用于机器人应用的自动仓检测的制作方法
背景技术:
1、在未知或动态环境中的诸如机器人抓取和操纵的自主操作存在各种技术挑战。动态环境中的自主操作可应用于大规模定制(例如,高混合、低体积制造)、智能工厂中的按需灵活制造过程、智能商店中的仓库自主化、智能物流中来自分配中心的自主递送等。为了执行自主操作,诸如抓取和操纵,在一些情况下,机器人可以使用机器学习,特别是深度神经网络或强化学习来学习技能。
2、具体地,例如,机器人可以在不同情况下与不同对象交互。一些对象对于给定的机器人可能是未知的。仓拾取是机器人能够使用ai执行的示例操作。仓拾取是指机器人从容器或仓中抓取能够定义随机或任意姿态的对象。机器人能够移动或运输对象,并将它们放置在不同的位置用于包装或进一步处理。然而,在此认识到,当前的机器人拾取方法缺乏效率和能力。特别地,由于这样做的各种技术挑战,当前的方法经常不能正确地或有效地估计仓的姿态,这可能影响给定机器人的抓取计算和整体性能。
技术实现思路
1、本发明的实施方式通过提供用于确定仓的姿态的方法、系统和设备来解决和克服本文所述的一个或多个缺点或技术问题。这种仓姿态估计可以在给定机器人的运行时间期间执行,使得可以由于仓姿态估计而增强抓取。
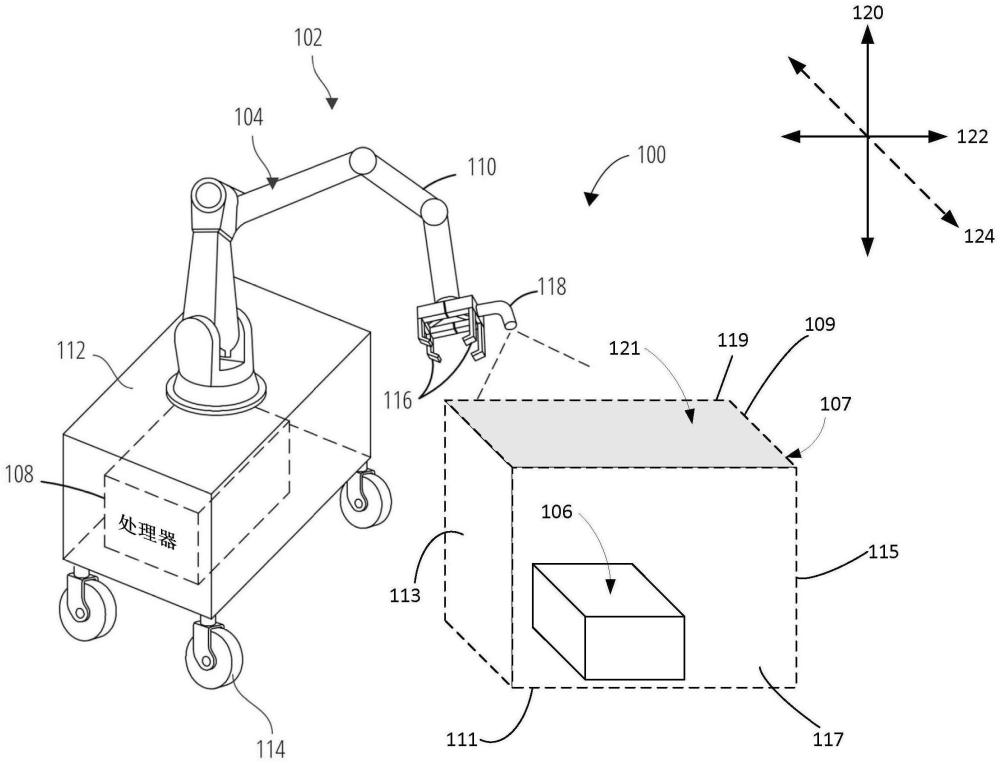
2、在一个示例方面中,一种自主系统包括被配置为在主动工业运行时间中操作以便定义运行时间的机器人。该机器人包括末端执行器,该末端执行器被配置为在工作空间内抓取多个对象。该自主系统可以包括深度相机,该深度相机被配置为捕获该工作空间的深度图像。自主系统还包括处理器和存储指令的存储器,指令在由处理器执行时使自主系统执行各种操作。例如,系统可以检测工作空间内的仓,其中,仓能够包含多个对象中的一个或多个。基于深度图像,系统可以确定仓的姿态。该姿态可以定义仓在工作空间内的方位。
3、在一个示例中,仓沿着贯轴方向定义底端和与底端相对的顶端,其中,底端与顶端相比沿着贯轴方向远离深度相机定位。顶端可以定义开口和围绕该开口的仓的侧面,使得深度相机进一步被配置为从沿着贯轴方向的视角捕获仓的深度图像。基于该深度图像,该系统可以生成该仓的分割掩模,该分割掩模定义表示该仓在顶端处的侧面的像素。该系统可以沿着第一方向和基本上垂直于第一方向的第二方向扫描分割掩模,以便识别分割掩模的最外边缘上的多个点。此外,系统可以将多个模型拟合到由多个点定义的边界,以便确定仓的姿态。
