一种应用于机器人的姿态平衡控制方法与流程
本发明涉及机器人控制,特别涉及一种应用于机器人的姿态平衡控制方法。
背景技术:
1、目前,两足或多足机器人由于可以在复杂地形空间内移动,被广泛用于未知空间探索或者在复杂地形中移动。但是由于两足或多足机器人的关节动作复杂,其控制变量多样化且存在非线性关系,因此,其姿态平衡控制难度很大。有诸多学者提出基于模糊强化学习来优化机器人的姿态平衡控制输出,其针对机器人控制过程中存在的控制精度不高和控制器输出离散等问题,采用模糊理论泛化动作空间,改善控制精度,并使控制输出连续。
2、但是,上述方式需要经过基于机器人特性进行状态空间设计、回报函数设计,进而设计出控制算法流程,基于控制算法流程进行迭代更新直至算法达到收敛,控制设计过程较为复杂。
3、因此,本发明提出了一种应用于机器人的姿态平衡控制方法。
技术实现思路
1、本发明提供一种应用于机器人的姿态平衡控制方法,用以对机器人在移动过程中的运动模型进行帧拆分,基于帧拆分后的静态动力学模型进行局部平衡控制计算,并对确定出的所有局部平衡控制参数进行汇总和时序上的模糊处理,提高了机器人姿态平衡控制的连续性,并通过确定出的控制连续性预测结果实现对机器人姿态平衡控制的连续性的进一步提高,该姿态平衡控制过程相较现有技术有所简化。
2、本发明提供一种应用于机器人的姿态平衡控制方法,包括:
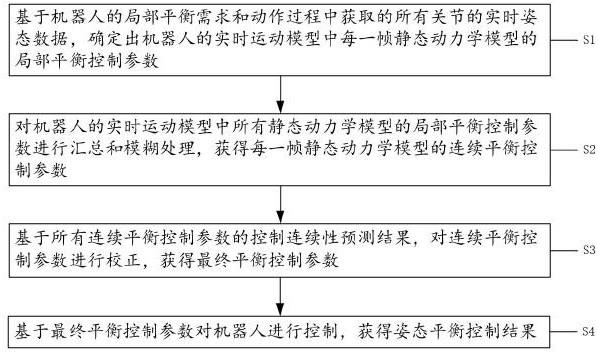
3、s1:基于机器人的局部平衡需求和动作过程中获取的所有关节的实时姿态数据,确定出机器人的实时运动模型中每一帧静态动力学模型的局部平衡控制参数;
4、s2:对机器人的实时运动模型中所有静态动力学模型的局部平衡控制参数进行汇总和模糊处理,获得每一帧静态动力学模型的连续平衡控制参数;
5、s3:基于所有连续平衡控制参数的控制连续性预测结果,对连续平衡控制参数进行校正,获得最终平衡控制参数;
6、s4:基于最终平衡控制参数对机器人进行控制,获得姿态平衡控制结果。
7、优选的,所述的一种应用于机器人的姿态平衡控制方法,s1:基于机器人的局部平衡需求和动作过程中获取的所有关节的实时姿态数据,确定出机器人的实时运动模型中每一帧静态动力学模型的局部平衡控制参数,包括:
8、s101:基于机器人的三维肢体模型和动作过程中获取的所有关节的实时姿态数据,搭建出机器人的实时运动模型;
9、s102:基于局部平衡需求在实时运动模型的每一帧静态动力学模型中提取出局部动力学模型;
10、s103:基于局部动力学模型和局部平衡需求对应的局部平衡控制器,确定出对应帧的静态动力学模型的局部平衡控制参数。
11、优选的,所述的一种应用于机器人的姿态平衡控制方法,s2:对机器人的实时运动模型中所有静态动力学模型的局部平衡控制参数进行汇总和模糊处理,获得每一帧静态动力学模型的连续平衡控制参数,包括:
12、s201:将静态动力学模型的所有局部平衡控制参数中同类型的局部平衡控制参数数值汇总加和,获得静态动力学模型中每种平衡控制参数的个性化数值;
13、s202:按照所有静态动力学模型的时序,将每种平衡控制参数在所有静态动力学模型中的个性化数值进行排序,获得每种平衡控制参数的控制数值序列;
14、s203:对控制数值序列进行模糊平滑处理,获得平滑控制数值序列;
15、s204:将每一帧静态动力学模型在平滑控制数值序列中对应的平滑后的个性化数值,当作对应种平衡控制参数在对应静态动力学模型中的连续平衡控制参数;
16、其中,个性化数值用向量表示,其向量的方向表示对应平衡控制参数的控制方向,其向量的数值表示对应平衡控制参数的输出数值。
17、优选的,所述的一种应用于机器人的姿态平衡控制方法,s203:对控制数值序列进行模糊平滑处理,获得平滑控制数值序列,包括:
18、将控制数值序列中包含的个性化数值对应的向量按照顺序首尾相接,获得控制数值表征线;
19、基于对应平衡控制参数的最大角度调节范围和最大数值调节范围计算出对应平衡控制参数的突变向量模阈值;
20、基于突变向量模阈值在控制数值表征线中筛选出待平滑点;
21、对所有待平滑点进行模糊平滑处理,获得平滑控制数值序列。
