一种机器人移动协作系统的混合调度方法与流程
本发明涉及机器人混合调度控制,特别涉及一种机器人移动协作系统的混合调度方法。
背景技术:
1、目前,对机器人进行调度是为了实现多个机器人在同一个工作环境中进行移动调度,在现有技术中,通常是通过结合几何判断从而实现对不同机器人类型移动调度;
2、然而,传统的机器人调度没有结合具体的工作任务以及环境场所进行分析,从而没有专门制定与工作任务相匹配的调度策略,进而在调度过程会存在预料之外的事故,从而影响工作任务的进度,也不利于机器人之间的移动协作,同时,没有对应的指令进行控制,使得混合调度机器人的移动协作智能效果低下,从而使得机器人移动协作的效率以及准确性低下;
3、为了克服上述技术问题存在的弊端,本发明提供了一种机器人移动协作系统的混合调度方法。
技术实现思路
1、本发明提供一种机器人移动协作系统的混合调度方法,用以通过确定目标工作场所以及工作任务,从而有效确定对机器人进行混合调度的环境,因地制宜,进而有效确定工作任务对应的执行步骤,从而有利于确定对机器人的子调度策略,进而实现对机器人进行混合调度的综合调度策略,提高了对机器人进行混合调度的效率,通过确定机器人调度指令与路径协调指令,从而有利于实现对机器人进行混合调度控制的智能性与协调性。
2、一种机器人移动协作系统的混合调度方法,包括:
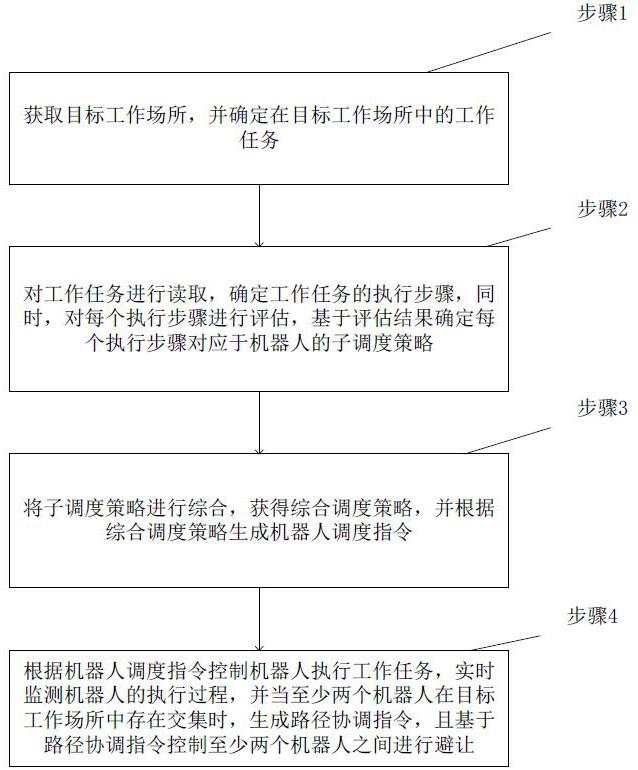
3、步骤1:获取目标工作场所,并确定在目标工作场所中的工作任务;
4、步骤2:对工作任务进行读取,确定工作任务的执行步骤,同时,对每个执行步骤进行评估,基于评估结果确定每个执行步骤对应于机器人的子调度策略;
5、步骤3:将子调度策略进行综合,获得综合调度策略,并根据综合调度策略生成机器人调度指令;
6、步骤4:根据机器人调度指令控制机器人执行工作任务,实时监测机器人的执行过程,并当至少两个机器人在目标工作场所中存在交集时,生成路径协调指令,且基于路径协调指令控制至少两个机器人之间进行避让。
7、优选的,一种机器人移动协作系统的混合调度方法,步骤1中,获取目标工作场所,并确定在目标工作场所中的工作任务,包括:
8、对目标工作场所进行扫描,获取目标工作场所的场所环境数据,并基于目标工作场所对应的场所环境数据确定目标工作场所的场所分布特征;
9、读取工作任务,确定工作任务中的位置关键词,并根据工作任务中的位置关键词在目标工作场所中进行定位,确定执行工作任务时在目标工作场所中的位置映射点;
10、根据位置映射点以及目标场所的场所分布特征构建在目标工作场所的场所地图。
11、优选的,一种机器人移动协作系统的混合调度方法,确定执行工作任务时在目标工作场所中的位置映射点,包括:
12、对工作任务中的位置关键词进行读取,确定工作任务中位置关键词对应的第一目标位置点;
13、对目标工作场所的场所环境数据进行读取,确定目标工作场所中可移动区域的第二位置点集以及目标工作场所中非移动区域的第三位置点集;
14、将第一目标位置点输入至第三位置点集中进行匹配,确定与第一位置点相对应的第三目标位置点,同时,基于第三位置点确定在第二位置点集中相关的第二目标位置点;
15、其中,第二目标位置点与第三目标位置点即为第一目标位置点的位置映射点。
16、优选的,一种机器人移动协作系统的混合调度方法,步骤2中,对工作任务进行读取,确定工作任务的执行步骤,包括:
17、读取工作任务,确定工作任务的执行目标,同时,确定工作任务的目标关键词,并基于工作任务的目标关键词对工作任务进行分割,生成多个第一子工作任务;
18、根据分割顺序,确定每个第一子工作任务在执行目标中对应的子执行目标,同时,分别计算相邻两个第一子工作任务执行相似度;
19、获取执行相似度阈值,并将相邻两个第一子工作任务的执行相似度与执行相似度阈值进行比较,同时,对相邻两个第一子工作任务在执行目标中对应的子执行目标进行匹配;
20、当相邻两个第一子工作任务的执行相似度等于或大于执行相似度阈值,且相邻两个第一子工作任务在执行目标中对应的子执行目标一致时,将相邻两个第一子工作任务进行合并,获得第二子工作任务;
21、否则,则相邻两个第一子工作任务不进行合并;
22、基于第一子工作任务与第二子工作任务并根据目标关键词生成工作任务对应的执行步骤。
23、优选的,一种机器人移动协作系统的混合调度方法,步骤2中,对每个执行步骤进行评估,基于评估结果确定每个执行步骤对应于机器人的子最优调度策略,包括:
24、对每条执行步骤进行读取,确定每条执行步骤对应的执行目标,同时,在预设机器人管理库中调取每个机器人的目标参数,并根据每个机器人的目标参数分别评估当前机器人完成当前执行步骤对应执行目标的可执行度;
25、获取可执行度阈值,并将当前机器人完成当前执行步骤对应执行目标的可执行度与可执行度阈值进行比较,判断当前机器人是否可以完成当前执行步骤;
26、当当前机器人完成当前执行步骤对应执行目标的可执行度小于或等于可执行度阈值时,则判定当前机器人可以完成当前执行步骤;
27、否则,则判定当前机器人不可以完成当前执行步骤;
28、当当前机器人可以完成当前执行步骤时,获取当前机器人执行当前步骤时的执行动作集,并确定当前目标机器人完成每一个执行动作需要的平均目标时长,同时,根据当前目标机器人完成每一个执行动作需要的平均时长以及当前机器人执行当前步骤时的执行动作集确定当前目标机器人完成当前执行步骤的总时间长度;
29、获取完成当前执行步骤的最佳时间长度,并将当前目标机器人完成当前执行步骤的总时间长度与最佳时间长度进行比较;
30、当当前目标机器人完成当前执行步骤的总时间长度在最佳时间长度内时,则基于当前机器人执行对应的当前步骤;
31、否则,获取总时间长度与最佳时间长度的目标比值,并将目标比值基于取整函数获得与当前执行步骤相一致的目标机器人的目标个数;
32、基于执行当前步骤所对应的目标机器人、目标机器人的执行动作以及目标机器人的目标个数确定子调度策略。
33、优选的,一种机器人移动协作系统的混合调度方法,步骤3中,将子调度策略进行综合,获得综合调度策略,并根据综合调度策略生成机器人调度指令,包括:
34、获取每个执行步骤的执行顺序,并根据每个执行步骤的执行顺序将每个子调度策略进行综合,获得综合调度策略;
35、根据综合调度策略,确定每个目标机器人的调度顺序以及每个目标机器人的执行动作,同时,根据每个目标机器人的调度顺序以及每个目标机器人的执行动作生成机器人调度指令。
36、优选的,一种机器人移动协作系统的混合调度方法,步骤3中,根据综合调度策略生成机器人调度指令后,还包括:
37、在预设模拟平台中基于目标工作场所的场所环境数据构建虚拟工作场所;
