一种结合工业互联网技术的塑胶模具机械手的制作方法
本发明涉及一种机械手。
背景技术:
1、塑胶模具是用于制造塑料制品的工具,在塑胶注塑生产线中通常采用机械手来完成塑胶模具的取出、放置和堆垛等操作,可以提高生产效率,降低员工的劳动强度和安全风险;
2、现有的塑胶模具机械手包括抓取物料的取料头,和带动取料头移动的机械臂;取料头与机械臂之间大多都是通过固定螺丝拧紧从而完成组装;这种取料头更换时往往需要借助各种工具花费大量时间才能完成拆卸,极大的降低了机械手臂与取料头的拆卸效率,更换十分麻烦,费时费力。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种结合工业互联网技术的塑胶模具机械手。
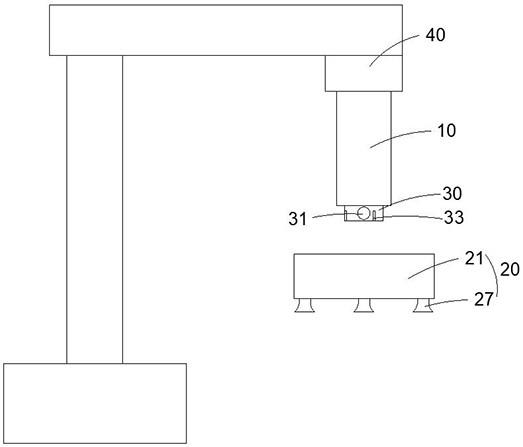
2、本发明解决其技术问题所采用的技术方案是:一种结合工业互联网技术的塑胶模具机械手,包括机械臂、与所述机械臂可拆卸连接的取料头和控制器,其特征在于,所述机械臂的一自由端设有旋转座;所述取料头包括基座和设置于所述基座底部的吸料组件;所述基座上设有供所述旋转座插入的安装槽,和将所述旋转座锁紧的在所述安装槽内的锁紧组件;所述机械手还包括控制所述吸料组件取料或放料,并控制所述锁紧组件锁紧或解锁的吸附控制组件;所述机械臂、所述取料头和所述吸附控制组件均与所述控制器电连接并受其控制;
3、本发明所述的机械手,其中,所述锁紧组件包括多组锁扣单元;所述基座内设有多个与所述安装槽相连通的滑槽;多个所述滑槽依次沿所述安装槽的外圆周周向分布;所述旋转座的外侧表面周向设置有多个与所述滑槽一一对应并与其相连通的锁孔;所述滑槽内设有活动锁舌,和对所述活动锁舌及所述基座提供弹性力的第一复位组件;所述活动锁舌、所述第一复位组件及所述锁孔构成一组所述锁扣单元;所述旋转座与所述基座装配到位时,所述吸附控制组件控制多组所述锁扣单元中的所述活动锁舌部分插入所述锁孔;
4、本发明所述的机械手,其中,所述第一复位组件包括复位弹簧;所述复位弹簧的一端与所述滑槽的内侧壁固定连接,另一端与所述活动锁舌远离所述安装槽的一端固定连接;
5、本发明所述的机械手,其中,所述第一复位组件包括两个相互磁吸的磁铁,其一所述磁铁固定安装于所述活动锁舌远离所述安装槽的一端端面;另一所述磁铁固定安装于所述滑槽的内侧壁上;
6、本发明所述的机械手,其中,所述机械臂内沿其长度方向设有第一气路通道;所述旋转座的中心轴向穿设有与所述第一气路通道相连通的第二气路通道;多个所述锁孔均通过所述第二气路通道与所述第一气路通道气路连通;
7、本发明所述的机械手,其中,所述第一气路通道内设有切断或连通所述锁孔与所述第一气路通道流通气路的切换组件;
8、本发明所述的机械手,其中,所述切换组件包括活动设置于所述第一气路通道内的内管,和对所述内管及所述机械臂提供弹性力的第二复位组件;所述第二复位组件为自由状态时,所述内管不受所述吸附控制组件的控制,并伸入所述第二气路通道内将所述锁孔堵住;所述吸附控制组件控制所述内管远离所述旋转座时,所述第二复位组件为非自由状态,所述锁孔与所述第一气路通道相连通;
9、本发明所述的机械手,其中,所述吸料组件包括多个吸嘴;多个所述吸嘴通过第三气路通道与所述安装槽相连通;所述第三气路通道内还设有朝所述安装槽方向打开的电磁阀门;
10、本发明所述的机械手,其中,所述吸附控制组件包括固定安装于所述机械臂上的负压缸、气管以及控制所述负压缸抽气压力的驱动机构;所述负压缸通过气管与所述第一气路通道相连通并抽取所述第一气路通道内的空气;
11、本发明所述的机械手,其中,所述旋转座朝向所述取料头的一端的外侧表面周向设置有多个定位部;所述安装槽的内侧壁设有多个与所述定位部一一对应并供其插入的定位槽。