22、优选的,所述的一种应用于机器人的姿态平衡控制方法,基于突变向量模阈值在控制数值表征线中筛选出待平滑点,包括:
23、将控制数值序列中相邻两个个性化数值中前一个性化数值在控制数值表征线中的起点与后一个性化数值在控制数值表征线中的终点之间的长度,获得突变向量模;
24、将突变向量模与突变向量模阈值的比值当作突变占比,并将突变占比超出突变占比阈值的两个个性化数值在控制数值表征线中的连接点,当作待平滑点。
25、优选的,所述的一种应用于机器人的姿态平衡控制方法,对所有待平滑点进行模糊平滑处理,获得平滑控制数值序列,包括:
26、基于以待平滑点为终点的个性化数值与对应前一相邻个性化数值之间的突变占比,计算出第一突变占比最大可调节值,基于第一突变占比最大可调节值和突变向量模阈值计算出第一突变向量模最大可调节值;
27、基于以待平滑点为起点的个性化数值与对应后一相邻个性化数值之间的突变占比,计算出第二突变占比最大可调节值,基于第二突变占比最大可调节值和突变向量模阈值计算出第二突变向量模最大可调节值;
28、基于第一突变向量模最大可调节值和第二突变向量模最大可调节值,确定出待平滑点在控制数值表征线中被模糊平滑处理后的点;
29、基于所有待平滑点在控制数值表征线中被模糊平滑处理后的点更新对应的两个个性化数值,获得平滑控制数值序列。
30、优选的,所述的一种应用于机器人的姿态平衡控制方法,基于第一突变向量模最大可调节值和第二突变向量模最大可调节值,确定出待平滑点在控制数值表征线中被模糊平滑处理后的点,包括:
31、将以待平滑点为终点的个性化数值在控制数值表征线中的起点当作圆心,并将第一突变向量模最大可调节值当作半径,确定出第一圆区域;
32、将以待平滑带你为起点的个性化数值在控制数值表征线中的终点当作圆心,并将第二突变向量模最大可调节值当作半径,确定出第二圆区域;
33、将第一圆区域和第二圆区域的重合区域中与对应待平滑点间距最小的点,当作待平滑点在控制数值表征线中被模糊平滑处理后的点。
34、优选的,所述的一种应用于机器人的姿态平衡控制方法,s3:基于所有连续平衡控制参数的控制连续性预测结果,对连续平衡控制参数进行校正,获得最终平衡控制参数,包括:
35、s301:基于连续平衡控制参数和所有的静态动力学模型,搭建出平衡预控制动态模型;
36、s302:基于平衡预控制动态模型,模拟出预控制重心点移动轨迹;
37、s303:基于预控制重心点移动轨迹获得控制连续性预测结果;
38、s304:基于连续性预测结果对连续平衡控制参数进行校正,获得每一帧静态动力学模型的最终平衡控制参数。
39、优选的,所述的一种应用于机器人的姿态平衡控制方法,s303:基于预控制重心点移动轨迹获得控制连续性预测结果,包括:
40、将预控制重心点移动轨迹在预设坐标横平面中的投影,当作重心平面移动轨迹;
41、将重心平面移动轨迹与预设重心平面移动轨迹的匹配度,当作控制连续性预测结果。
42、优选的,所述的一种应用于机器人的姿态平衡控制方法,s304:基于连续性预测结果对连续平衡控制参数进行校正,获得每一帧静态动力学模型的最终平衡控制参数,包括:
43、当连续性预测结果中的匹配度超出匹配度阈值时,则对重心平面移动轨迹和预设重心平面移动轨迹进行对齐周期划分,并计算出周期划分后获得的部分重心平面移动轨迹和部分预设重心平面移动轨迹之间的局部匹配度;
44、基于局部匹配度超出匹配度阈值的部分重心平面移动轨迹,对连续平衡控制参数进行校正,获得对应帧静态动力学模型的最终平衡控制参数。
45、本发明的有益效果为:对机器人在移动过程中的运动模型进行帧拆分,基于帧拆分后的静态动力学模型进行局部平衡控制计算,并对确定出的所有局部平衡控制参数进行汇总和时序上的模糊处理,提高了机器人姿态平衡控制的连续性,并通过确定出的控制连续性预测结果实现对机器人姿态平衡控制的连续性的进一步提高,该姿态平衡控制过程相较现有技术有所简化。
46、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
47、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!