六轴机器人运动调整方法、系统、六轴机器人以及介质与流程
本发明涉及机器人控制,尤其涉及一种六轴机器人运动调整方法、系统、六轴机器人以及介质。
背景技术:
1、工业机器人是能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机,可以代替人类去完成较危险或难度高的工作。
2、现如今,六轴机器人被广泛应用在货物搬运行业,然而,由于在搬运货物时六轴机器人的高度是一定的,且货物在搬运途中,货物受到惯性力的作用的原因,导致六轴机器人搬运货物的效率不高。
技术实现思路
1、本发明的主要目的在于提供一种六轴机器人运动调整方法、系统、六轴机器人以及介质,旨在解决现有六轴机器人搬运货物效率不高的技术问题。
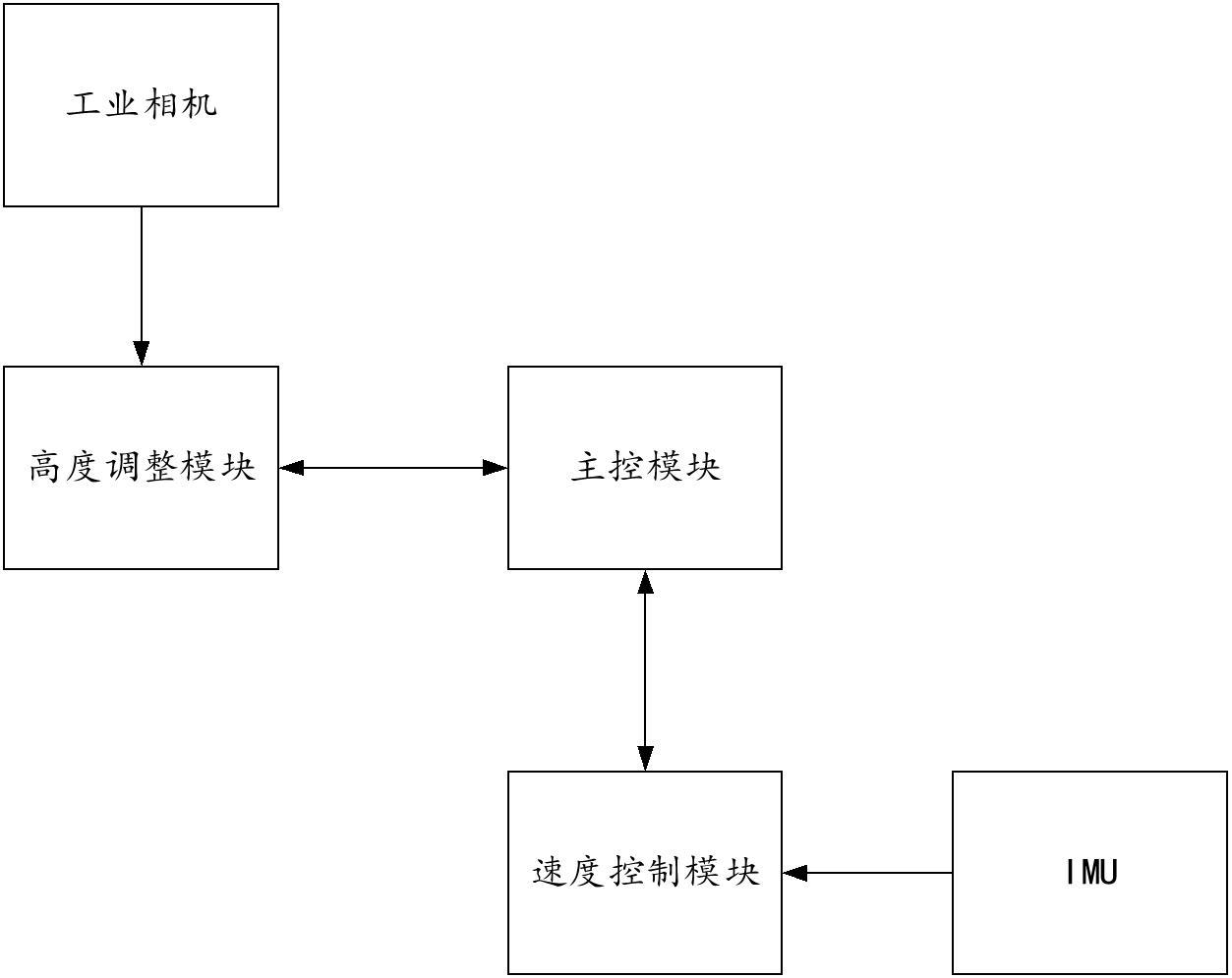
2、为实现上述目的,本发明提供一种六轴机器人运动调整方法,所述六轴机器人运动调整方法应用于六轴机器人,所述六轴机器人包括:高度调整模块、速度控制模块、主控模块、imu(inertial measurement unit,惯性测量单元)和工业相机,所述工业相机与所述高度调整模块进行连接,所述imu与所述速度控制模块进行连接,所述主控模块与所述高度调整模块、所述速度控制模块进行连接;
3、所述六轴机器人运动调整方法包括:
4、在处于第一机器高度时,通过所述工业相机拍摄待搬运货物的图像,其中,所述第一机器高度为六轴机器人的默认高度;
5、通过所述主控模块根据所述图像和所述第一机器高度得到第二机器高度,并控制所述高度调整模块将所述六轴机器人的机器高度调整为所述第二机器高度;
6、在处于所述第二机器高度并搬运货物时,通过所述imu采集速度数据;
7、通过所述主控模块对所述速度数据进行拟合处理得到搬运速度数据,并控制所述速度控制模块根据所述搬运速度数据进行调整。
8、可选地,所述六轴机器人还包括:高度传感器,在所述在处于第一机器高度时,通过所述工业相机拍摄待搬运货物的图像的步骤之前,所述方法还包括:
9、通过所述高度传感器采集所述六轴机器人的机器高度以得到第一机器高度。
10、可选地,所述主控模块包括:特征提取单元和图像处理单元,所述通过所述主控模块根据所述图像和所述第一机器高度得到第二机器高度的步骤,包括:
11、通过所述图像处理单元对所述图像进行归一化处理得到第二货物图像;
12、通过所述特征提取单元对所述第二货物图像进行特征提取处理得到第三货物图像;
13、根据所述第三货物图像和所述第一机器高度得到第二机器高度。
14、可选地,所述根据所述第三货物图像和所述第一机器高度得到第二机器高度的步骤,包括:
