一种用于统计作业的机器人的制作方法
本发明涉及核算统计,特别涉及一种用于统计作业的机器人。
背景技术:
1、统计作业在生产制造活动中尤为重要;在车间生产线收尾和库存盘点;需要对生产的产品或者产品装配所需的零部件进行库存清点,从而保证对生产物料数量具有明确的了解,便于后期的管理和调用,但现有的仓库货物多通过人工进行清点,由于仓库货物过多,导致清点时费时费力,且通过人工进行的方式极有可能出现偏差,失误率较大;
2、在物料盘点统计作业中,对与球形物料盘点最为困难;球形物料不能像有固定规格形状的堆物料摞码放,一般多采用用围栏进行散乱堆放;因此只能靠人工逐个放到托盘中进行逐个清点,盘点效率低下;
3、针对球形物料,现有多采用光电流水线对单排通过的球物料进行计数;在实际使用中,由于灰尘或者重复检测等其他因素会导致光电感应失效;进一步导致统计数量不准确,缺少闭环数据反馈。
4、基于上述问题,因此急需要一款能帮助工人盘点的机器人辅助人工日常盘点。
技术实现思路
1、解决的技术问题:
2、针对现有技术的不足,本发明提供了一种用于统计作业的机器人,设计计数手臂具有两个,通过驱动装置驱动计数手臂在两个工位旋转,在控制装置的控制下,实现计数手臂的下降和对球形物料的吸取与释放,期间不需要为人参与,就能实现对物料的自动统计计数和有序码放;与人工统计作业相比大大提高统计效率;解决了背景技术中提及的技术问题。
3、技术方案:
4、为实现以上目的,本发明通过以下技术方案予以实现:
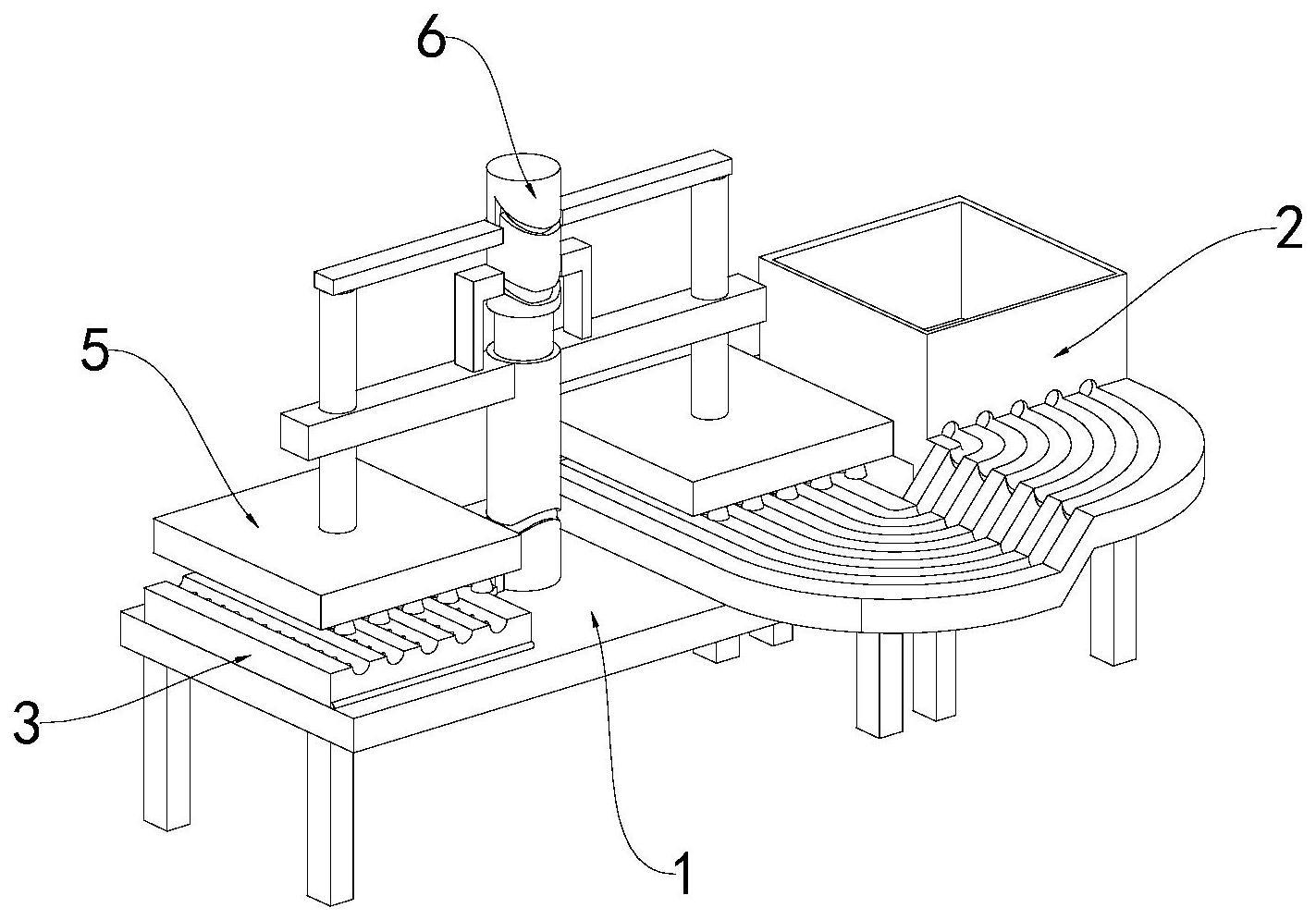
5、一种用于统计作业的机器人,包括底座、整流装置、驱动装置和计数手臂;所述底座顶部右端设置有整流装置;所述底座顶部中间设置有计数手臂,计数手臂具有两个,计数手臂的底部设置有驱动装置,计数手臂中间设置有控制装置;通过驱动装置驱动计数手臂旋转,在控制装置的控制下,实现计数手臂自动统计计数;所述计数手臂包括旋转筒,旋转筒顶部左右两侧固定连接有固定臂;固定臂远离旋转筒的一端竖直滑动设置有升降杆;两个升降杆的下端固定连接有吸附盘;两个升降杆的上端相向固定连接有控制杆,所述固定臂内部具有控制吸附盘吸附的主气管;固定臂靠近旋转筒的一端设置有控制阀,控制阀用于控制主气管关闭和打开。
6、在一种可能的实现方式中,所述整流装置包括震动箱,震动箱出料口处设置有弧形板,弧形板下料处设置有存放板;所述弧形板和存放板顶部开设有多组导流槽一。
7、在一种可能的实现方式中,所述控制装置包括固定杆,所述固定杆贯穿旋转筒内部与底座固定连接;所述固定杆上方开设有控制滑槽一和控制滑槽二;所述控制滑槽二位于控制滑槽一的上方;所述控制阀上端具有滑块一,所述滑块一与控制滑槽一相匹配;所述控制杆的靠近控制装置的一端具有滑块二,所述滑块二与控制滑槽二相匹配。
8、在一种可能的实现方式中,所述控制滑槽一为波浪形,包括波谷段和波峰段一;所述波谷段和波峰段一,波谷段与波峰段一首尾连接;所述波峰段一位于固定杆左侧;波谷段位于与固定杆右侧;通过波谷段和波峰段一对控制阀的约束,使控制阀相对于固定臂上下滑动。
