机械臂手眼标定坐标转换方法与流程
本技术涉及机器视觉系统领域,具体而言,涉及一种机械臂手眼标定坐标转换方法。
背景技术:
1、目前,机器视觉的目的是期望从摄像获取带噪声,畸变的二维图像出发,计算出三维空间物体的几何信息,并在这些几何信息的基础上实现对三维空间物体的识别、测量和控制,以此得出完整的场景理解,恢复世界三维构造。要完成上述任务首先必须知道二维图像与三维空间物体之间的关系,而决定它们之间关系的是摄像机成像几何模型,确定模型参数的过程称为摄像机标定。摄像机标定要确定的模型参数包括描述摄像机内部几何和光学特性的内参数和描述其相对于参考坐标系的位置和姿态(位姿)的外参数。
2、在机器视觉的标定方面,传统的方法一般采用最小二乘法和豪斯霍尔德变换法等数据处理的方法来滤除数据噪声,得到摄像机的3d空间场景与2d图像平面之间的变换关系,由于变量间存在约束关系,上述方法求解得到的投影矩阵来分解内、外参数时,有较大的误差。其次,固定双目立体视觉因为其摄像机固定的结构特点,拍摄范围有限,在摄像机安装之后就限定了机械臂的运动空间,导致采集数据样本分布过于集中,可能得到过多线性相关的无效数据,导致标定误差的增大。
技术实现思路
1、本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提出一种机械臂手眼标定坐标转换方法,所述机械臂手眼标定坐标转换方法具有结构简单、成本低、安装工序少、安全可靠、节能、使用要求低、适用性强。
2、根据本技术实施例的机械臂手眼标定坐标转换方法,包括:
3、机器人移动平台用于在温室环境下自主运动;
4、机械臂控制模块用于机械臂的移动控制;
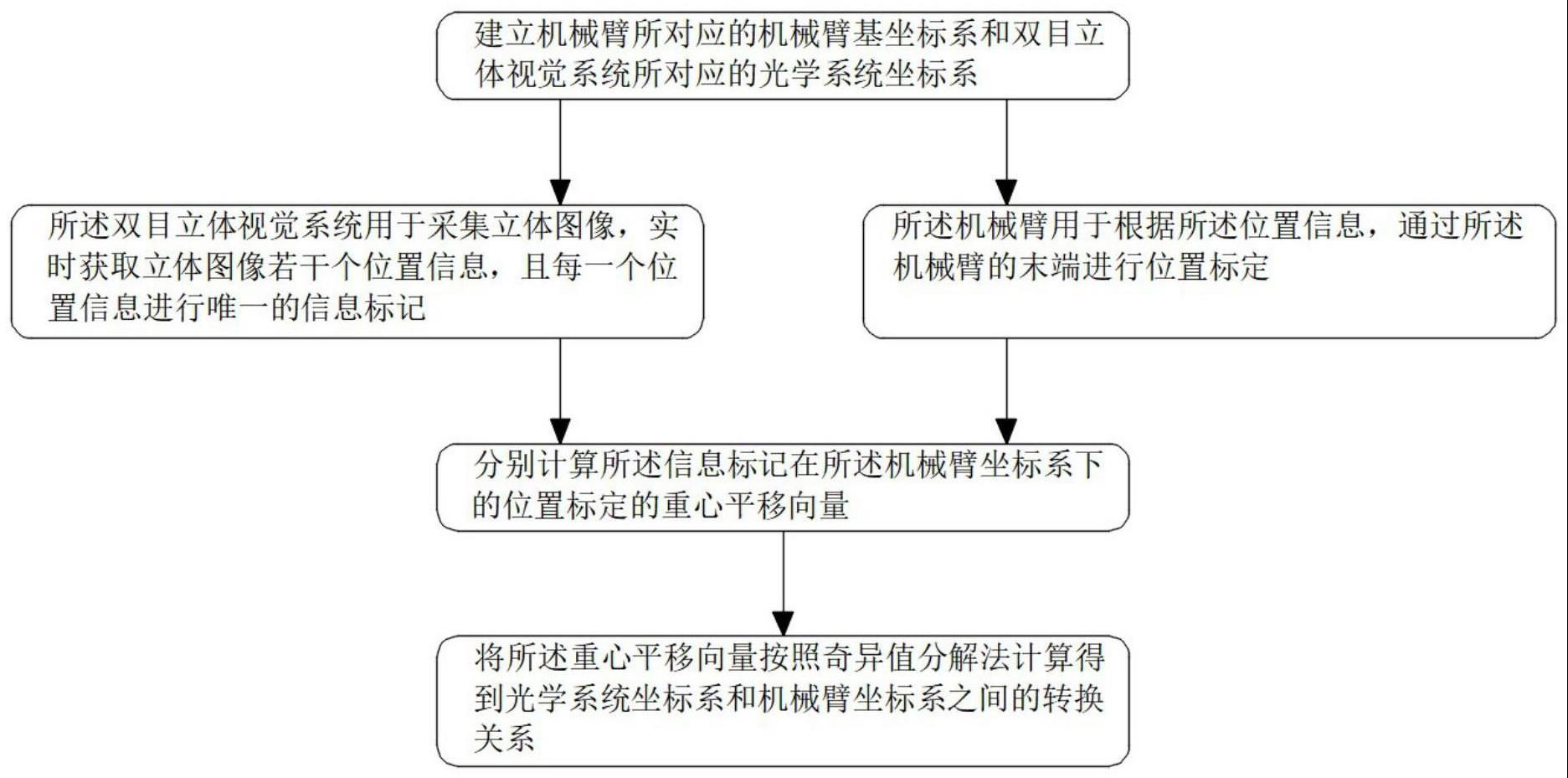
5、建立机械臂所对应的机械臂基坐标系和双目立体视觉系统所对应的光学系统坐标系;
6、所述双目立体视觉系统用于采集立体图像,实时获取立体图像若干个位置信息,且每一个位置信息进行唯一的信息标记;
7、所述机械臂用于根据所述位置信息,通过所述机械臂的末端进行位置标定;
8、分别计算所述信息标记在所述机械臂坐标系下的位置标定的重心平移向量;
9、将所述重心平移向量按照奇异值分解法计算得到光学系统坐标系和机械臂坐标系之间的转换关系。
