一种纯磁矩差速驱动球形胶囊机器人
本发明属于自动化工程,涉及一种具有差速陀螺传动结构的纯磁矩驱动球形胶囊机器人的创新结构设计,该胶囊能够借助其姿态改变实现全方位定点观察和滚动行走功能。
背景技术:
1、胶囊内窥镜是胃肠道病变检查的常用设备。然而,由于胃肠道内环境的限制,胶囊内窥镜的控制和移动非常具有挑战性。目前主流的胶囊内窥镜没有移动装置,只能通过肠道蠕动向前移动。这种位置和方向的不可控性导致其病理筛查效率低下。目前,关于可自主推进的胶囊内窥镜主要有两种解决方案:第一种是将驱动器或微型电机集成到胶囊内部,通过拖缆操作或电池提供能量供应,并借助胶囊的行走机构实现主动运动。然而,由于胶囊内窥镜体积有限,其直径约13mm,长度约25mm,胶囊内有限的体积不仅使系统的集成和微型化颇具挑战性,并且集成的微型电池无法充分保障系统的能量供应。第二种方案是以外部磁源作作为外驱动器,以胶囊内置永磁体为内驱动器,通过内、外驱动器的磁链接实现胶囊的主动运动,该类型胶囊统称为磁驱式胶囊。按照工作原理的不同,磁驱式胶囊可细分为磁共振型、磁力拖动型,磁力磁矩混合驱动型,以及纯磁矩驱动型等。
2、磁共振型胶囊机器人利用外部共振磁场驱动胶囊内部的永磁体或偏心块产生驱动力。尽管磁共振型胶囊可以为实现主动行走,然而磁共振系统产生的基本磁场方向是固定的,这使得该驱动系统无法对磁性物体的方向进行控制,从而限制了该类胶囊机器人在临床应用的可行性。磁力拖动胶囊利用外部永磁体、电磁线圈与胶囊内嵌永磁体产生的磁吸引力拖动胶囊运动。该种驱动方式具有驱动原理简单、操作方便和成本低廉的优点。然而,梯度磁场在空间上衰减较快,且场强与距离呈非线性关系,因而难以生成受控的大范围梯度磁场。磁力磁矩混合驱动型胶囊利用外部电磁装置和胶囊内嵌永磁体产生的磁吸引力拖动胶囊前进,并利用二者之间的静态磁力矩控制胶囊的方向。与磁力驱动胶囊相比,该方法不仅实现了胶囊的主动运动,而且对胶囊的方位实现了有效控制。然而,该驱动方式存在磁力与磁矩耦合问题,即通过磁力控制胶囊位置或通过磁矩控制胶囊方位时,两种操作会不可避免的产生相互影响。因此,要通过该种驱动方式实现胶囊位置和方向的精确控制,难度较大。
3、纯磁矩驱动胶囊的典型代表为螺旋型胶囊机器人,该类胶囊常内嵌径向磁化永磁体,并由外部旋转磁场进行驱动。螺旋型胶囊机器人多工作在充满流体的粘性工作环境中,胶囊绕自身轴线旋转时,可通过体表分布的螺旋肋,向后排开液体,从而将胶囊的旋转运动转化为直线运动,从而实现主动行走。与梯度磁场下的磁力拖动相比,均匀磁场环境下的纯磁矩驱动能避免磁力和磁矩的耦合问题,胶囊具有更好的可控性和更高的运动精度。然而,螺旋驱动胶囊仅能适应于充满液体的管状环境,对胃结肠等三维宽裕环境通常无法适用。同时,螺旋驱动方式也容易对肠道造成扭伤或刮伤。