9、在一种可能的实现方式中,所述控制滑槽二为波浪形,包括滑升段和竖直段;所述滑升段和竖直段均具有两段;滑升段和竖直段相互间隔设置且首尾连接;所述竖直段位于固定杆左右两侧;滑升段位于固定杆前后两侧;通过滑升段和竖直段对控制杆的约束,使升降杆相对于固定臂上下滑动。
10、在一种可能的实现方式中,所述吸附盘底部具有多个吸附装置,吸附装置内部具有计数装置。
11、在一种可能的实现方式中,所述吸附盘底部间隔开设有凹槽,凹槽内部设置有安装板,安装板上滑动设置有吸附装置。
12、在一种可能的实现方式中,其特征在于:所述底座顶部左侧设置有复核台,复核台顶部开设有导流槽二,导流槽二与导流槽一间距对应;所述流槽一底部间隔设置有限位槽,限位槽内部设置有重力感应器;所述复核台右侧固定设置有凸块;复核台前侧通过铰链与底座转动连接。
13、在一种可能的实现方式中,所述旋转筒下方外侧开设有控制滑槽三,控制滑槽三内部滑动连接有放行架,放行架为z形,所述放行架的上方靠近控制滑槽三的一端通过滑块三与控制滑槽三滑动连接;放行架下方一端位于凸块的下方;所述控制滑槽三包括平滑段和波峰段二;所述平滑段和波峰段二均具有两段;平滑段和波峰段二相互间隔设置且首尾连接;所述平滑段位于固定杆左右两侧;波峰段二位于固定杆前后两侧;通过平滑段和波峰段二对放行架的的滑块三约束。
14、在一种可能的实现方式中,所述吸附装置包括喇叭口,喇叭口顶部设置有真空发生器,真空发生器上方设置有气管,气管与主气管连接;所述位与喇叭口内侧设置有负压孔;所述真空发生器顶部设置有计数装置;所述计数装置包括外壳,外壳底部滑动设置有压杆,压杆下端贯穿真空发生器,且压杆下端具有的挤压板与真空发生器之间设置有弹簧;压杆顶部具有弹性板,弹性板背对气管的一面设置有感应体,弹性板顶部与外壳滑动贴合的两个面具有凸起;外壳内壁开设有与凸起相匹配的单向滑槽;所述外壳远离气管的内壁设置有计数光电;计数光电具有感应头,感应头与感应体相互感应;所述单向滑槽包括逐深滑槽和逐浅滑槽;所述逐深滑槽为鱼钩形包括竖直段和弯曲段,所述竖直段与弯曲段连接,且位于弯曲段逐步变深;所述逐浅滑槽位倾斜状,分别将逐深滑槽的竖直段和弯曲段连接;且靠近逐深滑槽的竖直段的一端深度小于逐深滑槽的竖直段。
15、有益效果:
16、1.本发明的计数手臂具有两个,通过驱动装置驱动计数手臂在两个工位旋转,在控制装置的控制下,实现计数手臂的下降和对球形物料的吸取与释放,期间不需要为人参与,就能实现对物料的自动统计计数和有序码放;与人工统计作业相比大大提高统计效率;
17、2.在统计作业中,本发明通过同一个吸附盘吸附时计数光电采集的数据与物料下落时重力感应器采集的数据进行对比;如果数据不对应,则说明真空发生器有损坏或者压力不足,导致物料没有被吸附;这样处理器会发生警报,提醒工作人员根据处理器报警数据进行排查,维护或者更好损坏的部件;进一步提高数据准确性的同时,另一面便于日常检修。
技术特征:
1.一种用于统计作业的机器人,包括:底座(1)、整流装置(2)、驱动装置(4)和计数手臂(5);其特征在于,所述底座(1)顶部右端设置有整流装置(2);所述底座(1)顶部中间设置有计数手臂(5),计数手臂(5)具有两个,计数手臂(5)的底部设置有驱动装置(4),计数手臂(5)中间设置有控制装置(6);通过驱动装置(4)驱动计数手臂(5)旋转,在控制装置(6)的控制下,实现计数手臂(5)自动统计计数;所述计数手臂(5)包括旋转筒(51),旋转筒(51)顶部左右两侧固定连接有固定臂(52);固定臂(52)远离旋转筒(51)的一端竖直滑动设置有升降杆(53);两个升降杆(53)的下端固定连接有吸附盘(55);两个升降杆(53)的上端相向固定连接有控制杆(54),所述固定臂(52)内部具有控制吸附盘(55)吸附的主气管;固定臂(52)靠近旋转筒(51)的一端设置有控制阀(56),控制阀(56)用于控制主气管关闭和打开。
2.如权利要求1所述的一种用于统计作业的机器人,其特征在于:所述整流装置(2)包括震动箱(21),震动箱(21)出料口处设置有弧形板(22),弧形板(22)下料处设置有存放板(23);所述弧形板(22)和存放板(23)顶部开设有多组导流槽一(24)。
3.如权利要求2所述的一种用于统计作业的机器人,其特征在于:所述控制装置(6)包括固定杆(61),所述固定杆(61)贯穿旋转筒(51)内部与底座(1)固定连接;所述固定杆(61)上方开设有控制滑槽一(62)和控制滑槽二(63);所述控制滑槽二(63)位于控制滑槽一(62)的上方;所述控制阀(56)上端具有滑块一,所述滑块一与控制滑槽一(62)相匹配;所述控制杆(54)的靠近控制装置(6)的一端具有滑块二,所述滑块二与控制滑槽二(63)相匹配。
4.如权利要求3所述的一种用于统计作业的机器人,其特征在于:所述控制滑槽一(62)为波浪形,包括波谷段(621)和波峰段一(622);所述波谷段(621)和波峰段一(622),波谷段(621)与波峰段一(622)首尾连接;所述波峰段一(622)位于固定杆(61)左侧;波谷段(621)位于与固定杆(61)右侧;通过波谷段(621)和波峰段一(622)对控制阀(56)的约束,使控制阀(56)相对于固定臂(52)上下滑动。
5.如权利要求3所述的一种用于统计作业的机器人,其特征在于:所述控制滑槽二(63)为波浪形,包括滑升段(631)和竖直段(632);所述滑升段(631)和竖直段(632)均具有两段;滑升段(631)和竖直段(632)相互间隔设置且首尾连接;所述竖直段(632)位于固定杆(61)左右两侧;滑升段(631)位于固定杆(61)前后两侧;通过滑升段(631)和竖直段(632)对控制杆(54)的约束,使升降杆(53)相对于固定臂(52)上下滑动。
6.如权利要求1所述的一种用于统计作业的机器人,其特征在于:所述吸附盘(55)底部具有多个吸附装置(57),吸附装置(57)内部具有计数装置(58)。
7.如权利要求6所述的一种用于统计作业的机器人,其特征在于:所述吸附盘(55)底部间隔开设有凹槽(551),凹槽(551)内部设置有安装板(552),安装板(552)上滑动设置有吸附装置(57)。
8.如权利要求1-7任意一项所述的一种用于统计作业的机器人,其特征在于:所述底座(1)顶部左侧设置有复核台(3),复核台(3)顶部开设有导流槽二(31),导流槽二(31)与导流槽一(24)间距对应;所述流槽一(24)底部间隔设置有限位槽(34),限位槽(34)内部设置有重力感应器;所述复核台(3)右侧固定设置有凸块(32);复核台(3)前侧通过铰链(33)与底座(1)转动连接。
