一种考虑敏感关节的机器人位姿误差在线补偿方法及设备
本发明属于机器人位姿误差补偿相关,更具体地,涉及一种考虑敏感关节的机器人位姿误差在线补偿方法及设备。
背景技术:
1、机器人在生产制作的过程中无法准确按照理论图纸加工,由于装配误差等的影响导致机器人的绝对定位精度较差,无法应用于机器人加工,开展机器人位姿误差补偿是有效提升机器人绝对定位精度的方法之一。
2、传统的机器人位姿误差补偿主要是离线补偿,通过前期测量机器人的参数误差,对机器人的理论运动学模型进行修改或者将已知的误差计算到关节空间改变理论关节角实现补偿。这种补偿方式仅能将目前已可以解析建模的部分误差进行补偿,无法充分考虑机器人运动过程中的全部误差。另一小部分方法就是通过在线测量反馈测量误差并将误差反算到机器人关节角完成补偿。
3、传统的补偿方法没有充分的分析机器人的误差特性,所有轴同时参与补偿运动,在补偿误差的同时引入新的误差,导致补偿效果不佳。因此不能通过上述传统的方法实现较高精度的机器人位姿误差补偿,需要一种有效的补偿方法解决上述问题。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种考虑敏感关节的机器人位姿误差在线补偿方法及设备,其解决了现有技术中机器人位姿误差补偿精度低,补偿关节不明确的问题。
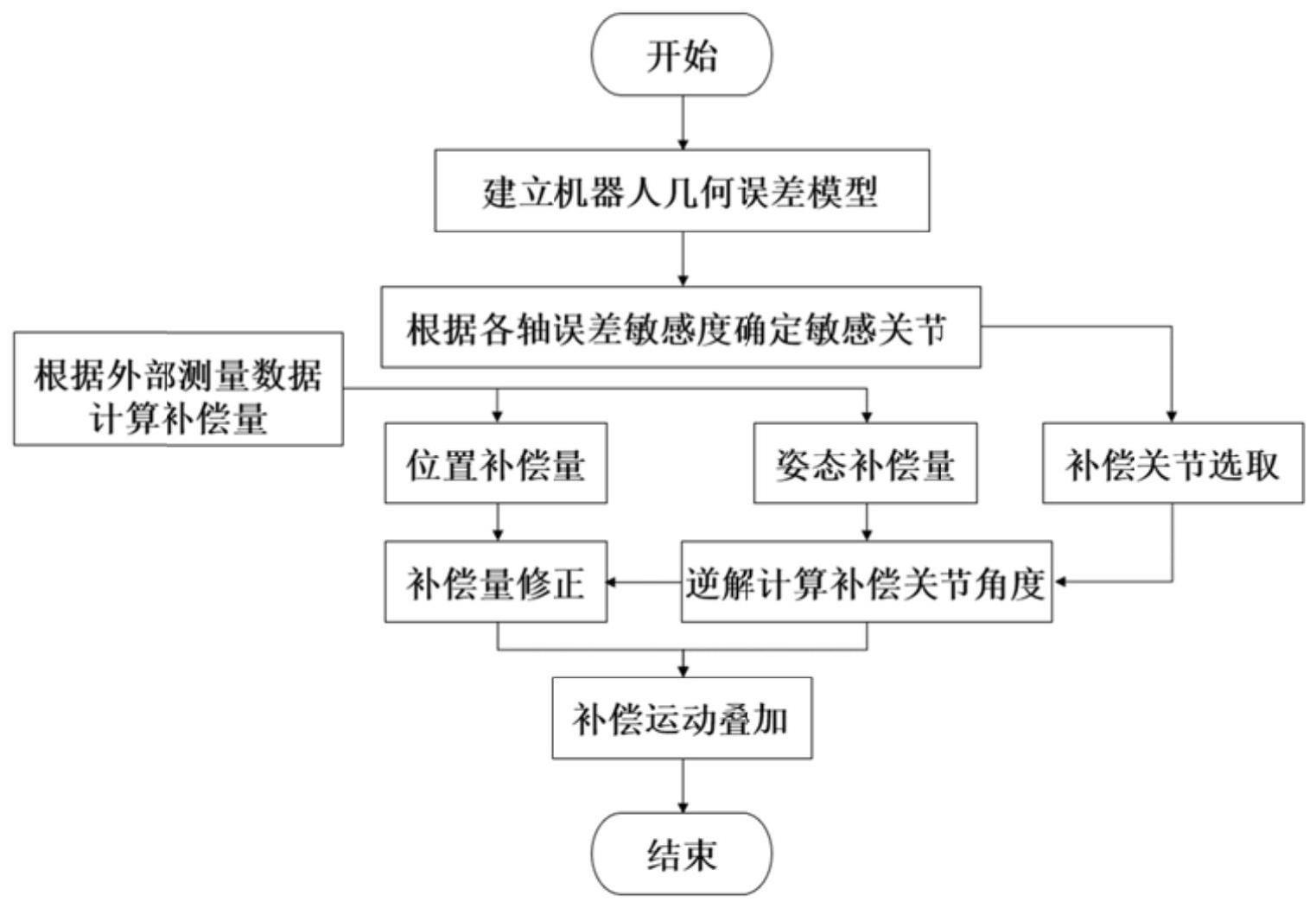
2、为实现上述目的,按照本发明的一个方面,提供了一种考虑敏感关节的机器人位姿误差在线补偿方法,该方法主要包括以下步骤:
3、s1,基于机器人正运动学构建机器人几何误差模型,以将六项误差分量表达为机器人六个关节角的函数;
4、s2,基于所述机器人几何误差模型开展全局敏感度分析,定量计算各关节轴对各项误差的敏感度,选取对于x、y、z项误差敏感度最小的三个关节即最不敏感关节作为姿态误差补偿关节;
5、s3,在线测量机器人末端位姿,将获取的机器人末端位姿向量与机器人关节角数据按照时间戳进行匹配,利用匹配后的两组数据计算位置补偿量与姿态补偿量;
6、s4,将得到的姿态补偿量叠加下一点位位姿数据以构成新点位,并在非位姿补偿关节角度保持不动的前提下逆解姿态误差补偿关节,获取姿态误差补偿关节角;
7、s5,将姿态误差补偿关节角通过正运动学计算得到这组关节角下的理论位置,并将得到的理论位置与原关节角对应计算得到的原位置作差以得到位置偏差值,利用位置偏差值对得到的位置补偿量进行修正,进而结合位置补偿误差与姿态补偿误差实现安装在机器人末端与安装在三轴微动平台上的工件的相对运动,完成误差补偿与运动叠加。
8、进一步地,s1包括以下子步骤:
9、s1.1测量机器人实际dh参数,并计算机器人的连杆参数误差;
10、s1.2构建以机器人关节角的正弦函数为自变量的机器人几何误差模型。
11、进一步地,机器人几何误差模型的表达式为:
12、e=ferror(sθ,δ)
13、其中sθ为机器人关节角的正弦值所组成的向量,表示为sθ=[sin(θ1) sin(θ2)…sin(θ6)]t,θ1 θ2…θ6为机器人的一组关节角;ferror(·)表示机器人几何误差函数,e为机器人末端的位置误差和姿态误差组成的机器人几何误差向量;δ为机器人连杆参数误差向量组成的矩阵。
14、进一步地,根据各轴误差敏感度确定姿态误差补偿关节的步骤如下:
15、s2.1构建误差敏感总效应指数矩阵,对所构建的机器人几何误差模型进行敏感度分析;
16、s2.2对sθ向量中的元素在-1到1的范围进行蒙特卡洛采样,并计算s2.1所述的误差敏感总效应指数矩阵m;
17、s2.3确定敏感关节与姿态误差补偿关节。
18、进一步地,所述误差敏感总效应指数矩阵表示为:
19、
20、其中e为根据构建的机器人几何误差模型在采样点处计算得到的机器人几何误差;m为机器人几何误差的六项分量对关节角变化的敏感总效应指数向量组成的矩阵。
21、进一步地,s3中,记机器人关节角为sn、外部测量数据为lm:
22、
23、其中,si表示第i个点位机器人测量的关节角,为机器人第i个位姿的关节角,lj表示第j个点位外部测量设备测量到的机器人末端位姿,(xj yj zj)为第j个点位测量位姿在机器人基坐标系下的末端位置坐标,(rxj ryj rzj)为第j个点位测量位姿在机器人基坐标系下的表示姿态的欧拉角。
24、进一步地,将机器人关节角数据转换到笛卡尔空间:
25、pn={p1,p2,...,pn}(pi=fforward(si)=[xi yi zi rxi ryi rzi]t)
26、其中,fforward(.)表示机器人正运动学函数;(xi yi zi)为第i个点位机器人测量位姿在机器人基坐标系下的末端位置坐标,(rxi ryi rzi)为第i个机器人测量位姿在机器人基坐标系下的表示姿态的欧拉角。
27、s3.3计算误差补偿量
28、由s3.2获得机器人测量数据与外部测量数据计算补偿量,误差补偿量即为两者之差,具体可以表示为:
29、
30、其中,为i点的位置补偿量进行修改后在三轴微动平台上进行补偿,为i点的姿态补偿量在机器人端进行补偿。
31、进一步地,逆解补偿关节运动角度的步骤如下:
32、s4.1利用理论dh参数,按照先分别沿x轴、z轴平移再分别沿x轴、z轴旋转的顺序构建相邻连杆的运动学模型,相邻连杆的运动学模型表示为:
33、
34、式中,为第i-1关节到第i个关节的齐次变换矩阵,其中ai为第i个关节的连杆长度参数,di为第i个关节的偏距参数,αi为第i个关节的扭角参数,θi第i个关节的转角参数;
35、s4.2记第i个点的末端理论位姿为则进行姿态补偿后的期望位姿为:
36、
37、其中fetot(·)表示欧拉角转换为对应的齐次变换矩阵的函数,为所计算出的第i-1个点位即补偿点位前一个已测量点位的姿态补偿量。
