设备异常的检测方法、装置和机器人与流程
本技术涉及设备异常检测,例如涉及一种设备异常的检测方法、装置和机器人。
背景技术:
1、目前,一些设备中通常采用电机作为动力源,如工业机器人设备、康复机器人设备或辅助机器人设备。为确保设备安全、正常运行,通常设置异常自检程序,如:检测设备中电机的实际电压、实际电流、实际输出扭矩、实际转速,将电压与电压阈值进行比较,如果电压低于下限电压阈值或高于上限电压阈值,则确定设备出现异常;将电流与电流阈值进行比较,如果电流低于下限电流阈值或高于上限电流阈值,则确定设备出现异常;如果实际输出扭矩高于上限扭矩阈值,则确定设备出现异常;如果实际转速高于上限转速阈值,则确定设备出现异常。
2、在实现本技术实施例的过程中,发现相关技术中至少存在如下问题:
3、异常检测结果的准确性偏低。
4、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本技术的背景的理解,因此可以包括不构成对本领普通技术人员已知的现有技术的信息。
技术实现思路
1、为了对披露的实施例的一些方面有基本的理解,下面给出了简单的概括。所述概括不是泛泛评述,也不是要确定关键/重要组成元素或描绘这些实施例的保护范围,而是作为后面的详细说明的序言。
2、本技术实施例提供了一种设备异常的检测方法,以提高异常检测结果的准确性。
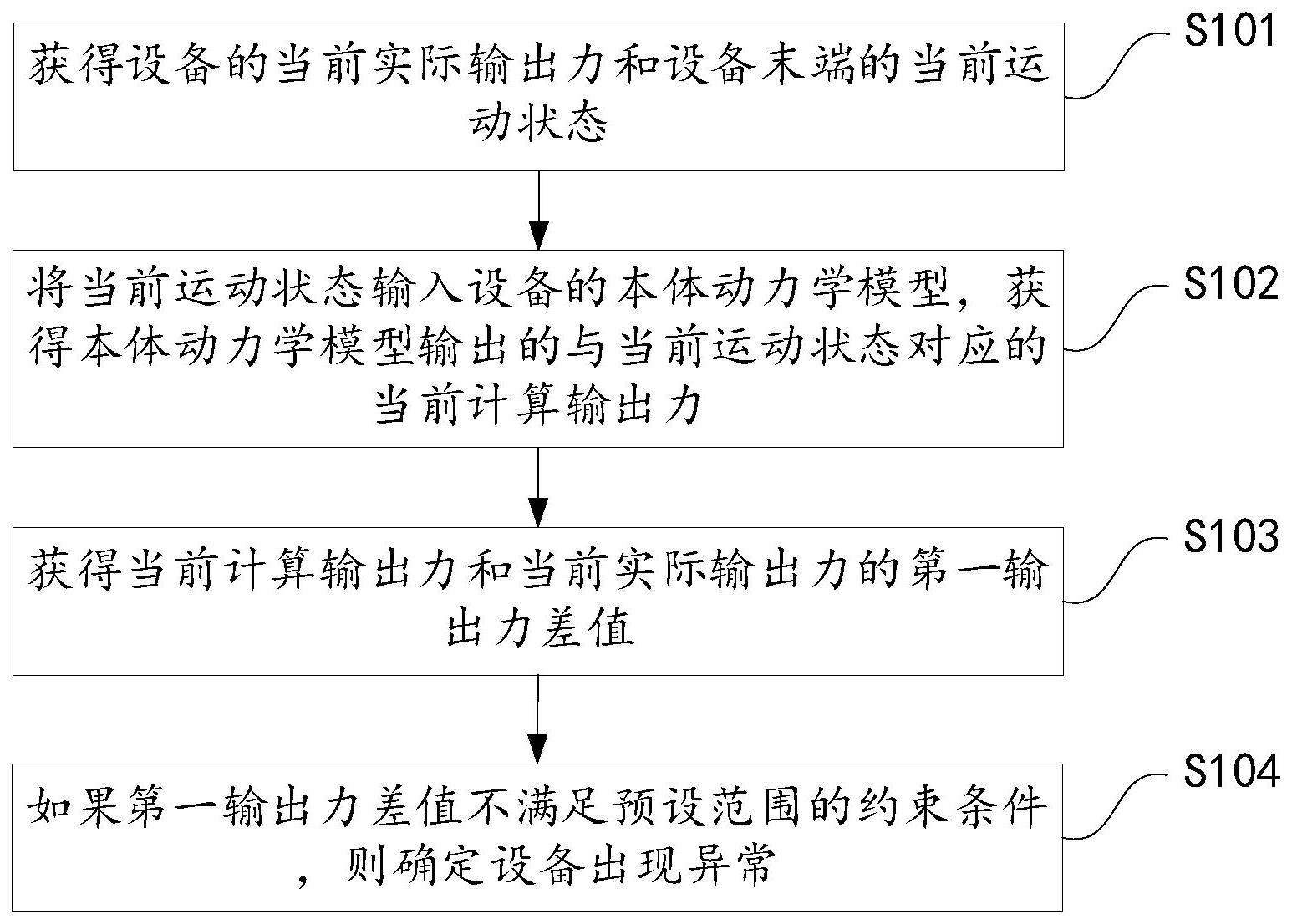
3、在一些实施例中,设备异常的检测方法包括:获得设备的当前实际输出力和设备末端的当前运动状态;将所述当前运动状态输入设备的本体动力学模型,获得所述本体动力学模型输出的与所述当前运动状态对应的当前计算输出力;获得所述当前计算输出力和所述当前实际输出力的第一输出力差值;如果所述第一输出力差值不满足预设范围的约束条件,则确定设备出现异常。
4、可选地,所述第一输出力差值不满足预设范围的约束条件的确定,包括:获得当前时刻前设定时长内的一个或多个历史实际输出力;根据一个或多个历史实际输出力和所述当前实际输出力,确定实际输出力变化率;根据所述实际输出力变化率对初始的预设范围进行调整,获得调整后的预设范围;如果所述输出力差值不属于调整后的预设范围,则确定所述第一输出力差值不满足预设范围的约束条件。
5、可选地,根据一个或多个历史实际输出力和当前实际输出力,确定实际输出力变化率,包括:在历史实际输出力的数量为一个的情况下,计算所述当前实际输出力和一个历史实际输出力的第二输出力差值,将所述第二输出力差值与所述一个历史实际输出力的商,作为所述实际输出力变化率。
6、可选地,根据一个或多个历史实际输出力和当前实际输出力,确定实际输出力变化率,包括:在历史实际输出力的数量为多个的情况下,按照输出时刻由早至晚的顺序,将多个历史实际输出力和当前实际输出力排列为一个序列;计算序列尾部的设定数量的实际输出力的第一平均值;计算序列头部的设定数量的实际输出力的第二平均值;利用所述第一平均值减去所述第二平均值,获得第三输出力差值,将所述第三输出力差值与所述第二平均值的商,作为所述实际输出力变化率;其中,所述设定数量小于或等于历史实际输出力的数量,所述设定数量与设备实际输出力的平均变化率的绝对值正相关。
7、可选地,根据所述实际输出力变化率对初始的预设范围进行调整,获得调整后的预设范围,包括:如果所述实际输出力变化率表示实际输出力在增大,且,所述第一输出力差值是通过所述当前实际输出力减去所述当前计算输出力获得的,则对初始的预设范围中的所有数值进行增大处理,将处理后的预设范围作为调整后的预设范围。
