一种基于张拉整体结构的仿生前臂外骨骼助力机构
本发明涉及仿生工程,可应用于机器人、可穿戴外骨骼等研究领域,更具体的说是涉及一种基于张拉整体结构的仿生前臂外骨骼助力机构。
背景技术:
1、机器人在科学探索、航空航天、交通运输、设备维护、社交娱乐以及康复医疗等领域均具有良好的应用前景,因为其具有灵活性高和自适应的特点,具有非常大的应用前景和良好的经济效益。
2、在康复医疗中,前臂助力外骨骼帮助脑卒中患者,偏瘫患者进行上肢康复训练。但是,现有的上肢外骨骼机构具有很多局限性,首先在驱动设备上不可避免的需要外置庞大并且沉重的电机或电池等,其次在现有的设计中如果采用刚性构件,在工作时设备可能会由于应力集中导致损坏,而柔性构件在工作时无法给佩戴者提供较为精准的助力,且控制系统复杂,操控不便。
3、因此,提供一种兼具稳定性、灵活性、轻量化、准确性并且可以自适应的基于张拉整体结构的仿生前臂外骨骼助力机构是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种基于张拉整体结构的仿生前臂外骨骼助力机构,以解决传统可穿戴机械手臂存在的设备沉重、结构复杂和刚性不便穿戴等技术问题。
2、为了实现上述目的,本发明采用如下技术方案:
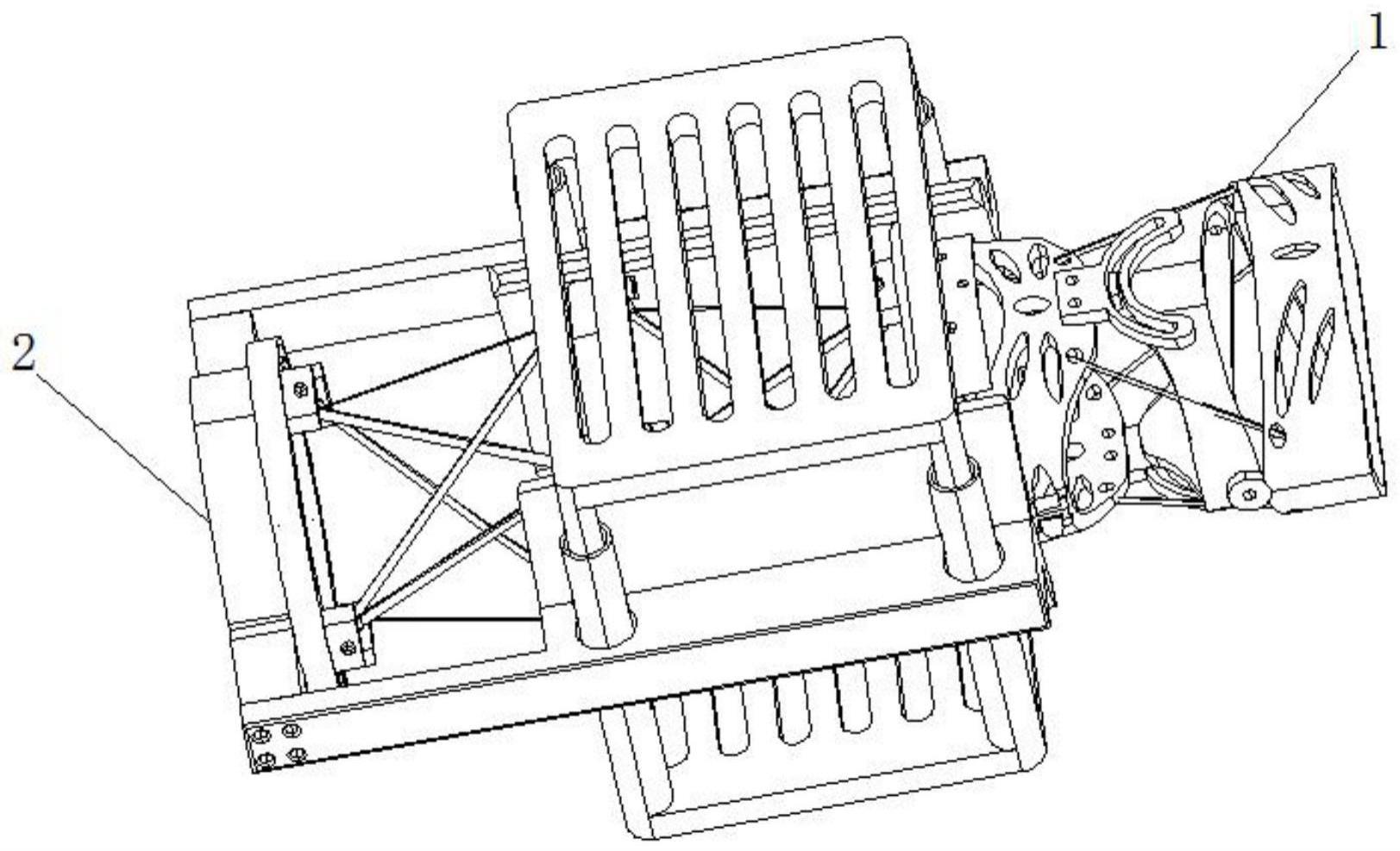
3、一种基于张拉整体结构的仿生前臂外骨骼助力机构,包括从前到后依次连接的两杆张拉手腕机构和四杆张拉前臂机构。
4、进一步的,所述两杆张拉手腕机构包括从前到后依次分布的手腕第一套筒、链接套筒、滑道连接件和手腕第二套筒,所述手腕第一套筒后端与所述链接套筒前端转动连接;所述滑道连接件前端与所述链接套筒后端的滑块滑动连接;所述手腕第二套筒前端与所述滑道连接件后端固定连接;所述手腕第二套筒后端与所述四杆张拉前臂机构固定连接;所述手腕第一套筒和所述手腕第二套筒之间通过四个前后左右对称分布的手腕弹性体连接。
5、进一步的,所述四杆张拉前臂机构包括从前到后依次间隔分布的前部固定环、转动环和后部固定环,所述手腕第二套筒后端与所述前部固定环固定连接;所述前部固定环与所述转动环之间通过第一张拉组件连接;所述后部固定环与所述转动环之间通过第二张拉组件连接,且所述第一张拉组件与所述第二张拉组件以所述转动环为中心对称分布。