9.如权利要求8所述的一种用于统计作业的机器人,其特征在于:所述旋转筒(51)下方外侧开设有控制滑槽三(511),控制滑槽三(511)内部滑动连接有放行架(7),放行架(7)为z形,所述放行架(7)的上方靠近控制滑槽三(511)的一端通过滑块三与控制滑槽三(511)滑动连接;放行架(7)下方一端位于凸块(32)的下方;所述控制滑槽三(511)包括平滑段(5111)和波峰段二(5112);所述平滑段(5111)和波峰段二(5112)均具有两段;平滑段(5111)和波峰段二(5112)相互间隔设置且首尾连接;所述平滑段(5111)位于固定杆(61)左右两侧;波峰段二(5112)位于固定杆(61)前后两侧;通过平滑段(5111)和波峰段二(5112)对放行架(7)的的滑块三约束。
10.如权利要求9所述的一种用于统计作业的机器人,其特征在于:所述吸附装置(57)包括喇叭口(571),喇叭口(571)顶部设置有真空发生器(572),真空发生器(572)上方设置有气管(573),气管(573)与主气管连接;所述位与喇叭口(571)内侧设置有负压孔(5721);所述真空发生器(572)顶部设置有计数装置(58);所述计数装置(58)包括外壳(581),外壳(581)底部滑动设置有压杆(582),压杆(582)下端贯穿真空发生器(572),且压杆(582)下端具有的挤压板与真空发生器(572)之间设置有弹簧;压杆(582)顶部具有弹性板(5821),弹性板(5821)背对气管(573)的一面设置有感应体(5822),弹性板(5821)顶部与外壳(581)滑动贴合的两个面具有凸起(5823);外壳(581)内壁开设有与凸起(5823)相匹配的单向滑槽(584);所述外壳(581)远离气管(573)的内壁设置有计数光电(583);计数光电(583)具有感应头(5831),感应头(5831)与感应体(5822)相互感应;所述单向滑槽(584)包括逐深滑槽(5841)和逐浅滑槽(5842);所述逐深滑槽(5841)为鱼钩形包括竖直段和弯曲段,所述竖直段与弯曲段连接,且位于弯曲段逐步变深;所述逐浅滑槽(5842)位倾斜状,分别将逐深滑槽(5841)的竖直段和弯曲段连接;
技术总结
本发明涉及核算统计技术领域,特别涉及一种用于统计作业的机器人,包括底座、整流装置、驱动装置和计数手臂;所述底座顶部右端设置有整流装置;所述底座顶部中间设置有计数手臂,计数手臂具有两个,计数手臂的底部设置有驱动装置,本发明的计数手臂具有两个,通过驱动装置驱动计数手臂在两个工位旋转,在控制装置的控制下,实现计数手臂的下降和对球形物料的吸取与释放,期间不需要为人参与,就能实现对物料的自动统计计数和有序码放;与人工统计作业相比大大提高统计效率。
技术研发人员:王华,张坤
受保护的技术使用者:济宁获客商务有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!