机器人的制作方法
本申请涉及智能机器,特别是涉及机器人。
背景技术:
1、随着人工智能技术的飞速发展和不断的突破,智能机器人正逐渐成为人们生活中的得力助手和陪伴伙伴。从家庭到工作场所,从医疗到交通,智能机器人的应用领域越来越广泛。比如,寓教于乐的智能机器狗,不仅能够播放语音,还可以与用户进行智能交互。在机器人的各种应用场景中,机器人需要面对各种复杂的环境,如城市、野外等。机器人的电子线路布局和连接方式对其性能和稳定性有着重要的影响。相关技术中,机器人密集的线缆不能得到良好的固定,活动的线缆会与外界环境中的障碍物干涉,造成线缆的磨损、移位,从而影响机器人的稳定性和安全性。
技术实现思路
1、基于此,有必要针对上述问题,提供一种稳定、安全的机器人。
2、一方面,提供一种机器人,包括:
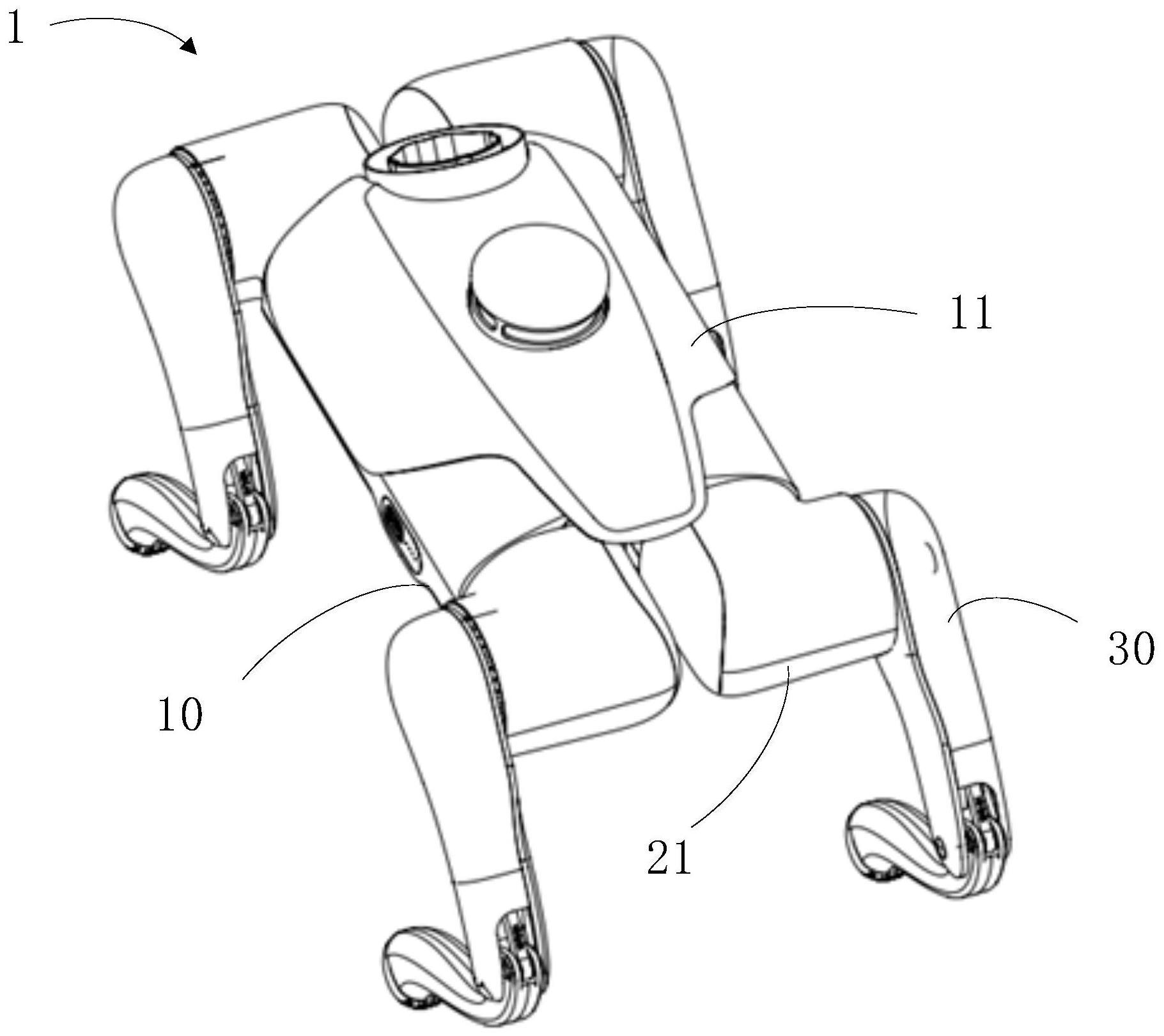
3、躯干;
4、行走腿,与所述躯干活动连接;
5、驱动组件,至少包括能够驱动所述行走腿绕第一轴线转动的第一驱动件;所述第一驱动件设有第一线缆,所述第一线缆包括依次设置的绕线段和出线段,所述绕线段绕设在所述躯干和所述行走腿之间,所述出线段自所述绕线段朝向所述躯干延伸;以及
6、固定组件,连接于所述驱动组件,所述固定组件包括固定部,所述固定部被配置为固定所述出线段。
7、在其中一个实施例中,所述固定组件还包括导向部,所述导向部被配置为容纳所述出线段,所述导向部和/或所述固定部的延伸方向与所述出线段的延伸方向相匹配。
8、在其中一个实施例中,所述驱动组件还包括第二驱动件,所述第二驱动件能够驱动所述行走腿绕第二轴线的转动,所述第二驱动件与所述第一驱动件传动连接;所述绕线段绕设在所述第一驱动件和所述第二驱动件之间。
9、在其中一个实施例中,所述出线段包括第一出线段和第二出线段,所述固定组件还包括间隔设置的第一压线板和第二压线板,所述固定部包括设于所述第一压线板的第一固定部和设于所述第二压线板的第二固定部,所述第一固定部和所述第二固定部分别被配置为固定所述第一出线段和所述第二出线段。
10、在其中一个实施例中,所述第二驱动件设有第二线缆,所述第二线缆包括第三出线段,所述第二固定部的延伸方向与所述第三出线段的延伸方向相匹配。
11、在其中一个实施例中,所述驱动组件还包括连接所述第一驱动件和所述第二驱动件的第一支架,所述第一支架包括设于所述第一驱动件和所述第二驱动件之间的绕线部,所述绕线段绕设在所述绕线部。