6、进一步的,所述第一张拉组件包括四个前部旋转支杆和四个前部弹性体,每个所述前部旋转支杆的两端分别链接在所述前部固定环和所述转动环上;每个所述前部弹性体的两端分别链接在所述前部固定环和所述转动环上,且四个所述前部旋转支杆和四个所述前部弹性体交错分布;所述第二张拉组件包括四个后部旋转支杆和四个后部弹性体,每个所述后部旋转支杆的两端分别链接在所述后部固定环和所述转动环上;每个所述后部弹性体的两端分别链接在所述后部固定环和所述转动环上,且四个所述后部旋转支杆和四个所述后部弹性体交错分布;四个所述后部旋转支杆与四个所述前部旋转支杆以所述转动环为中心对称分布,四个所述后部弹性体与四个所述前部弹性体以所述转动环为中心对称分布。
7、进一步的,所述后部固定环沿周向固定有均匀分布的第一球铰固定块、第二球铰固定块、第三球铰固定块和第四球铰固定块,所述转动环一侧沿周向固定有均匀分布的第五球铰固定块、第六球铰固定块、第七球铰固定块和第八球铰固定块,且所述第五球铰固定块、所述第六球铰固定块、所述第七球铰固定块和所述第八球铰固定块分别与所述第一球铰固定块、所述第二球铰固定块、所述第三球铰固定块和所述第四球铰固定块错位分布;四个所述后部旋转支杆沿周向顺序分别为后部第一旋转支杆、后部第二旋转支杆、后部第三旋转支杆和后部第四旋转支杆,四个所述后部弹性体沿周向顺序分别为后部第一弹性体、后部第二弹性体、后部第三弹性体和后部第四弹性体;所述后部第一旋转支杆的两端分别与所述第一球铰固定块和所述第七球铰固定块铰接;所述后部第二旋转支杆的两端分别与所述第二球铰固定块和所述第六球铰固定块铰接;所述后部第三旋转支杆的两端分别与所述第三球铰固定块和所述第五球铰固定块铰接;所述后部第四旋转支杆的两端分别与所述第四球铰固定块和所述第八球铰固定块铰接;所述后部第一弹性体的两端分别与所述第一球铰固定块和所述第六球铰固定块铰接;所述后部第二弹性体的两端分别与所述第二球铰固定块和所述第五球铰固定块铰接;所述后部第三弹性体的两端分别与所述第三球铰固定块和所述第八球铰固定块铰接;所述后部第四弹性体的两端分别与所述第四球铰固定块和所述第七球铰固定块铰接;
8、所述转动环另一侧沿周向固定有均匀分布的第九球铰固定块、第十球铰固定块、第十一球铰固定块和第十二球铰固定块,且所述第九球铰固定块、所述第十球铰固定块、所述第十一球铰固定块和所述第十二球铰固定块分别与所述第五球铰固定块、所述第六球铰固定块、所述第七球铰固定块和所述第八球铰固定块对称分布;所述前部固定环沿周向固定有均匀分布的第十三球铰固定块、第十四球铰固定块、第十五球铰固定块和第十六球铰固定块,且所述第十三球铰固定块、所述第十四球铰固定块、所述第十五球铰固定块和所述第十六球