一种归零装置、狭小空间螺钉连续自动拧紧结构及方法与流程
本发明属于螺钉锁紧,具体涉及一种基于视觉识别的狭小空间螺钉连续自动拧紧方法。
背景技术:
1、航天发动机生产过程中,推力室与电磁阀连接螺钉头规格为一字槽或外六方,单台推力装置紧固件数量多,需要按规定力矩值逐个拧紧,人工拧紧方式严重制约生产效率且一致性差。
2、目前,出现了一种螺钉自动认帽及自动拧紧方法,劈头压紧螺钉帽后旋转,落入一字槽或外六方内完成认帽,而后通过工业机器人施力拧紧。但此方法通过劈头与螺帽接触摩擦完成认帽,极易造成螺钉帽表面划伤问题。另外紧固件安装位置靠近电磁阀阀身,操作空间狭小,拧紧过程容易产生磕碰,无法满足航天产品对安全性的要求。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提供了一种基于视觉识别的狭小空间螺钉连续自动拧紧方法,归零过程不会对待拧工件表面产生划伤,并能够在狭小操作空间内拧紧,且拧紧过程不容易产生磕碰,克服了现有的螺钉认帽及自动拧紧方法不适用于航天发动机产品的问题。
2、本发明的技术解决方案是:
3、第一方面,提供了一种拧紧轴归零装置,包括基板、传感器、与传感器连接的控制机构;基板表面开设有定位槽,定位槽的形状与劈头形状配合;传感器位于定位槽底部,劈头落入定位槽内时,触发传感器,传感器将信号反馈给控制机构,控制机构控制劈头停止转动。
4、第二方面,提供了一种狭小空间螺钉连续自动拧紧结构,包括工业机器人、拧紧轴、劈头、权利要求1所述的拧紧轴归零装置、视觉识别系统,工业机器人与拧紧轴和视觉识别系统连接,劈头与拧紧轴连接,工业机器人用于带动拧紧轴转动和移动,劈头用于与待拧工件配合,以带动待拧工件转动而被拧紧;归零装置用于对劈头进行角度归零;视觉识别系统用于获得待拧工件的初始角度位置,以确定归零后的劈头转动至与待拧工件的螺帽配合时、需要转动的初始调整角。
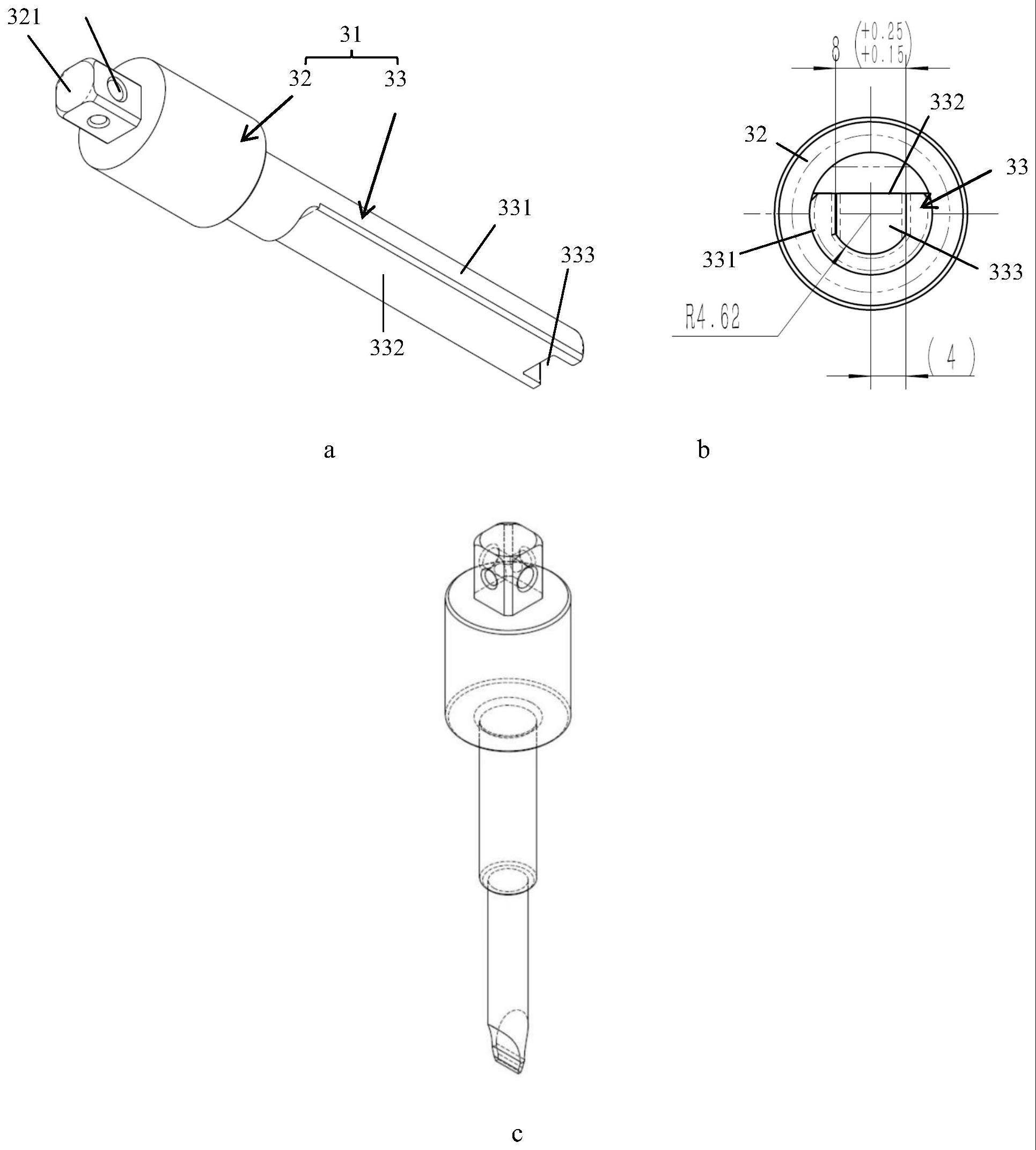
5、所述劈头包括连接部、主体部,连接部的一端与拧紧轴可拆卸连接、另一端与主体部连接,主体部与待拧工件的螺帽配合、以带动螺帽转动。
6、所述所述待拧工件的螺帽为外六方时,劈头为半圆劈头,半圆劈头为主体部垂直于自身高度方向的截面由优弧和连接优弧两端的直线段构成,主体部远离连接部的端部开设有容置槽,容置槽沿着劈头转轴轴线防线延伸、且贯穿至主体部截面的直线段所在的内侧平面;