4、综上,尽管诸多研究者已开发研究出基于各种驱动原理的胶囊机器人,并实现了胶囊机器人的主动运动,但现有胶囊结构和驱动原理难以实现其姿态和位置的精确控制,无法满足胶囊在人体胃肠道内全方位定点观察和运动行走的实际医疗需求。因此,开展新型主动胶囊的运动原理和结构方案的研究,实现其姿态和位置的有效控制是胶囊机器人的重点发展方向。
5、针对上述问题,本发明提出一种具有差速陀螺机构的纯磁矩驱动球形胶囊机器人,该胶囊能实现全方位定点观察和滚动行走功能。胶囊定点观察时,自动离合机构的可靠分离能够使胶囊的差速陀螺系统绕其中心轴线单独旋转,差速陀螺系统旋转产生的陀螺效应可保障胶囊云台相机拍摄画面的稳定。胶囊滚动行走时,其内部自动离合结构的可靠锁止,能够保证胶囊壳体随其内部差速陀螺系统一起转动,从而实现胶囊的滚动行走。通过控制外部旋转磁场的轴线方位,能够对实现对胶囊姿态的有效控制,进而实现胶囊全方位定点观察和滚动行走功能的相互转换。
6、本发明提出的纯磁矩驱动球形胶囊可以解决磁力驱动胶囊姿态控制困难以及磁力磁矩耦合问题,所提出的球形胶囊具有姿态可控性高,运动稳定性和灵活性好,有望解决限制磁驱胶囊机器人临床大规模推广应用的技术瓶颈。
技术实现思路
1、本发明是针对现有磁力胶囊机器人姿态控制困难,稳定性和灵活性差,以及容易冲击胃肠道等问题,设计一种通过均匀旋转磁场驱动的具有差速陀螺传动结构的球形胶囊机器人。本发明将差速传动机构,陀螺机构、自动离合结构与纯磁矩驱动技术深度融合,所设计的球形胶囊机器人能够在人体胃、结肠等三维宽裕环境内灵活可靠的实现定点姿态调整和滚动行走。
2、本发明的技术方案:
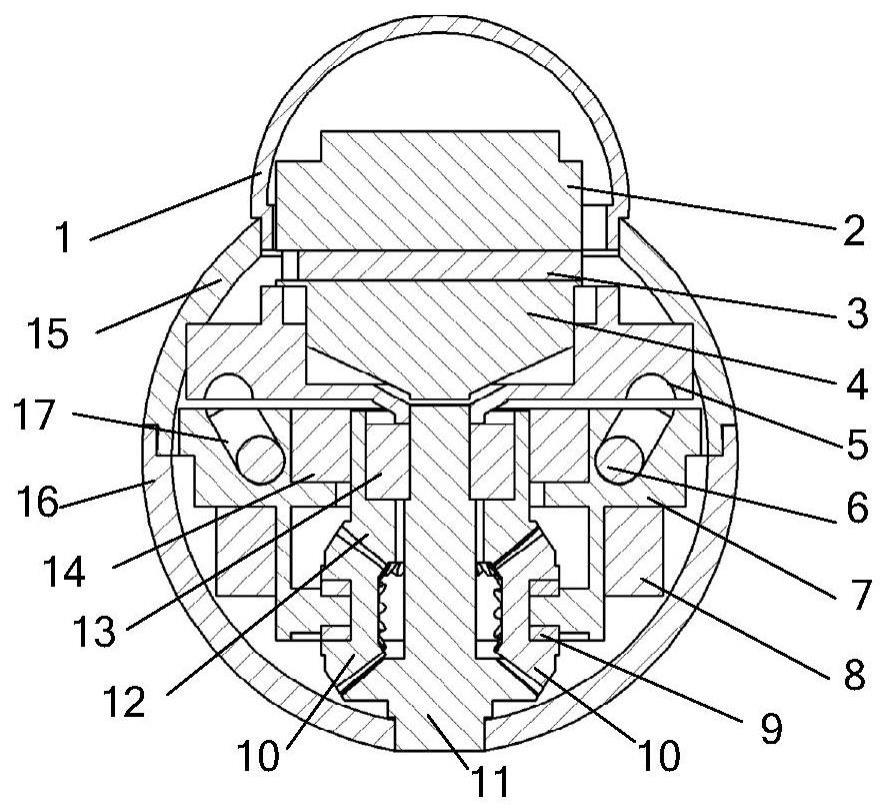
3、一种纯磁矩差速驱动球形胶囊机器人,该球形胶囊机器人的外部驱动源为三轴亥姆霍兹线圈产生的空间万向均匀旋转磁场,内部驱动源为胶囊内嵌径向磁化nd-fe-b永磁体;纯磁矩差速驱动球形胶囊机器人的外壳呈球形,球形一端为凸起的透明穹顶,透明穹顶内装有摄像模组;纯磁矩差速驱动球形胶囊机器人主要由差速陀螺系统、云台相机系统以及自动离合机构组成;纯磁矩差速驱动球形胶囊机器人定点观察时,其内部的差速陀螺系统用于保证云台相机系统的稳定,通过改变空间万向均匀旋转磁场的轴向方位,云台相机系统跟随磁场轴线来改变观察方位或观测位置;自动离合机构用于实现纯磁矩差速驱动球形胶囊机器人定点观测时云台相机系统与旋转法兰的分离,以及胶囊滚动行走时云台相机系统和旋转法兰的锁止;