12、本发明的有益效果在于:该结合工业互联网技术的塑胶模具机械手结构设计巧妙,拆装方便,安装时,将机械臂上的旋转座插入取料头上的安装槽内,再通过吸附控制组件控制基座上的锁紧组件将旋转座固定锁紧,即可实现机械臂与取料头固定安装;拆卸时,吸附控制组件控制基座上的锁紧组件解锁就可将取料头从机械臂上取下,取料头的换取及维修都十分方便,工作效率高,省时省力。
技术特征:
1.一种结合工业互联网技术的塑胶模具机械手,包括机械臂、与所述机械臂可拆卸连接的取料头和控制器,其特征在于,所述机械臂的一自由端设有旋转座;所述取料头包括基座和设置于所述基座底部的吸料组件;所述基座上设有供所述旋转座插入的安装槽,和将所述旋转座锁紧的在所述安装槽内的锁紧组件;所述机械手还包括控制所述吸料组件取料或放料,并控制所述锁紧组件锁紧或解锁的吸附控制组件;所述机械臂、所述取料头和所述吸附控制组件均与所述控制器电连接并受其控制。
2.根据权利要求1所述的机械手,其特征在于,所述锁紧组件包括多组锁扣单元;所述基座内设有多个与所述安装槽相连通的滑槽;多个所述滑槽依次沿所述安装槽的外圆周周向分布;所述旋转座的外侧表面周向设置有多个与所述滑槽一一对应并与其相连通的锁孔;所述滑槽内设有活动锁舌,和对所述活动锁舌及所述基座提供弹性力的第一复位组件;所述活动锁舌、所述第一复位组件及所述锁孔构成一组所述锁扣单元;所述旋转座与所述基座装配到位时,所述吸附控制组件控制多组所述锁扣单元中的所述活动锁舌部分插入所述锁孔。
3.根据权利要求2所述的机械手,其特征在于,所述第一复位组件包括复位弹簧;所述复位弹簧的一端与所述滑槽的内侧壁固定连接,另一端与所述活动锁舌远离所述安装槽的一端固定连接。
4.根据权利要求2所述的机械手,其特征在于,所述第一复位组件包括两个相互磁吸的磁铁,其一所述磁铁固定安装于所述活动锁舌远离所述安装槽的一端端面;另一所述磁铁固定安装于所述滑槽的内侧壁上。
5.根据权利要求3或4所述的机械手,其特征在于,所述机械臂内沿其长度方向设有第一气路通道;所述旋转座的中心轴向穿设有与所述第一气路通道相连通的第二气路通道;多个所述锁孔均通过所述第二气路通道与所述第一气路通道气路连通。
6.根据权利要求5所述的机械手,其特征在于,所述第一气路通道内设有切断或连通所述锁孔与所述第一气路通道流通气路的切换组件。
7.根据权利要求6所述的机械手,其特征在于,所述切换组件包括活动设置于所述第一气路通道内的内管,和对所述内管及所述机械臂提供弹性力的第二复位组件;所述第二复位组件为自由状态时,所述内管不受所述吸附控制组件的控制,并伸入所述第二气路通道内将所述锁孔堵住;所述吸附控制组件控制所述内管远离所述旋转座时,所述第二复位组件为非自由状态,所述锁孔与所述第一气路通道相连通。
8.根据权利要求7所述的机械手,其特征在于,所述吸料组件包括多个吸嘴;多个所述吸嘴通过第三气路通道与所述安装槽相连通;所述第三气路通道内还设有朝所述安装槽方向打开的电磁阀门。
9.根据权利要求8所述的机械手,其特征在于,所述吸附控制组件包括固定安装于所述机械臂上的负压缸、气管以及控制所述负压缸抽气压力的驱动机构;所述负压缸通过气管与所述第一气路通道相连通并抽取所述第一气路通道内的空气。
10.根据权利要求1所述的机械手,其特征在于,所述旋转座朝向所述取料头的一端的外侧表面周向设置有多个定位部;所述安装槽的内侧壁设有多个与所述定位部一一对应并供其插入的定位槽。
技术总结
本发明涉及一种结合工业互联网技术的塑胶模具机械手,包括机械臂、取料头和控制器,该结合工业互联网技术的塑胶模具机械手结构设计巧妙,拆装方便,安装时,将机械臂上的旋转座插入取料头上的安装槽内,再通过吸附控制组件控制基座上的锁紧组件将旋转座固定锁紧,即可实现机械臂与取料头固定安装;拆卸时,吸附控制组件控制基座上的锁紧组件解锁就可将取料头从机械臂上取下,取料头的换取及维修都十分方便,工作效率高,省时省力。
技术研发人员:张树刚,阮友德,张金鼎
受保护的技术使用者:鹰星精密工业(深圳)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!