10、根据本技术实施例的机械臂手眼标定坐标转换方法,将视觉传感器安装在机器人末端执行器上,构成机器人的手眼系统。机器人手眼系统中视觉传感器的安装方式有很多,根据机器人末端执行器和视觉传感器安装位置与之间的关系可概括为eye-in-hand(eye-in-hand,眼在手上)和eye-to-hand(eye-to-hand,眼在手外)两种。eye-in-hand系统的视觉传感器安装在机器人末端执行器上,视觉传感器会随着机器人末端执行器的运动而运动,随着摄像机随机械臂接近目标,摄像机测量的绝对误差随之减小。在eye-in-hand中,可以采用基于图像的视觉控制和基于位置的视觉控制或者结合两者混合视觉控制三种方式。基于图像视觉控制,图像空间形成闭环,摄像机的标定误差被大幅度降低,因此对摄像机精度要求相对不高,基于位置视觉控制,摄像机的标定误差不能在控制系统中有效降低,但随着机械臂与目标距离的接近,绝对误差降低,即使摄像机标定存在误差,也能够满足应用要求。同样的,混合视觉控制对标定误差和摄像机精度的近百度范围要求都不是特别严格,一般都能满足应用要求。例如立体视觉机器人,该系统属于场景视觉系统,视觉系统与机器人可以通过程序控制进行偏转和倾斜,并且能够在两台摄像机之间进行不同的距离调整以适应实际需要,摄像机安装在机器人以外的场景中,除了控制视觉系统运动还可以采用变倍,变焦和带光圈的摄像机,系统工作时,可以通过编码器实时检测和控制摄像机的姿态、参数,实现对目标模型重建识别。在基于结构光的机器视觉中,结构光由激光器投射光点、光条或光面到工件表面,经过镜头、摄像机等采集图像,通过图像处理进行特征提取,由于光源的特性可以预先获得光照信息,然后根据三角测量原理求取特征点的三维坐标信息,结构光视觉可以简化图像处理中的特征提取,大幅度提高图像处理速度,具有良好的实时性。
11、另外,根据本技术实施例的机械臂手眼标定坐标转换方法还具有如下附加的技术特征:
12、在本发明的一种优选方式中,所述双目立体视觉系统包括:黑摄像机和白摄像机;双通道视觉实时处理器,与所述黑摄像机以及所述白摄像机连接,用于完成两路视频采集、图像识别及坐标运算。
13、在本发明的一种优选方式中,还包括有图像数据采集与处理模块,所述图像数据采集与处理模块利用安装在机械臂上的相机,在机械臂每次移动后拍摄标定物件的图像,并对拍摄的图像进行处理。
14、在本发明的一种优选方式中,所述对拍摄的图像进行处理,具体包括:对每次拍摄的标定物件的图像进行存储,然后利用图像处理算法获取标记符号的像素坐标并记录。