4、所述的差速陀螺系统主要由法兰7、nd-fe-b永磁体8、微型轴承9、锥齿轮10、中心轴锥齿轮(锥齿轮与中心轴做成齿轮轴)11、桶形锥齿轮(锥齿轮与中心轴做成齿轮轴)12、微型陶瓷球轴承13以及陶瓷轴承14组成;其中,nd-fe-b永磁体8与法兰7过盈连接,法兰7通过陶瓷轴承14和桶形锥齿轮12构成转动连接;法兰7底部安装有一对锥齿轮10,该对锥齿轮10通过微型轴承9与法兰7构成转动连接;桶形锥齿轮12通过微型陶瓷球轴承13安装在中心轴锥齿轮11上,并与陶瓷轴承14的内圈形成过盈配合;中心轴锥齿轮11固定在下球壳16底部上,位于纯磁矩差速驱动球形胶囊机器人的中轴线上;当法兰7转动时,其底部安装的两个锥齿轮10可驱动与其相啮合的桶形锥齿轮12和中心轴锥齿轮11转动,安装在法兰7底部的锥齿轮10、中心轴锥齿轮11以及桶形锥齿轮12构成了差速器,该差速器的动力源是径向磁化的nd-fe-b永磁体8;球形胶囊机器人轴线处于竖直位置但不限于完全竖直时,外部均匀旋转磁场可通过径向磁化nd-fe-b永磁体8驱动法兰7绕桶形锥齿轮12转动;法兰(7)上安装的锥齿轮(10)可直接驱动桶形锥齿轮(12)绕中心轴锥齿轮(11)转动,而与锥齿轮10相啮合的中心轴锥齿轮11则不发生转动,产生该现象的原因是:与中心轴锥齿轮11相固连的球壳与其下方的粘弹性胃肠道接触,因而受到粘弹性摩擦阻尼力矩作用,但与锥齿轮10相啮合的桶形锥齿轮12上仅作用有轴承滚珠和滚道间的摩擦力矩,该力矩远小于胶囊与胃肠道间的摩擦力矩;根据最小能耗原理,桶形锥齿轮12将产生类似汽车车轮打滑的“空转”,而与中心轴锥齿轮11固连的下球壳16则不产生转动。因此,nd-fe-b永磁体8、法兰7、锥齿轮10对以及与其相啮合的桶形锥齿轮12和中心轴锥齿轮11构成了差速陀螺系统。此时,法兰7上安装的锥齿轮10对既产生绕中心轴锥齿轮11的公转,又产生绕其自身轴线的自转。球形胶囊机器人定点观察时,由于法兰7、锥齿轮10对以及桶形锥齿轮12绕中心轴锥齿轮11高速转动,其产生的陀螺效应能够保证中心轴锥齿轮11的稳定,而中心轴锥齿轮11与云台5相机相固连,因此可以保持胶囊拍摄画面的稳定。
5、所述的云台相机系统主要由透明穹顶1、摄像模组2、微型电池3、无线发射模块4和云台5组成;其中,摄像模组2、微型电池3、无线发射模块4构成无线图像传模块,无线图像传模块通过云台5和透明穹顶1上的中心孔实现位置固定;云台5通过周向均匀分布的4个卡扣与上球壳15形成固定连接,并通过下部的中心孔与中心轴锥齿轮11形成过盈连接;云台5与法兰7在轴线方向存在间隙,球形胶囊机器人处于竖直位置但不限于完全竖直时,法兰7和云台5处于分离状态,二者之间存在相对转动;球形胶囊机器人轴线处于水平位置但不限于完全水平时,法兰7和云台5处于锁止状态,二者无相对转动;云台5的底部凸起与陶瓷轴承13的内圈端面相配合,实现微型陶瓷球轴承13的轴向定位;当球形胶囊机器人轴线处于竖直位置但不限于完全竖直位置时,摄像模组2可通过透明穹顶1对目标区域进行拍照和录像。