7、容置槽设置有相平行的两个内壁、以及设置于两个内壁之间的过渡面,六角螺帽相对的两个平行侧面卡设于该该两个内壁之间、且六角螺帽的一个顶角与过渡面接触时,六角螺帽的轴线与劈头的转动轴线重合;定位槽为与主体部端部配合的半圆形定位槽。
8、所述待拧工件的螺帽为一字槽时,劈头为一字劈头;一字劈头端部为一字形状;定位槽为与待拧工件端部配合的一字形定位槽。
9、所述拧紧轴包括外轴和内轴两部分,工业机器人与外轴为硬连接,外轴套设于内轴外侧、且内轴沿着自身轴线方向与外轴滑动连接,外轴和内轴之间通过弹簧进行软连接。
10、所述外轴内设置有沿轴线依次设置的第一腔室和第二腔室,第一腔室的内径大于第二腔室的内径,内轴包括依次连接的安装段、细段、限位段,安装段位于第二腔室内、并与第二腔室的内径配合,安装段的一端伸出外轴,且安装段伸出外轴的端部用于连接劈头;限位段位于第二腔室内、且于第二腔室的内径相配合,限位段的外径大于第一腔室的外径,保证了内轴不会从外轴脱出;细段位于安装段和限位段之间,细段的外径小于安装段的外径,弹簧套设于细段外部,且弹簧的一端连接于安装段的端面、另一端于外轴的内壁固定连接。
11、所述连接部的端部设置有外四方的插入部,插入部开设有与劈头转轴垂直的连接孔,拧紧轴的端部设置有安装槽和安装孔,插入部插入安装槽内,且通过销轴插入连接孔和安装孔中。
12、第三方面,提供了一种狭小空间螺钉连续自动拧紧方法,使用上述任一所述的一种狭小空间螺钉连续自动拧紧结构,包括:
13、s1:工业机器人将拧紧轴移动到待拧工件上方,视觉识别系统中的工业相机对待拧工件的螺帽进行拍照获得螺帽图像;
14、s2:根据螺帽图像,获得螺帽当前位置角度;
15、s3:根据待拧工件的螺帽形状,选择对应的劈头并将劈头安装于拧紧轴端部,工业机器人将拧紧轴移动到归零装置位置进行劈头的角度归零;
16、s4:控制系统根据螺帽当前位置角度、以及劈头归零状态的位置角度,计算获得劈头劈头能够与待拧工件的螺帽配合时、劈头需要转动的初始调整角;
17、s5:工业机器人按预设点位将归零完毕的劈头移动到待拧螺钉上方,然后按照初始调整角转动后,使拧紧轴竖直下降,劈头精准与待拧工件的螺帽配合,然后工业机器人带动劈头转动,劈头带动待拧工件转动进行单次拧紧,劈头的单次拧紧角度最大为60°;
