一种机械臂控制方法、计算机设备及可读存储介质与流程
本发明涉及机器人控制,具体涉及一种机械臂控制方法、计算机设备及可读存储介质。
背景技术:
1、机械臂作为当今普遍应用于工业生产的机械装置,其应用越来越广泛。现有技术中一种机械臂的抓取方式为点对点的抓取,其通过预先设置好抓取的位置,预先规划好抓取的路线,并不具备灵活性,也不能满足柔性生产的要求。基于视觉判断的控制方法,使机械臂能够灵活抓取空间内位于任意位置的目标,自动化程度进一步提高,且具有更加广泛的应用场景。
2、现有技术中基于视觉判断的控制方法通常是在机械臂的工作空间内进行路径搜索,通过强化学习等方法进行运动路径的规划。在运动路径上存在障碍物的情况下,可通过例如人工势场法等进行优化求解,实现避障运动路径的规划。人工势场法能够实现实时控制且能够提高优化问题的求解效率,取得较好的避障效果,但同时也存在搜索步长较小时容易陷入局部最小值等缺陷。
3、现有专利文献cn115416016a公开了一种基于改进人工势场法的机械臂避障路径规划方法,采用改进人工势场法进行机械臂的避障路径规划,可以消除复杂障碍物环境下的抖动问题。现有专利文献cn114055471b公开了一种结合神经运动规划算法和人工势场法的机械臂在线运动规划方法,在距离目标较远时采用强化学习进行规划、距离小于阈值时切换为人工势场进行规划,提高了强化学习的训练速度和运动规划成功率。
4、上述方案均提出了机械臂避障路径规划方法。然而,在复杂障碍物环境下,特别是在多障碍物或移动障碍物环境下,采用人工势场法的避障路径规划容易陷入局部最小值,甚至导致机械臂与障碍物发生碰撞。
5、一种典型的场景是在批量流多入口(通过多条传送带输送)包裹自动分拣装备中,待分拣包裹通过多个入口进入传送带。在位于传送带上某个包裹被标定为抓取目标的情况下,可能由于其他入口的包裹进入而构成障碍物,甚至造成包裹堆叠无法抓取。此外,在场景中可能还有工作人员,对包裹进行整理以便于机械臂准确分拣,这些工作人员同样构成机械臂的障碍物,甚至导致机械臂与工作人员发生碰撞的潜在风险。
技术实现思路
1、为解决前述问题,本发明提供了一种机械臂控制方法,能够在复杂障碍物环境下,特别是在多障碍物或移动障碍物环境下实现准确高效的抓取目标,避免与障碍物产生碰撞。
2、为了达到上述目的,本发明采用如下技术方案:
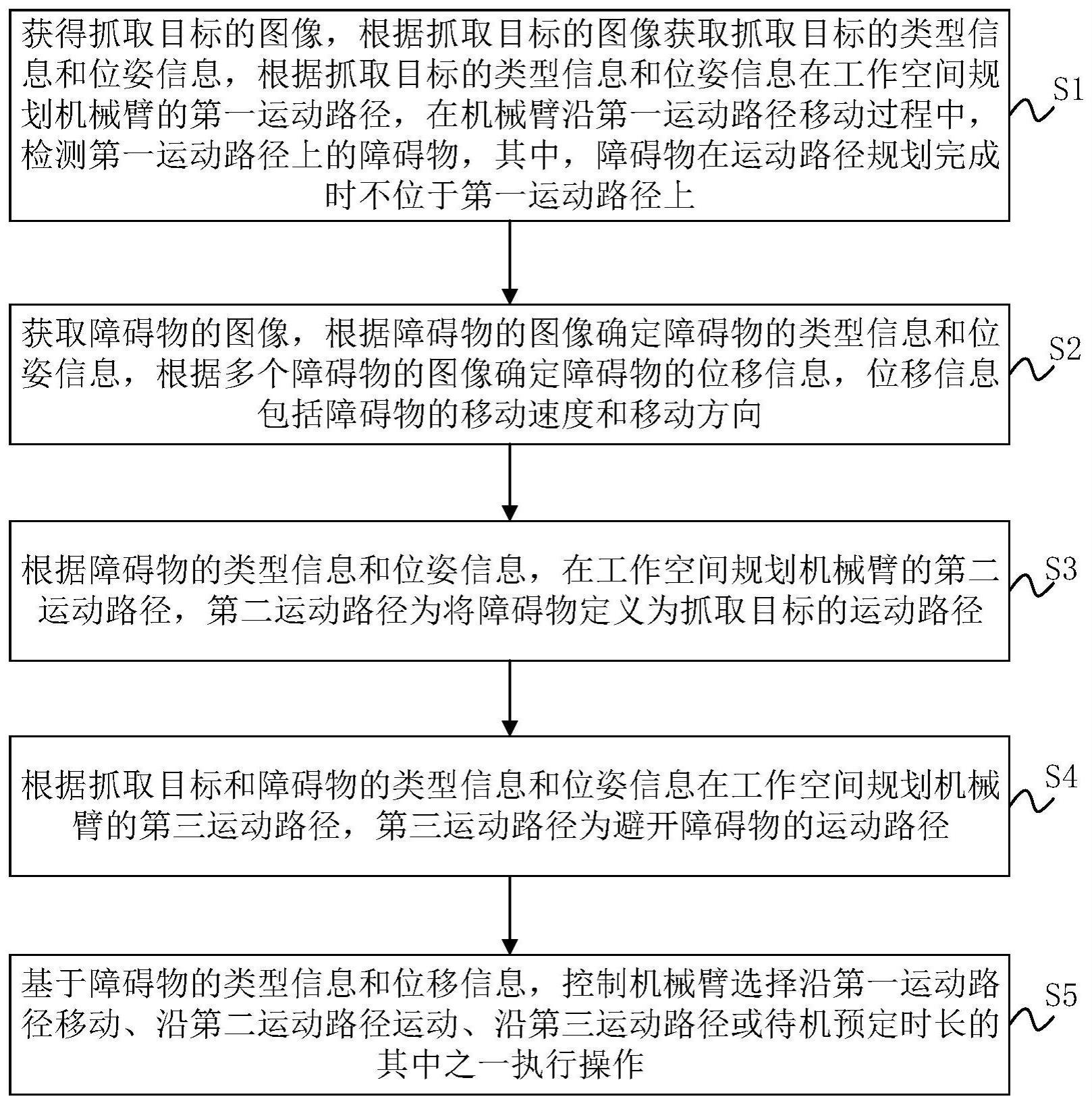
3、一种机械臂控制方法,包括:获得抓取目标的图像,根据抓取目标的图像获取抓取目标的类型信息和位姿信息,根据抓取目标的类型信息和位姿信息在工作空间规划机械臂的第一运动路径,在机械臂沿第一运动路径移动过程中,检测第一运动路径上的障碍物,其中,障碍物在运动路径规划完成时不位于第一运动路径上;获取障碍物的图像,根据障碍物的图像确定障碍物的类型信息和位姿信息,根据多个障碍物的图像确定障碍物的位移信息,位移信息包括障碍物的移动速度和移动方向;根据障碍物的类型信息和位姿信息,在工作空间规划机械臂的第二运动路径,第二运动路径为将障碍物定义为抓取目标的运动路径;根据抓取目标和障碍物的类型信息和位姿信息在工作空间规划机械臂的第三运动路径,第三运动路径为避开障碍物的运动路径;基于障碍物的类型信息和位移信息,控制机械臂选择沿第一运动路径移动、沿第二运动路径运动、沿第三运动路径或待机预定时长的其中之一执行操作。
4、可选的,当判断障碍物的类型信息与抓取目标不同,且位移信息不为静止,则控制机械臂执行待机预定时长,并检测第一运动路径上的障碍物。