由于云台相机不随差动陀螺系统旋转,而差动陀螺系统能旋转产生的陀螺效应能够保持云台5的稳定,因此可以保证胃肠道图像拍摄的稳定性。
6、所述的自动离合机构主要由云台5上的球形凹坑、小滚珠6以及法兰7上的圆柱形滚道17组成,云台5与法兰7之间沿中心轴锥齿轮11方向具有配合间隙;云台5上球形凹坑的直径与小滚珠6的直径相同,法兰7上的倾斜圆柱形滚道17的直径大于小滚珠6的直径,小滚珠6可在倾斜圆柱形滚道17内自由滚动,且圆柱形滚道17的中心轴线通过云台5上的球形凹坑的中心;球形胶囊机器人内部设置有4组均布排列的自动离合机构;当球形胶囊机器人轴线处于竖直位置但不限于完全竖直时,小滚珠6在重力作用下运动到法兰7上的倾斜圆柱形滚道17的底部,此时自动离合机构处于分离状态;当球形胶囊机器人轴线处于水平位置时,离合结构可自动锁止;球形胶囊机器人内部均布排列的4组离合中,处于中、下方位置自动离合机构中的小滚珠6,在重力作用下将沿轨道向下滚动,直到与云台5上的球形凹坑相接触;此时,小滚珠6一半卡在法兰7上的倾斜圆柱形滚道17中,一半卡在云台5的球形凹坑中;通过剪切小滚珠6,旋转的法兰7能带动云台5转动,由于云台5又与上球壳15固连,因此可带动球形胶囊机器人滚动;即使起初位于球形胶囊机器人下方的小滚珠6在随球形胶囊机器人滚动过程中运动到了上方,由于云台5上的球形凹坑能有效卡持小滚珠6,且法兰7在剪切小滚珠6的过程中有将其压紧在云台5凹槽中的趋势,因此保证小滚珠6的有效嵌合。
7、本发明的有益效果:本发明将差速器结构、陀螺稳定技术以及自动离合机构融入纯磁矩驱动球形胶囊机器人的结构设计。通过控制外部旋转磁场的轴线方位,实现了胶囊定点观察时的云台相机的姿态稳定,以及改变观察位置时胶囊的滚动行走,且自动离合结构能够可靠的保证胶囊两种工作模式的稳定运行与相互转换。胶囊定点观察时,其差动陀螺系统绕其中心轴的单独旋转,有效防止了旋转画面的产生,并为云台相机稳定画面的拍摄提供了技术保障。胶囊滚动行走时,其自动离合机构的可靠锁止,满足了胶囊随外部旋转磁场改变观测位置的工作需求。本发明所设计的胶囊具有结构紧凑、可靠性高,稳定性好,胶囊姿态控制灵活,并能实现胶囊姿态调整与滚动行走两种工作模式分离等优点,有效克服了传统磁力驱动胶囊姿态控制困难,稳定性和可操纵性差等不足,可以为磁驱胶囊的大规模推广提供强有力的技术支撑。
- 还没有人留言评论。精彩留言会获得点赞!