18、s6:劈头单次拧紧结束后,停止转动,工业机器人带动劈头上移与待拧工件脱离,然后根据劈头当前的位置角度和待拧工件螺帽的位置角度,获得劈头需要转动的中间调整角,劈头按照中间调整角反向转动并下移到与待拧工件的螺帽配合,然后继续进行单次拧紧;
19、s7:在控制系统控制下,重复进行s6,直到达到预设力矩值,实现狭小空间螺钉连续自动拧紧。
20、所述步骤s3中,劈头的角度归零包括:
21、工业机器人将拧紧轴和劈头移动到相应定位槽正上方,相应定位槽的形状与劈头主体部端面形状相同;
22、工业机器人带动拧紧轴竖直下降,直到劈头与基板表面接触,同时工业机器人带动劈头转动,直到劈头与定位槽完全正对时,拧紧轴中弹簧将劈头压入到相应定位槽内,劈头触发定位槽底安装的传感器,传感器将信号传递给控制系统,控制系统控制拧紧轴停止旋转,完成归零。
23、该方法基于视觉识别技术,通过非接触式手段实现拧紧轴上劈头精准落入螺钉一字槽或外六方,完成认帽。对于外六方螺钉,将拧紧轴劈头设计成半圆形,以适应电磁阀附近狭小空间拧紧要求。多个紧固件连续拧紧时,由于螺钉上料时一字槽角度具有随机性,相应按力矩拧紧后,拧紧轴角度也具有随机性,拧紧下一紧固件时,需要对拧紧轴进行归零操作。因此,为了实现多个紧固件连续自动拧紧,本发明同时提供了一种拧紧轴归零装置及方法,辅助工业机器人按视觉识别系统捕获的角度信息连续自动拧紧。
24、根据本发明提供的一种基于视觉识别的狭小空间螺钉连续自动拧紧方法,具有以下有益效果:
25、(1)本发明提供一种狭小空间下螺钉连续自动拧紧方法,基于视觉识别技术,通过非接触式手段完成认帽,避免了传统认帽方法可能损伤螺钉的问题。
26、(2)本发明提供一种狭小空间下螺钉连续自动拧紧方法,多个紧固件连续拧紧时,由拧紧轴归零装置辅助工业机器人完成连续自动拧紧,无需人工干涉,该归零装置对各规格紧固件均适用。
27、(3)本发明提供一种狭小空间下螺钉连续自动拧紧方法,对于外六方螺钉,将拧紧轴劈头设计成半圆形,满足了电磁阀附近狭小空间拧紧要求。
28、(4)本发明提供一种外六方螺钉拧紧轴劈头,通过表面镀硬铬,提升劈头整体强度,延长劈头使用寿命。
- 还没有人留言评论。精彩留言会获得点赞!