铰固定块分别与所述第一球铰固定块、所述第二球铰固定块、所述第三球铰固定块和所述第四球铰固定块对称分布;四个所述前部旋转支杆沿周向顺序分别为前部第一旋转支杆、前部第二旋转支杆、前部第三旋转支杆和前部第四旋转支杆,四个所述前部弹性体沿周向顺序分别为前部第一弹性体、前部第二弹性体、前部第三弹性体和前部第四弹性体;所述前部第一旋转支杆的两端分别与所述第九球铰固定块和所述第十五球铰固定块铰接;所述前部第二旋转支杆的两端分别与所述第十球铰固定块和所述第十四球铰固定块铰接;所述前部第三旋转支杆的两端分别与所述第十一球铰固定块和所述第十三球铰固定块铰接;所述前部第四旋转支杆的两端分别与所述第十二球铰固定块和所述第十六球铰固定块铰接;所述前部第一弹性体的两端分别与所述第九球铰固定块和所述第十六球铰固定块铰接;所述前部第二弹性体的两端分别与所述第十球铰固定块和所述第十五球铰固定块铰接;所述前部第三弹性体的两端分别与所述第十一球铰固定块和所述第十四球铰固定块铰接;所述前部第四弹性体的两端分别与所述第十二球铰固定块和所述第十三球铰固定块铰接。
9、进一步的,所述四杆张拉前臂机构还包括第一固定罩板、第二固定罩板和支撑连接架,所述第一固定罩板两端分别与所述前部固定环和所述后部固定环固定连接;所述第二固定罩板两端分别与所述前部固定环和所述后部固定环固定连接,且所述第一固定罩板和所述第二固定罩板对称分布;所述转动环分别与所述第一固定罩板和所述第二固定罩板滑动连接;所述第一固定罩板和所述第二固定罩板通过所述支撑连接架连接。
10、进一步的,所述支撑连接架包括第一架体和第二架体,所述第一架体贯穿固定在所述第一固定罩板和所述第二固定罩板上;所述第二架体插设于所述第一架体内并通过螺栓固定。
11、经由上述的技术方案可知,与现有技术相比,本发明公开提出了一种基于张拉整体结构的仿生前臂外骨骼助力机构,将张拉结构与仿生前臂外骨骼助力设备相结合,通过仿生分析建立前臂以及腕关节的张拉结构映射,并且研究并分析人体上肢结构特征和关节运动特性,确定结构参数和运动参数,整体上利用张拉结构能够依靠自身结构可以适应环境并保持自平衡自稳定的特点,很巧妙的解决了外骨骼助力设备设计的重要问题,可以更好的与人体前臂运动过程中进行贴合,同时具有轻量化,便于穿戴等特点,基于张拉技术所设计的仿生外骨骼机器人不仅可以起到身体支撑的作用,更可以辅助肢体运动,还有结构轻巧、穿戴方便、操作柔顺,同时保证穿戴的舒适性和安全性等优点。
- 还没有人留言评论。精彩留言会获得点赞!