15、在本发明的一种优选方式中,还包括通过所述光学系统获取待识别目标的点云数据,根据所述变换矩阵将所述点云数据中的每一个点坐标转换成所述机械臂坐标系下的点坐标。
16、在本发明的一种优选方式中,所述根据所述变换矩阵将所述点云数据中的每一个点坐标转换成所述机械臂坐标系下的点坐标,包括:根据所述变换矩阵通过以下将目标的点云数据中的每一个点坐标转换成所述机械臂坐标系下的点坐标:
17、b=m·a
18、其中,m为变换矩阵,a为点云数据中每一个点的齐次坐标,b为机械臂坐标系下每一个点的齐次坐标。
19、在本发明的一种优选方式中,所述机器臂包括摄像机、激光器,焊枪以及与所述机械臂的坐标关系预先确定的标定器,所述标定器与上设有至少三个标定件,所述抓握器和所述扫描器设置在所述机械臂的末端。
20、在本发明的一种优选方式中,还包括:
21、坐标系设置模块,用于设置扫描器坐标系和机械臂末端机械臂坐标系;
22、中心坐标获取模块,获取所述标定件在所述机械臂坐标系下的中心坐标,所述扫描器扫描获取所述标定件在所述扫描器坐标系下的中心坐标;
23、重心平移向量计算模块,用于分别计算所述标定件在所述机械臂坐标系下的坐标和所述标定件在所述扫描器坐标系下的中心坐标的重心平移向量;
24、变换矩阵计算模块,用于将所述重心平移向量按照奇异值分解法计算得到所述扫描器坐标系和所述机械臂坐标系之间的变换矩阵。
25、在本发明的一种优选方式中,所述机械臂包括:
26、执行机构;
27、运动控制卡,用于根据所述收获目标的位置信息进行轨迹规划,并下发运动指令;
28、关节驱动器,用于根据所述运动指令,带动所述执行机构实现所述收获目标的抓取和分离动作;
29、所述机器人移动平台包括:
30、行走机构;
31、电机驱动器,用于驱动所述行走机构;
32、处理器,用于分析所述图像信息,获取并下发导航参数;
33、运动控制器,用于根据所述导航参数,控制所述电机驱动器驱动所述执行机构进行运动。
34、在本发明的一种优选方式中,还包括以下步骤:
35、a.控制机械臂按照预定多组坐标依次进行移动;
36、b.在机械臂每次移动到相应一组预定坐标后,拍摄标定物件图像并处理;
37、c.获取像素坐标系和机器人坐标系之间的转换关系。
38、本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!