一种机器人主动救援控制方法及系统与流程
本发明涉及机器人控制,具体涉及一种机器人主动救援控制方法及系统。
背景技术:
1、智能地面移动机器人一种集成车辆控制技术,智能驾驶控制技术以及信息融合处理技术于一身,跨越机械,电子,计算机及自动控制等诸多学科,并且完全脱离人的直接控制,采用遥控、自主或半自主等方式在地面运动的机器人。
2、随着智能移动机器人技术不断发展,智能地面移动机器人已经被广泛应用于各种民用及军用场合,尤其是在野外搜救,沙漠沼泽探索以及各种战场环境等,由于适用环境多样,需要经常性的对机器人进行维护,且在执行任务的过程中也存在发生故障的风险,例如自身软硬件故障或陷入困境,导致无法依靠自身脱离困境,若长时间不对机器人进行召回,机器人将存在丢失风险。
3、现有技术中对机器人进行救援通常是从机器人基地指派一专业的救援机器人前往机器人所在处对故障机器人进行救援,然而,这样的救援方式显然存在救援等待时间过长的问题,无法快速对故障机器人进行救援。
技术实现思路
1、针对现有技术的不足,本发明的目的在于提供一种机器人主动救援控制方法及系统,旨在通过指定一救援机器人对发生故障的故障机器人进行救援,从而实现对故障机器人的快速救援。
2、本发明的第一方面在于提供一种机器人主动救援控制方法,所述方法包括:
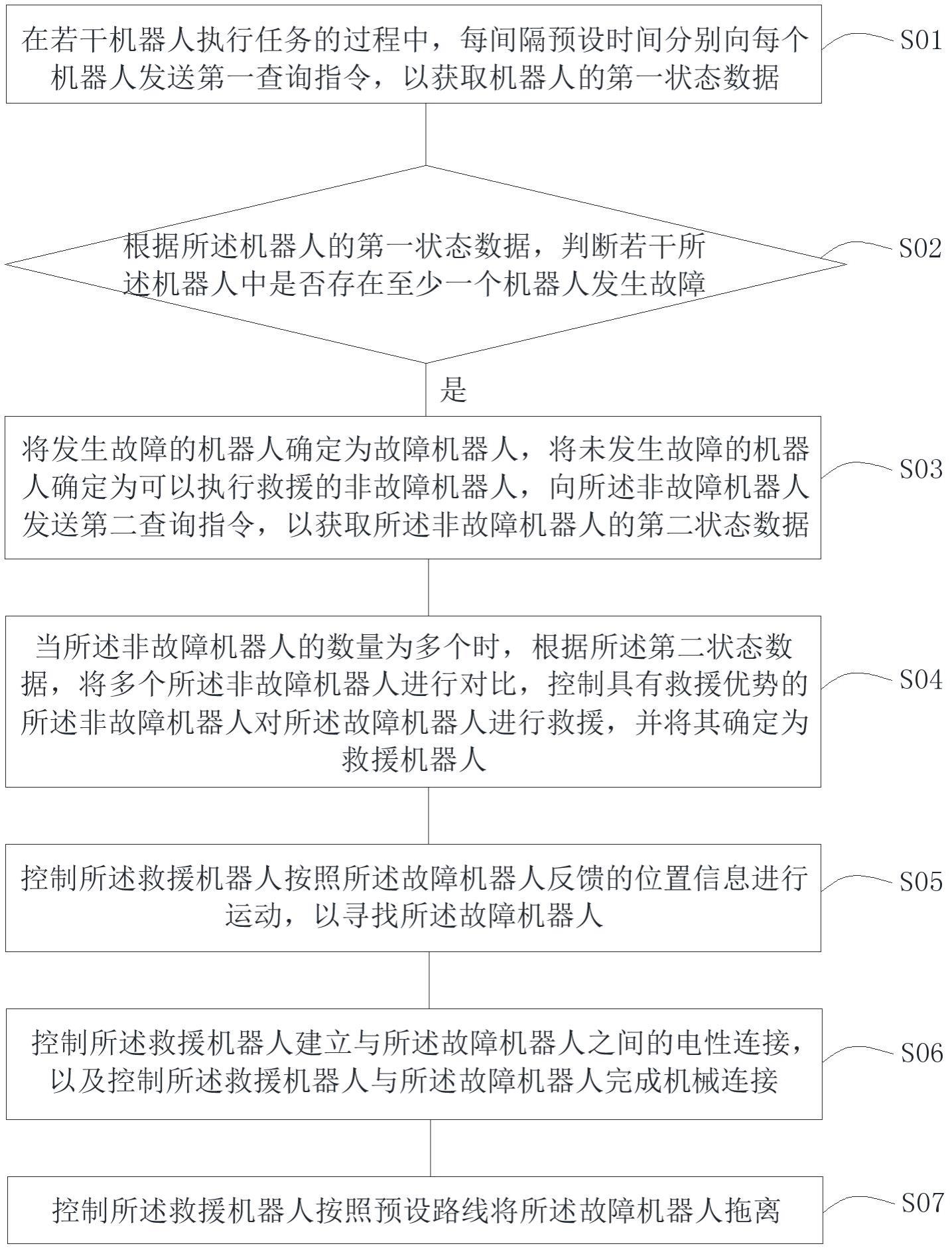
3、在若干机器人执行任务的过程中,每间隔预设时间分别向每个机器人发送第一查询指令,以获取机器人的第一状态数据;
4、根据所述机器人的第一状态数据,判断若干所述机器人中是否存在至少一个机器人发生故障;
5、若是,将发生故障的机器人确定为故障机器人,将未发生故障的机器人确定为可以执行救援的非故障机器人,向所述非故障机器人发送第二查询指令,以获取所述非故障机器人的第二状态数据;
6、当所述非故障机器人的数量为多个时,根据所述第二状态数据,将多个所述非故障机器人进行对比,控制具有救援优势的所述非故障机器人对所述故障机器人进行救援,并将其确定为救援机器人;
7、控制所述救援机器人按照所述故障机器人反馈的位置信息进行运动,以寻找所述故障机器人;
8、控制所述救援机器人建立与所述故障机器人之间的电性连接,以及控制所述救援机器人与所述故障机器人完成机械连接;
9、控制所述救援机器人按照预设路线将所述故障机器人拖离。
10、根据上述技术方案的一方面,在若干机器人执行任务的过程中,每间隔预设时间分别向每个机器人发送第一查询指令,以获取机器人的第一状态数据的步骤,具体包括:
11、在若干机器人执行任务的过程中,每隔预设时间分别向每个机器人发送第一状态查询指令;
12、获取每个机器人的第一状态数据,所述第一状态数据包括机器人的运行状态、故障状况与位置信息。
13、根据上述技术方案的一方面,根据所述机器人的第一状态数据,判断若干所述机器人中是否存在至少一个机器人发生故障的步骤,具体包括:
14、获取机器人的第一状态数据,对所述第一状态数据进行解析,得到数据解析结果;
15、根据所述数据解析结果,得到所述机器人的故障状况与运行状况;
16、根据所述机器人的故障状况与运行状况,判断若干个机器人中是否存在至少一个机器人发生故障;其中,所述故障包括硬件故障与软件故障。
17、根据上述技术方案的一方面,将发生故障的机器人确定为故障机器人,将未发生故障的机器人确定为可以执行救援的非故障机器人,向所述非故障机器人发送第二查询指令,以获取所述非故障机器人的第二状态数据的步骤中,所获取的第二状态数据至少包括所述拟派遣机器人的故障状况、剩余能源状况以及位置信息。