38、基于预设虚拟平台读取工作任务,确定任务执行标准;
39、基于机器人调度指令控制虚拟机器人在虚拟工作场所中进行模拟操作,并实时记录模拟操作数据;
40、基于模拟操作数据确定对虚拟机器人进行混合调度的目标执行结果,将目标执行结果与任务执行标准进行匹配,判断综合调度策略是否合格;
41、当目标执行结果与任务执行标准匹配时,则判定综合调度策略合格;
42、否则,则判定综合调度策略不合格。
43、优选的,一种机器人移动协作系统的混合调度方法,还包括:
44、当综合调度策略不合格时,基于工作任务的执行步骤确定理想执行数据,并将理想执行数据与模拟操作数据进行匹配,确定模拟操作数据中的相异数据;
45、对相异数据进行读取,确定相异数据对应的目标虚拟机器人,同时,监控目标虚拟机器人的执行动作数据;
46、根据理想执行数据对目标虚拟机器人的执行动作数据进行修正,同时,将修正结果在综合调度策略中进行更新;
47、基于更新后的综合调度策略重新生成机器人调度指令。
48、优选的,一种机器人移动协作系统的混合调度方法,实时监测机器人的执行过程,并当至少两个机器人在目标工作场所中存在交集时,生成路径协调指令,且基于路径协调指令控制至少两个机器人之间进行避让,包括:
49、在执行工作任务过程中基于机器人生成位置定位信号,并对位置定位信号进行实时监测,获取每个机器人的监测位置数据;
50、将每个机器人的监测位置数据在预设监控终端中进行绘制,并获得每个机器人的运行轨迹路线;
51、基于每个机器人的运行轨迹路线确定机器人之间的目标距离,当当前至少两个机器人之间的目标距离达到第一距离阈值时,则对当前至少两个机器人之间运行轨迹路线进行标记,并基于标记结果确定当前至少两个机器人之间的运行趋势,且根据当前至少两个机器人之间的运行趋势确定目标距离的变化趋势;
52、当目标距离的变化趋势变大时,则取消对当前至少两个机器人之间运行轨迹路线的标记;
53、当目标距离的变化趋势变小时,确定当前至少两个机器人之间的目标距离是否达到第二距离阈值;
54、当当前至少两个机器人之间的目标距离没有达到第二阈值时,则不生成路径协调指令;
55、当当前至少两个机器人之间的目标距离达到第二距离阈值时,基于预设监控终端调取当前目标工作场所的场所地图,并分别确定当前至少两个机器人的位置信息;
56、基于当前至少两个机器人的位置信息在场所地图中进行标记,同时,基于标记结果在场所地图中选取当前至少一个待避让机器人的最优避让路线;
57、基于最优避让路线生成路径协调指令,并将路径协调指令传输至对应的对应待避让机器人中控制对应待避让机器人进行避让;
58、其中,第二阈值小于第一阈值。
59、优选的,一种机器人移动协作系统的混合调度方法,基于标记结果在场所地图中选取当前至少一个待避让机器人的最优避让路线,包括:
60、读取待避让机器人在场所地图中的起始位置点,同时,确定待避让机器人的终止位置点,并确定起始位置点与终止位置点之间的多个故障物对应的目标位置点;
61、根据起始位置点与终止位置点确定在场所地图中的路径评价函数,并根据路径评价函数锁定最优避让路线。
62、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
63、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!