于,包括,
技术总结
本发明公开了一种换电机器人机械臂跟踪控制方法、装置、存储介质及电子设备,该方法包括:建立换电机器人轨迹跟踪控制模型;基于机械臂的跟踪误差设计滑模函数及滑模趋近律;将所设计的滑模函数及滑模趋近律带入换电机器人机械臂轨迹跟踪控制模型中,得到换电机器人机械臂轨迹跟踪控制率;采用该迹跟踪控制率对换电机器人机械臂进行控制。本发明提出一种新型滑模趋近律,能够在提升收敛速度的同时较小系统抖振,并给出其收敛时间;本发明方法能够进一步提高换电机器人机械臂的动态性能和收敛速度,对提高工作效率和节省劳动力有重要意义。
技术研发人员:陈良亮,蔡鑫,周斌,张浩,朱庆,杨凤坤,王立辉,祝文星,甘海庆,王明深,韩华春,周材,张建洲,王超,杨芳
受保护的技术使用者:国电南瑞科技股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!