一种机械夹爪及其激励方法与流程
本申请涉及机械夹爪领域,具体而言,涉及一种机械夹爪及其激励方法。
背景技术:
1、目前机械夹爪在各个领域应用广泛,机械夹爪的小型化、轻量化及多功能化是当前机械夹爪领域的一个重要发展方向,如何实现机械夹爪的小型化、轻量化及多功能化是当下工业界和学术界的一个研究热点。
2、目前,常见的机械夹爪采用电机、液压或气压驱动,其中电机驱动的夹爪多采用集成减速器的伺服电磁电机做动力源,然而,这类电动机械夹爪结构复杂、机构多、体积大、精度低、响应慢且无自锁功能。
3、针对上述问题,目前尚未有有效的技术解决方案。
技术实现思路
1、本申请的目的在于提供一种机械夹爪及其激励方法,旨在解决现有的采用集成减速器的伺服电磁电机做动力源的电动机械夹爪结构复杂、机构多、体积大、精度低、响应慢且无自锁功能的问题。
2、第一方面,本申请提供了一种机械夹爪,包括基座、第一手指和第二手指,第一手指的一端和第二手指的一端均与基座铰接,且基座位于第一手指和第二手指之间,
3、机械夹爪还包括超声电机和螺杆;
4、螺杆与基座转动连接;
5、超声电机包括弹性基体、第一压电片组、第二压电片组和定位夹;
6、弹性基体与螺杆螺纹连接;
7、第一压电片组和第二压电片组设置在弹性基体两端,第一压电片组和第二压电片组均包括四个均匀分布在弹性基体四个侧壁的压电片,第一压电片组和第二压电片组接有交流电信号以产生y向振动和x向振动以使弹性基体形变而驱动螺杆转动;
8、定位夹固定安装在弹性基体上并设置在第一压电片组和第二压电片组之间,第一手指通过第一连杆与定位夹铰接,第二手指通过第二连杆与定位夹铰接。
9、本申请提出的机械夹爪,将超声电机与螺杆螺纹连接,在向超声电机上的第一压电片组和第二压电片组上的压电片输入电信号时,压电片产生逆压电效应致使弹性基体沿一定轨迹发生形变,其与螺杆的接触面上的椭圆轨迹使螺杆转动,从而使与螺杆螺纹连接的弹性基体在螺杆上沿螺杆轴向位移,进而通过第一连杆和第二连杆推动第一手指和第二手指闭合或张开。与现有的采用集成减速器的伺服电磁电机做动力源的电力驱动机械夹爪相比,本申请的机械夹爪只具有上述数个部件,结构简单、机构少且体积小;并且本申请使用激励电路向压电片输入交流电信号以控制机械夹爪的夹紧或松开,精度高且响应快;此外本申请的机械夹爪在停止向压电片输入交流电信号时,基于超声电机与螺杆之间的摩擦力能使机械夹爪保持静止,因此本申请的机械夹爪具有断电自锁功能。
10、可选地,本申请提供的一种机械夹爪,交流电信号包括第一电信号和第二电信号,机械夹爪还包括第一激励电路和第二激励电路;
11、第一激励电路连接第一压电片组和第二压电片组中位于弹性基体上下两侧的压电片,用于输入第一电信号以产生y向振动;
12、第二激励电路连接第一压电片组和第二压电片组中位于弹性基体左右两侧的压电片,用于输入第二电信号以产生x向振动。
13、可选地,本申请提供的一种机械夹爪,第一连杆的两端分别与第一手指和定位夹的一端铰接;
14、第二连杆的两端分别与第二手指和定位夹的另一端铰接。
15、可选地,本申请提供的一种机械夹爪,定位夹包括形状大小相同的上定位块和下定位块;
16、弹性基体具有位于第一压电片组和第二压电片组之间的过渡部,上定位块和下定位块设置在过渡部上,过渡部的上下两侧分别与上定位块的边缘和下定位块的边缘贴合。
17、可选地,本申请提供的一种机械夹爪,上定位块上具有与弹性基体形状相适应的定位槽,上定位块和下定位块通过螺钉固定连接以使定位槽紧扣过渡部以将定位夹固定在弹性基体上。
18、可选地,本申请提供的一种机械夹爪,第一手指和第二手指均包括一体连接的前段、中段和后段;
19、第一手指和第二手指的前段均与基座铰接;
20、第一手指的前段和中段的连接处与第一连杆远离弹性基体的一端铰接;
21、第二手指的前段和中段的连接处与第二连杆远离弹性基体的一端铰接。
22、可选地,本申请提供的一种机械夹爪,第一手指和第二手指的后段具有用于固定安装负载机构的负载安装孔。
23、可选地,本申请提供的一种机械夹爪,螺杆远离基座一端设置有限位块。
24、在该实施方式中,本申请的机械夹爪在螺杆远离基座一端设置限位块,能对在螺杆上进行往复运动的超声电机进行限位,进而限制机械夹爪张开的程度。
25、第二方面,本申请提供了一种机械夹爪的激励方法,机械夹爪的激励方法用于控制如第一方面提出的机械夹爪进行夹持或松开的动作;
26、机械夹爪的激励方法包括以下步骤:
27、s1、获取动作指令信息;
28、s2、根据动作指令信息对超声电机上的压电片施加交流电信号,以使弹性基体形变而驱动螺杆转动而使第一手指和第二手指完成与动作指令信息相对应的动作。