技术特征:
1.一种自主系统,被配置为在主动工业环境中操作以便定义运行时间,所述自主系统包括:
2.根据权利要求1所述的自主系统,其中,所述仓沿着贯轴方向定义底端和与所述底端相对的顶端,所述底端与所述顶端相比沿着所述贯轴方向远离所述深度相机定位,所述顶端定义开口和所述仓的围绕所述开口的侧面,使得所述深度相机进一步被配置为从沿着所述贯轴方向的视角捕获所述仓的深度图像。
3.根据权利要求2所述的自主系统,所述存储器进一步存储指令,所述指令在由所述一个或多个处理器执行时,使得所述自主系统在所述运行时间期间:
4.根据权利要求3所述的自主系统,所述存储器进一步存储指令,所述指令在由所述一个或多个处理器执行时,使得所述自主系统在所述运行时间期间:
5.根据权利要求4所述的自主系统,所述存储器进一步存储指令,所述指令在由所述一个或多个处理器执行时,使得所述自主系统在所述运行时间期间:
6.一种由自主系统执行的方法,所述自主系统包括在主动工业环境中操作以便定义运行时间的机器人,所述方法包括:
7.根据权利要求6所述的方法,其中,所述仓沿着贯轴方向定义底端和与所述底端相对的顶端,所述底端与所述顶端相比沿着所述贯轴方向远离深度相机定位,所述顶端定义开口和所述仓的围绕所述开口的侧面,使得所述深度相机进一步被配置为从沿着所述贯轴方向的视角捕获所述仓的深度图像。
8.根据权利要求7所述的方法,所述方法还包括:
9.根据权利要求8所述的方法,所述方法还包括:
10.根据权利要求9所述的方法,所述方法还包括:
技术总结
本申请涉及一种用于机器人应用的自动仓检测。在此认识到当前的机器人拾取方法缺乏效率和能力。特别地,由于这样做的各种技术挑战,当前的方法经常不能正确地或有效地估计仓的姿态,这可能影响给定机器人的抓取计算和整体性能。可以基于深度图像来确定或估计仓的姿态。这种仓姿态估计可以在给定机器人的运行时间期间执行,使得可以由于仓姿态估计而增强抓取。
技术研发人员:爱德华多·莫拉·西里洛·罗查,胡斯努·梅利赫·埃尔多安,欧根·索洛乔,伊内斯·乌加尔德·迪亚斯,亚什·沙普尔卡尔,田楠,保罗·安德烈亚斯·巴特斯,克里斯托弗·许特
受保护的技术使用者:西门子股份公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!