5、可选的,当检测到第一运动路径上没有障碍物,或当判断障碍物的位移信息包括第一移动方向,且移动速度大于阈值,则控制机械臂选择沿第一运动路径移动执行操作。
6、可选的,当判断障碍物的类型信息和位移信息与抓取目标均相同时,控制机械臂选择沿第二运动路径移动执行操作。
7、可选的,当判断障碍物的类型信息与抓取目标不同,且位移信息为静止,控制机械臂选择沿第三运动路径移动执行操作。
8、可选的,采用人工势场法进行第三运动路径的路径规划,在机械臂选择沿第三运动路径移动时,若判断陷入局部最小值,则控制机械臂执行待机预定时长,并检测第三运动路径上的障碍物。
9、可选的,根据抓取目标的类型信息和位姿信息规划机械臂的运动路径包括如下子步骤:通过正运动模型获取机械臂的末端的位姿,通过逆运动模型获取每个旋转关节的角度和平移关节的位置,根据每个旋转关节的角度和平移关节的位置计算机械臂的运动路径。
10、可选的,由快速搜索随机树算法根据抓取目标在空间的位置规划机械臂的运动路径,包括如下步骤:步骤1,设置随机树t并初始化,设置初始位姿qinit,作为设置初始位姿qinit随机树t的根节点;步骤2,在随机树t的可延伸空间中,随机生成采样点qrand,其中采样点qrand在随机树t的可延伸空间中均匀分布的条件;步骤3,计算随机树t的根节点与采样点qrand之间的欧式距离度量的路径代价;步骤4,获得与采样点qrand距离最近的最近节点qnear;步骤5,在采样点qrand和最近节点qnear的路径上以固定步长从qnear出发获得一个新的节点qnew;步骤6,对于新的节点qnew相对于qrand与qnear的路径进行碰撞检测,若其中与障碍物发生冲突,则返回步骤2重新生成随机采样点qrand,并将当前的新节点qnew进行舍弃,若没有发生碰撞则保留qnew,并将其融入到随机树t中;步骤7:判断新生成节点qnew是否已经到达目标点qgoal,若到达目标位置则结束规划。
11、本发明所提供的机械臂控制方法,基于抓取目标的类型信息和位姿信息在工作空间规划机械臂的第一运动路径,在机械臂沿第一运动路径移动过程中,检测第一运动路径上的障碍物;然后,根据障碍物的类型信息和位姿信息,在工作空间规划机械臂的第二运动路径,第二运动路径为将障碍物定义为抓取目标的运动路径,以及根据抓取目标和障碍物的类型信息和位姿信息在工作空间规划机械臂的第三运动路径,第三运动路径为避开障碍物的运动路径;最后,基于障碍物的类型信息和位移信息,控制机械臂选择沿第一运动路径移动、沿第二运动路径运动、沿第三运动路径或待机预定时长的其中之一执行操作,从而能够在复杂障碍物环境下,特别是在多障碍物或移动障碍物环境下实现准确高效的抓取目标,避免与障碍物产生碰撞。
12、此外,本发明还提供了一种计算机设备,包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现上述任一项的方法。
13、同时,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现上述任一项的方法。
14、本发明的这些特点和优点将会在下面的具体实施方式以及附图中进行详细的揭露。本发明最佳的实施方式或手段将结合附图来详尽表现,但并非是对本发明技术方案的限制。另外,在每个下文和附图中出现的这些特征、要素和组件是具有多个,并且为了表示方便而标记了不同的符号或数字,但均表示相同或相似构造或功能的部件。
- 还没有人留言评论。精彩留言会获得点赞!