一种气动柔性驱动器控制方法及相关设备
本说明书涉及控制科学与工程,更具体地说,本申请涉及一种气动柔性驱动器控制方法及相关设备。
背景技术:
1、气动柔性驱动器存在重量轻、输出力-重比大、具有天然顺应性、安全性高等优点,目前已被广泛应用于穿戴机器人、手术机器人、软体抓手等领域。但由于气动系统以及弹性体带来的迟滞效应,使得其高精度轨迹跟踪控制仍然面临诸多挑战。
技术实现思路
1、在
技术实现要素:
部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本申请的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、第一方面,本申请提出一种气动柔性驱动器控制方法,上述方法包括:
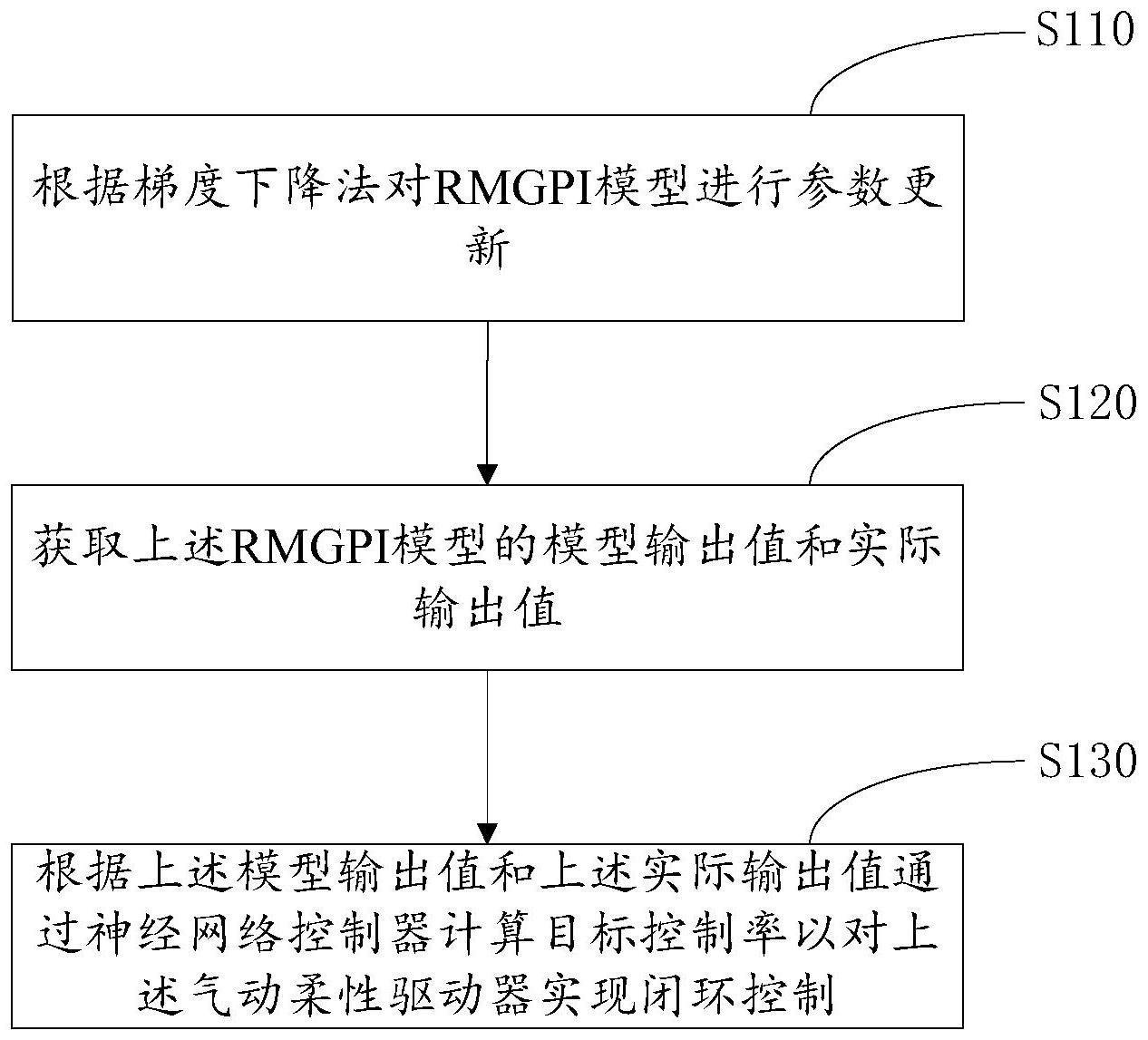
3、根据梯度下降法对rmgpi模型进行参数更新,其中,上述rmgpi模型是基于输入量的变化率且与频率相关的迟滞模型;
4、获取上述rmgpi模型的模型输出值和实际输出值;
5、根据上述模型输出值和上述实际输出值通过神经网络控制器计算目标控制率以对上述气动柔性驱动器实现闭环控制。
6、可选的,上述rmgpi模型的包络函数包括左包络函数和右包络函数,
7、上述根据梯度下降法对rmgpi模型进行参数更新,包括:
8、根据上述rmgpi的模型的算子当前输出值、上述rmgpi的模型的算子上一周期输出值、上述rmgpi模型的模型输出值、代价函数、输出误差值和链式法则获取上述代价函数分别对包络函数的每个算子中的模型参数的梯度,以对rmgpi模型进行参数更新。
9、可选的,上述方法还包括:
10、将平方损失函数确定为代价函数;
11、将上述rmgpi模型的输出值和上述实际输出值的差值作为输出误差值。
12、可选的,上述根据上述模型输出值和上述实际输出值通过神经网络控制器计算目标控制率以对上述气动柔性驱动器实现闭环控制,包括:
13、根据上述模型输出值和上述实际输出值获取第一输入信息和第二输入信息,其中,上述第一输入信息为上述模型输出值和上述实际输出值的输出差值,上述第二输入信息为上述输出差值对应的一阶微分;
14、将上述第一输入信息和上述第二输入信息输入至上述神经网络控制器计算目标控制率以对上述气动柔性驱动器实现闭环控制。
15、可选的,上述神经网络控制器包括输入层、模糊化层、隐层和输出层,上述输入层的输入参数包括输入输出误差值和输出误差值对应的一阶微分,上述模糊化层选用高斯隶属度函数,上述隐层包括两层全连接的隐层,上述输出层通过线性相加方式确定输出,上述模糊化层和上述隐层采用relu函数为激活函数。
16、可选的,上述神经网络控制器为fnn控制器,
17、上述方法还包括:
18、基于梯度下降法对上述fnn控制器的参数进行更新。
19、可选的,上述基于梯度下降法对上述fnn控制器的参数进行更新,包括:
20、选取平方损失函数作为上述fnn控制器的代价函数;
21、根据链式法则分别获取代价函数与输出层、模糊化层和隐层的偏微分关系
22、根据上述rmgpi模型的输入方程的离散形式的微分方程和上述偏微分关系分别获取输出层、模糊化层和隐层的梯度以对参数进行更新。
23、第二方面,本申请还提出一种气动柔性驱动器控制装置,包括:
24、更新单元,用于根据梯度下降法对rmgpi模型进行参数更新,其中,上述rmgpi模型是基于输入量的变化率且与频率相关的迟滞模型;
25、获取单元,用于获取上述rmgpi模型的模型输出值和实际输出值;
26、控制单元,用于根据上述模型输出值和上述实际输出值通过神经网络控制器计算目标控制率以对上述气动柔性驱动器实现闭环控制。