15、根据所述第一机器高度得到所述工业相机的坐标位置;
16、根据所述坐标位置和所述第三货物图像得到货物高度,并根据所述货物高度得到第二机器高度。
17、可选地,所述速度数据包括:第一旋转角度数据和第一加速度数据,所述通过所述主控模块对所述速度数据进行拟合处理得到搬运速度数据的步骤,包括:
18、通过所述主控模块对所述第一旋转角度数据进行拟合处理得到第二旋转角度数据;
19、通过所述主控模块对所述第一加速度数据进行拟合处理得到第二加速度数据;
20、根据所述第二旋转角度数据和所述第二加速度数据得到搬运速度数据。
21、可选地,所述六轴机器人运动调整方法还包括:
22、获取所述六轴机器人的运行数据,其中,所述运行数据包括:位置运行数据和速度运行数据;
23、所述根据所述第二旋转角度数据和所述第二加速度数据得到搬运速度数据的步骤包括:
24、根据所述位置运行数据和所述第二旋转角度数据得到第一校正数据;
25、根据所述第二加速度数据和所述速度运行数据得到第二校正数据;
26、根据所述第一校正数据和所述第二校正数据得到搬运速度数据。
27、可选地,所述速度控制模块包括:角速度控制单元和搬运速度控制单元,所述控制所述速度控制模块根据所述搬运速度数据进行调整的步骤包括:
28、控制所述角速度控制单元根据所述第一校正数据进行调整,并控制所述搬运速度控制单元根据所述第二校正数据进行调整。
29、此外,为实现上述目的,本发明还提供了一种六轴机器人运动调整系统,所述六轴机器人运动调整系统应用于六轴机器人,所述六轴机器人包括:高度调整模块、速度控制模块、主控模块、imu和工业相机,所述工业相机与所述高度调整模块进行连接,所述imu与所述速度控制模块进行连接,所述主控模块与所述高度调整模块、所述速度控制模块进行连接;
30、所述六轴机器人运动调整系统包括:
31、第一获取模块,用于在处于第一机器高度时,通过所述工业相机拍摄待搬运货物的图像,其中,所述第一机器高度为六轴机器人的默认高度;
32、机器人高度整理模块,用于通过所述主控模块根据所述图像和所述第一机器高度得到第二机器高度,并控制所述高度调整模块将所述六轴机器人的机器高度调整为所述第二机器高度;
33、第二获取模块,用于在处于所述第二机器高度并搬运货物时,通过所述imu采集速度数据;
34、运动补偿模块,用于通过所述主控模块对所述速度数据进行拟合处理得到搬运速度数据,并控制所述速度控制模块根据所述搬运速度数据进行调整。