12、在其中一个实施例中,所述驱动组件还包括第三驱动件,所述第三驱动件能够驱动所述行走腿绕第三轴线的转动,所述第三驱动件与所述第一驱动件传动连接;所述第三驱动件设于所述躯干内。
13、在其中一个实施例中,所述固定组件还包括设于所述第三驱动件的第三压线板,所述固定部包括设于第三压线板设的第三固定部,所述第三固定部被配置为固定所述出线段。
14、在其中一个实施例中,所述躯干包括壳体和连接所述壳体的底板,所述第一驱动件设于底板远离所述壳体的一侧,所述底板上设有引线口,所述第一线缆穿设于所述引线口。
15、在其中一个实施例中,所述绕线段的绕设圈数至少为两圈。
16、在其中一个实施例中,所述出线段沿第一方向延伸,所述第一方向与绕线段的径向平面具有夹角。
17、在其中一个实施例中,还包括关节壳,所述关节壳设于所述躯干和所述行走腿之间,所述关节壳被配置为包覆于所述驱动组件的至少部分和所述第一线缆。
18、一方面,提供一种固定组件,连接于上述的驱动组件,所述固定组件包括固定部,所述固定部被配置为固定所述出线段。
19、在其中一个实施例中,所述固定组件还包括导向部,所述导向部被配置为容纳所述出线段,所述导向部和/或所述固定部的延伸方向与所述出线段的延伸方向相匹配。
20、在其中一个实施例中,所述固定组件还包括锁定部和紧固件,所述紧固件将所述锁定部与所述驱动组件固定连接。
21、一方面,提供一种机器人的走线方法,包括步骤:
22、将第一驱动件的第一线缆在所述躯干和所述行走腿之间绕设预设圈数;
23、将所述第一线缆的出线段朝向所述躯干延伸;
24、固定所述出线段于所述驱动组件。
25、上述的机器人,通过将第一线缆绕设在躯干和行走腿之间,起到收纳和配合第一驱动件运动的作用;同时,配合设置固定组件将第一线缆与驱动件连接,实现第一线缆的固定和收纳,避免使用过程中第一线缆被外部环境或内部结构干涉从而造成破损,从改善了机器人电连接的可靠性和安全性。
技术特征:
1.一种机器人,其特征在于,包括:
2.根据权利要求1所述的机器人,其特征在于,所述固定组件还包括导向部,所述导向部被配置为容纳所述出线段,所述导向部和/或所述固定部的延伸方向与所述出线段的延伸方向相匹配。
3.根据权利要求1所述的机器人,其特征在于,所述驱动组件还包括第二驱动件,所述第二驱动件能够驱动所述行走腿绕第二轴线的转动,所述第二驱动件与所述第一驱动件传动连接;所述绕线段绕设在所述第一驱动件和所述第二驱动件之间。