8、可选地,根据所述实际输出力变化率对初始的预设范围进行调整,获得调整后的预设范围,包括:如果所述实际输出力变化率表示实际输出力在减小,且,所述第一输出力差值是通过所述当前实际输出力减去所述当前计算输出力获得的,则对初始的预设范围中的所有数值进行减小处理,将处理后的预设范围作为调整后的预设范围。
9、可选地,根据所述实际输出力变化率对初始的预设范围进行调整,获得调整后的预设范围,包括:如果所述实际输出力变化率表示实际输出力在增大,且,所述第一输出力差值是通过所述当前计算输出力减去所述当前实际输出力获得的,则对初始的预设范围中的所有数值进行减小处理,将处理后的预设范围作为调整后的预设范围。
10、可选地,根据所述实际输出力变化率对初始的预设范围进行调整,获得调整后的预设范围,包括:如果所述实际输出力变化率表示实际输出力在减小,且,所述第一输出力差值是通过所述当前计算输出力减去所述当前实际输出力获得的,则对初始的预设范围中的所有数值进行增大处理,将处理后的预设范围作为调整后的预设范围。
11、可选地,对初始的预设范围中的所有数值进行增大处理,包括:获得与所述实际输出力变化率的绝对值正相关的第一偏移值,根据所述第一偏移值对初始的预设范围中的所有数值进行增大处理;
12、可选地,对初始的预设范围中的所有数值进行减小处理,包括:获得与所述实际输出力变化率的绝对值正相关的第二偏移值,根据所述第二偏移值对初始的预设范围中的所有数值进行减小处理。
13、可选地,根据所述第一偏移值对初始的预设范围中的所有数值进行增大处理,包括:计算预设范围中每个数值与所述第一偏移量的和,将若干和构成的数值范围作为调整后的预设范围。
14、可选地,根据所述第二偏移值对初始的预设范围中的所有数值进行减小处理,包括:计算预设范围中每个数值与所述第二偏移量的差,将若干差构成的数值范围作为调整后的预设范围。
15、可选地,如果所述实际输出力变化率为正数,则表示实际输出力在增大。
16、可选地,如果所述实际输出力变化率为负数,则表示实际输出力在减小。
17、可选地,预设范围的确定,包括:获得设备的噪声干扰;确定与所述噪声干扰对应的偏差阈值;根据所述偏差阈值确定所述预设范围,使所述预设范围的上限值大于或等于所述偏差阈值,所述预设范围的下限值小于或等于所述偏差阈值的相反数。
18、在一些实施例中,设备异常的检测装置包括第一获得模块、第二获得模块、第三获得模块和确定模块。
19、所述第一获得模块用于获得设备的当前实际输出力和设备末端的当前运动状态。
20、所述第二获得模块用于将所述当前运动状态输入设备的本体动力学模型,获得所述本体动力学模型输出的与所述当前运动状态对应的当前计算输出力。
21、所述第三获得模块用于获得所述当前计算输出力和所述当前实际输出力的第一输出力差值。
22、所述确定模块用于如果所述第一输出力差值不满足预设范围的约束条件,则确定设备出现异常。
23、在一些实施例中,设备异常的检测装置包括处理器和存储有程序指令的存储器,所述处理器被配置为在执行所述程序指令时,执行前述实施例的设备异常的检测方法。
24、在一些实施例中,机器人包括前述实施例提供的设备异常的检测装置。
25、本技术实施例提供的设备异常的检测方法、装置和机器人,可以实现以下技术效果:
26、在本技术实施例中,设备本体动力学能够表示设备的运动状态与设备的计算输出力之间的对应关系,即使设备的运动状态的剧烈程度适中(不过于剧烈也不过于平缓),如果设备出现异常,也会导致计算输出力与实际输出力二者之间出现较大的输出力差值,使第一输出力差值不满足预设范围的约束条件,从而确定设备出现异常,提高了设备异常检测结果的准确性。
27、以上的总体描述和下文中的描述仅是示例性和解释性的,不用于限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!