27、第三方面,一种电子设备,包括:存储器、处理器以及存储在上述存储器中并可在上述处理器上运行的计算机程序,上述处理器用于执行存储器中存储的计算机程序时实现如上述的第一方面任一项的气动柔性驱动器控制方法的步骤。
28、第四方面,本申请还提出一种计算机可读存储介质,其上存储有计算机程序,上述计算机程序被处理器执行时实现第一方面上述任一项的气动柔性驱动器控制方法。
29、综上,本申请实施例的气动柔性驱动器控制方法包括:根据梯度下降法对rmgpi模型进行参数更新,其中,上述rmgpi模型是基于输入量的变化率且与频率相关的迟滞模型;获取上述rmgpi模型的模型输出值和实际输出值;根据上述模型输出值和上述实际输出值通过神经网络控制器计算目标控制率以对上述气动柔性驱动器实现闭环控制。本申请实施例提供的柔性驱动器控制方法基于一种改进的prandtl-ishlinskii(pi)模型的在线迟滞模型(rmgpi模型),结合梯度下降与模型预测控制方法,实现了柔性驱动器的端到端模型预测控制。所提出的在线迟滞模型可适用于任意频率相关的对称或非对称迟滞系统,且可基于梯度下降策略对模型在线更新,保证模型精度。同时,该方法避免了传统pi模型用于解决控制问题时,需要求逆的繁琐步骤,减少了因模型不确定和建模不精确带来的影响。
30、本申请提出的气动柔性驱动器控制方法,本申请的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本申请的研究和实践而为本领域的技术人员所理解。
技术特征:
1.一种气动柔性驱动器的控制方法,其特征在于,包括:
2.根据权利要求1所述的控制方法,其特征在于,所述rmgpi模型的包络函数包括左包络函数和右包络函数,
3.根据权利要求2所述的控制方法,其特征在于,还包括:
4.根据权利要求1所述的方法,其特征在于,所述根据所述模型输出值和所述实际输出值通过神经网络控制器计算目标控制率以对所述气动柔性驱动器实现闭环控制,包括:
5.根据权利要求3所述的控制方法,其特征在于,所述神经网络控制器包括输入层、模糊化层、隐层和输出层,所述输入层的输入参数包括输入输出误差值和输出误差值对应的一阶微分,所述模糊化层选用高斯隶属度函数,所述隐层包括两层全连接的隐层,所述输出层通过线性相加方式确定输出,所述模糊化层和所述隐层采用relu函数为激活函数。
6.根据权利要求5所述的方法,其特征在于,所述神经网络控制器为fnn控制器,
7.根据权利要求6所述的方法,其特征在于,所述基于梯度下降法对所述fnn控制器的参数进行更新,包括:
8.一种气动柔性驱动器控制装置,其特征在于,包括:
9.一种电子设备,包括:存储器和处理器,其特征在于,所述处理器用于执行存储器中存储的计算机程序时实现如权利要求1-7中任一项所述的气动柔性驱动器控制方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1-7中任一项所述的气动柔性驱动器控制方法。
技术总结
本申请公开了一种气动柔性驱动器控制方法及相关设备。该方法包括:根据梯度下降法对RMGPI模型进行参数更新,其中,上述RMGPI模型是基于输入量的变化率且与频率相关的迟滞模型;获取上述RMGPI模型的模型输出值和实际输出值;根据上述模型输出值和上述实际输出值通过神经网络控制器计算目标控制率以对上述气动柔性驱动器实现闭环控制。
技术研发人员:黄剑,茹宏格,杨钰琦,欧伟轩,阳星月
受保护的技术使用者:华中科技大学鄂州工业技术研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!