4.根据权利要求3所述的机器人,其特征在于,所述出线段包括第一出线段和第二出线段,所述固定组件还包括间隔设置的第一压线板和第二压线板,所述固定部包括设于所述第一压线板的第一固定部和设于所述第二压线板的第二固定部,所述第一固定部和所述第二固定部分别被配置为固定所述第一出线段和所述第二出线段。
5.根据权利要求4所述的机器人,其特征在于,所述第二驱动件设有第二线缆,所述第二线缆包括第三出线段,所述第二固定部的延伸方向与所述第三出线段的延伸方向相匹配。
6.根据权利要求3所述的机器人,其特征在于,所述驱动组件还包括连接所述第一驱动件和所述第二驱动件的第一支架,所述第一支架包括设于所述第一驱动件和所述第二驱动件之间的绕线部,所述绕线段绕设在所述绕线部。
7.根据权利要求1所述的机器人,其特征在于,所述驱动组件还包括第三驱动件,所述第三驱动件能够驱动所述行走腿绕第三轴线的转动,所述第三驱动件与所述第一驱动件传动连接;所述第三驱动件设于所述躯干内;所述固定组件还包括设于所述第三驱动件的第三压线板,所述固定部包括设于第三压线板设的第三固定部,所述第三固定部被配置为固定所述出线段。
8.根据权利要求1所述的机器人,其特征在于,所述躯干包括壳体和连接所述壳体的底板,所述第一驱动件设于底板远离所述壳体的一侧,所述底板上设有引线口,所述第一线缆穿设于所述引线口。
9.根据权利要求1所述的机器人,其特征在于,所述出线段沿第一方向延伸,所述第一方向与绕线段的径向平面具有夹角。
10.根据权利要求1所述的机器人,其特征在于,还包括关节壳,所述关节壳设于所述躯干和所述行走腿之间,所述关节壳被配置为包覆于所述驱动组件的至少部分和所述第一线缆。
技术总结
本申请涉及一种机器人,包括:躯干;行走腿,与躯干活动连接;驱动组件,至少包括能够驱动行走腿绕第一轴线转动的第一驱动件;第一驱动件设有第一线缆,所述第一线缆包括依次设置的绕线段和出线段,所述绕线段绕设在所述躯干和所述行走腿之间,所述出线段自所述绕线段朝向所述躯干延伸;以及固定组件,连接于所述驱动组件,所述固定组件包括固定部,所述固定部被配置为固定所述出线段。本申请将第一线缆绕设在躯干和行走腿之间,起到收纳和配合第一驱动件运动的作用;同时,配合设置固定组件将第一线缆与驱动件连接,实现第一线缆的固定和收纳,避免使用过程中第一线缆被外部环境或内部结构干涉从而造成破损,从改善了机器狗电连接的可靠性和安全性。
技术研发人员:请求不公布姓名
受保护的技术使用者:南京蔚蓝智能科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!