29、本申请提出的一种机械夹爪的激励方法,通过向超声电机上的压电片输入交流电信号使弹性基体产生对应轨迹的形变,从而使弹性基体在形变过程中与螺杆接触并驱动弹性基体在螺杆上沿螺杆轴向位移,从而带动第一手指和第二手指相向或反向摆动以实现夹持或松开,控制方法简单、精度高且响应快。
30、可选地,本申请提供的一种机械夹爪的激励方法,用于产生y向振动的交流电信号与用于产生x向振动的交流电信号的相位差为±π/2。
31、在该实施方式中,本申请的机械夹爪的激励方法设置相位差为±π/2的用于产生y向振动的交流电信号与用于产生x向振动的交流电信号,使弹性基体产生的振动轨迹为正椭圆轨迹,从而驱动螺杆转动以使超声电机在螺杆上进行往复运动。
32、由上可知,本申请提供了一种机械夹爪及其激励方法,其中机械夹爪将超声电机与螺杆螺纹连接,在向超声电机上的第一压电片组和第二压电片组上的压电片输入电信号时,压电片产生逆压电效应致使弹性基体沿一定轨迹发生形变,其与螺杆的接触面上的椭圆轨迹使螺杆转动,从而使与螺杆螺纹连接的弹性基体在螺杆上沿螺杆轴向位移,进而通过第一连杆和第二连杆分别推动第一手指和第二手指闭合或张开。与现有的采用集成减速器的伺服电磁电机做动力源的电力驱动机械夹爪相比,本申请的机械夹爪只具有上述数个部件,结构简单、机构少且体积小;并且本申请使用激励电路向压电片输入交流电信号以控制机械夹爪的夹紧或松开,精度高且响应快;此外本申请的机械夹爪在停止向压电片输入交流电信号时,基于超声电机与螺杆之间的摩擦力能使机械夹爪保持静止,因此本申请的机械夹爪具有断电自锁功能。
技术特征:
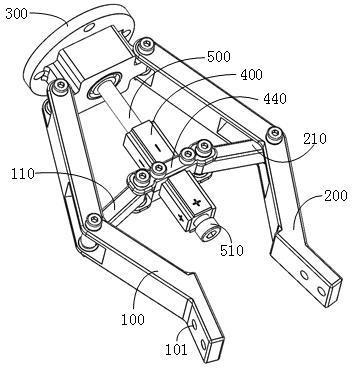
1.一种机械夹爪,包括基座(300)、第一手指(100)和第二手指(200),所述第一手指(100)的一端和所述第二手指(200)的一端均与所述基座(300)铰接,且所述基座(300)位于所述第一手指(100)和所述第二手指(200)之间,其特征在于,
2.根据权利要求1所述的一种机械夹爪,其特征在于,所述交流电信号包括第一电信号和第二电信号,所述机械夹爪还包括第一激励电路(10)和第二激励电路(20);
3.根据权利要求1所述的一种机械夹爪,其特征在于,所述第一连杆(110)的两端分别与所述第一手指(100)和所述定位夹(440)的一端铰接;
4.根据权利要求1所述的一种机械夹爪,其特征在于,所述定位夹(440)包括形状大小相同的上定位块(441)和下定位块(442);
5.根据权利要求4所述的一种机械夹爪,其特征在于,所述上定位块(441)上具有与所述弹性基体(430)形状相适应的定位槽,所述上定位块(441)和所述下定位块(442)通过螺钉固定连接以使定位槽紧扣所述过渡部以将所述定位夹(440)固定在所述弹性基体(430)上。
6.根据权利要求1所述的一种机械夹爪,其特征在于,所述第一手指(100)和所述第二手指(200)均包括一体连接的前段、中段和后段;
7.根据权利要求6所述的一种机械夹爪,其特征在于,所述第一手指(100)和所述第二手指(200)的后段具有用于固定安装负载机构的负载安装孔(101)。
8.根据权利要求1所述的一种机械夹爪,其特征在于,所述螺杆(500)远离所述基座(300)一端设置有限位块(510)。
9.一种机械夹爪的激励方法,其特征在于,所述机械夹爪的激励方法用于控制如权利要求1-8中任一所述的机械夹爪进行夹持或松开的动作;
10.根据权利要求9所述的一种机械夹爪的激励方法,其特征在于,用于产生y向振动的所述交流电信号与用于产生x向振动的所述交流电信号的相位差为±π/2。
技术总结
本申请涉及机械夹爪领域,具体而言,涉及一种机械夹爪及其激励方法,其中机械夹爪包括基座、第一手指和第二手指,机械夹爪还包括超声电机和螺杆;第一压电片组和第二压电片组设置在弹性基体两端,第一压电片组和第二压电片组均包括四个均匀分布在弹性基体四个侧壁的压电片;第一手指通过第一连杆与定位夹铰接,第二手指通过第二连杆与定位夹铰接,本申请的机械夹爪能解决现有的采用集成减速器的伺服电磁电机做动力源的电动机械夹爪结构复杂、机构多、体积大、精度低、响应慢且无自锁功能的问题,能达到结构简单、机构少、体积小、精度高、响应快且有自锁功能的效果。
技术研发人员:刘振,王豪,王济宇,黄秀韦,杨鹏
受保护的技术使用者:季华实验室
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!