35、此外,为实现上述目的,本发明还提供了一种六轴机器人,所述六轴机器人包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的六轴机器人运动调整程序,所述六轴机器人运动调整程序被所述处理器执行时实现如上所述的六轴机器人运动调整方法的步骤。
36、此外,为实现上述目的,本发明还提供了一种存储介质,所述存储介质上存储有六轴机器人运动调整程序,所述六轴机器人运动调整程序被处理器执行时实现如上所述的六轴机器人运动调整方法的步骤。
37、本发明提供的一种六轴机器人运动调整方法、系统、六轴机器人以及介质,六轴机器人运动调整方法应用于六轴机器人,所述六轴机器人包括:高度调整模块、速度控制模块、主控模块、imu和工业相机,所述工业相机与所述高度调整模块进行连接,所述imu与所述速度控制模块进行连接,所述主控模块与所述高度调整模块、所述速度控制模块进行连接;所述六轴机器人运动调整方法包括:在处于第一机器高度时,通过所述工业相机拍摄待搬运货物的图像,其中,所述第一机器高度为六轴机器人的默认高度;通过所述主控模块根据所述图像和所述第一机器高度得到第二机器高度,并控制所述高度调整模块将所述六轴机器人的机器高度调整为所述第二机器高度;在处于所述第二机器高度并搬运货物时,通过所述imu采集速度数据;通过所述主控模块对所述速度数据进行拟合处理得到搬运速度数据,并控制所述速度控制模块根据所述搬运速度数据进行调整。
38、本发明提出的六轴机器人运动调整方法应用于六轴机器人,并且该六轴机器人包括高度调整模块、速度控制模块、主控模块、imu和工业相机,并且工业相机与高度调整模块进行连接,imu与速度控制模块进行连接,主控模块与高度调整模块和速度控制模块进行连接;该六轴机器人运动调整方法包括:六轴机器人在处于默认高度时,通过工业相机拍摄待搬运货物的图像,然后通过主控模块根据待搬运货物的图像和六轴机器人的默认高度得到第二机器高度,并控制高度调整模块将六轴机器人的高度调整为第二机器高度,并在六轴机器人搬运货物时,通过imu采集搬运的速度数据,然后通过主控模块对速度数据进行拟合处理得到六轴机器人的搬运速度数据,并控制速度控制模块根据搬运速度数据进行调整。
39、相比传统六轴机器人在固定高度搬运货物的方式来说,本发明通过工业相机拍摄待搬运货物的图像,并根据图像调整六轴机器人高度的方式,提高了六轴机器人搬运货物的便携性,从而提高了六轴机器人搬运货物的效率;此外,本发明还通过imu采集六轴机器人在搬运货物时的速度数据,并通过主控模块对速度数据进行拟合处理得到搬运速度数据,使得六轴机器人根据搬运速度搬运货物的方式,提高了六轴机器人搬运货物的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!