38、利用s4.1所构建的正运动学构建等式得到逆解关节角的方程组,所述等式可以表示为:
39、
40、
41、完成方程组的构建,在已知不参加补偿的三个轴的角度(即采用理论角度)可以求解出s2确定参加姿态补偿的三个关节的角度,完成姿态补偿关节角度的逆解计算。
42、s5.1计算并修正位置补偿量,所述的位置补偿量修正计算方法具体可以表示为:
43、记由s4所得第i个点姿态补偿后的关节角为理论关节角为则修正后的位置补偿量
44、可表示为:
45、
46、其中为s3所计算出的第i个点位的位置补偿量,为工件坐标系到机器人基坐标系的旋转矩阵,fposition(·)表示通过机器人正运动学计算机器人末端位置的函数。
47、本发明还提供了一种考虑敏感关节的机器人位姿误差在线补偿系统,所述系统存储器及处理器,所述存储器储存有计算机程序,所述处理器执行所述计算机程序时执行如上所述的考虑敏感关节的机器人位姿误差在线补偿方法。
48、本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有机器可执行指令,所述机器可执行指令在被处理器调用和执行时,所述机器可执行指令促使所述处理器实现如上所述的考虑敏感关节的机器人位姿误差在线补偿方法。
49、总体而言,通过本发明所构思的以上技术方案与现有技术相比,本发明提供的考虑敏感关节的机器人位姿误差在线补偿方法及设备主要具有以下有益效果:
50、1.本发明先对应机器人进行误差建模,建立误差与关节角的函数,并利用该模型进行误差敏感度分析,通过误差敏感度分析定量的判断了各关节运动对末端位姿误差在各个方向分量的敏感度,确定了位置误差的敏感关节,选取出了适合进行姿态误差补偿的关节,解决了现有方法中多关节同时参与补偿不明确各关节补偿效果的问题,避免了因误差敏感关节参与补偿运动,在轴间串扰的影响下导致补偿精度的下降,同时也减少了运动的关节数,减少了误差传递过程中对误差的叠加与放大,采用考虑敏感关节的补偿策略可以进一步提高机器人位姿误差的补偿精度。
51、2.本发明采用分平台补偿的补偿方式,通过机器人不敏感关节的运动完成姿态补偿在机器人平台的补偿,微动平台完成位置补偿;位置补偿量通过三轴微动平台带动工件与机器人发生相对移动来完成补偿,并在补偿过程中考虑了由于进行姿态补偿所导致的位置偏移,进行了对理论计算的位置补偿量的修正并获得了更为准确的补偿数据,通过这一补偿思路实现了机器人末端位姿在工件坐标系内的六维位姿补偿,可有效的提高机器人铣削过程中的绝对位姿精度。
52、3.本发明所提供的考虑敏感关节的分平台机器人位姿误差在线补偿设备有效的将机器人与加工平台形成一个加工系统,通过高性能工控机实现同步运动;通过这一设备结合机器人位姿误差在线补偿方法将补偿量在这一加工系统中实现了合理的分配,降低了补偿难度,提高了补偿精度。
- 还没有人留言评论。精彩留言会获得点赞!