18、根据上述技术方案的一方面,当所述非故障机器人的数量为多个时,根据所述第二状态数据,将多个所述非故障机器人进行对比,控制具有救援优势的所述非故障机器人对所述故障机器人进行救援,并将其确定为救援机器人的步骤,具体包括:
19、当所述非故障机器人的数量为多个时;
20、根据所述第二状态数据中,将运行状态较好的所述非故障机器人的位置与剩余能源进行双重对比;
21、控制所述剩余能源大于一预设能源阈值、且与所述故障机器人之间距离最近的所述非故障机器人进行救援;
22、将所述非故障机器人确定为救援机器人。
23、根据上述技术方案的一方面,所述机器人均为轮式移动机器人。
24、根据上述技术方案的一方面,所述机器人之上设有机械救援连接装置与救援供电通信装置。
25、本发明的第二方面在于提供一种机器人主动救援控制系统,所述系统包括:
26、数据获取模块,配置为用于在若干机器人执行任务的过程中,每间隔预设时间分别向每个机器人发送第一查询指令,以获取机器人的第一状态数据;
27、故障识别模块,配置为用于根据所述机器人的第一状态数据,判断若干所述机器人中是否存在至少一个机器人发生故障;
28、调遣查询模块,配置为用于故障识别模块判断若干所述机器人中存在至少一个机器人发生故障时,将发生故障的机器人确定为故障机器人,将未发生故障的机器人确定为可以执行救援的非故障机器人,向所述非故障机器人发送第二查询指令,以获取所述非故障机器人的第二状态数据;
29、调遣指派模块,配置为用于当所述非故障机器人的数量为多个时,根据所述第二状态数据,将多个所述非故障机器人进行对比,控制具有救援优势的所述非故障机器人对所述故障机器人进行救援,并将其确定为救援机器人;
30、位置查找模块,配置为用于控制所述救援机器人按照所述故障机器人反馈的位置信息进行运动,以寻找所述故障机器人;
31、第一救援执行模块,配置为用于控制所述救援机器人建立与所述故障机器人之间的电性连接,以及控制所述救援机器人与所述故障机器人完成机械连接;
32、第二救援执行模块,配置为用于控制所述救援机器人按照预设路线将所述故障机器人拖离。
33、本发明的第三方面在于提供一种计算机可读存储介质,其上存储有计算机指令,该指令被处理器执行时实现上述技术方案当中所述方法的步骤。
34、本发明的第四方面在于提供一种计算机设备,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述技术方案当中所述方法的步骤。
35、与现有技术相比,采用本发明所示的机器人主动救援控制方法及系统,有益效果在于:
36、在机器人执行任务的过程中,通过向机器人发送第一查询指令以获取机器人的第一状态数据,根据第一状态数据判断机器人是否发生故障,若是,将发生故障的机器人确定为故障机器人,将未发生故障的机器人确定为非故障机器人,并向非故障机器人发送第二查询指令以获取非故障机器人的第二状态数据,根据第二状态数据确定一距离故障机器人最近的非故障机器人为救援机器人,控制救援机器人向故障机器人进行运动后与故障机器人进行对接,即可在对接之后通过救援机器人的运动实现对故障机器人的救援,从而能够解决现有技术中机器人发生故障或陷入险境之后无法脱困的问题。
- 还没有人留言评论。精彩留言会获得点赞!