手术机器人、控制系统、控制方法以及存储介质与流程
本发明涉及医疗,尤其涉及一种手术机器人、控制系统、控制方法以及存储介质。
背景技术:
1、目前,由机器人辅助的微创外科手术逐步应用到实际的临床手术中,这些机器人通常有医生控制台以及多个机械臂。在手术过程中,根据分工不同,在不同的机械臂上安装不同的手术器械,如手术刀、手术剪或内窥镜等。通常通过手术机器人控制系统控制手术器械进行相应的操作。
2、现有的控制系统通常由远端控制台、台车和信息传输模块组成,仅远端控制台设置有急停装置(例如脚踏板),医生在远端控制台观察到需要停止机械臂运动时,则采取急停措施,但位于手术台附近的其它工作人员无法根据手术进程,对机器人采取急停措施,导致存在诸多不变。
技术实现思路
1、为解决上述的技术问题,本发明提出一种便于操控的手术机器人的控制系统、控制方法、存储介质以及手术机器人。
2、第一方面,本发明提供一种手术机器人的控制系统,该手术机器人包括多个机械臂台车,该控制系统包括:
3、远端控制台,用于接收远端需求产生第一交互控制命令;
4、多个近端信息输入模块,各近端信息输入模块分别设于各机械臂台车上,近端信息输入模块用于接收近端需求产生第二交互控制命令;
5、其中,远端控制台上设有第一急停信号输入装置,第一交互控制命令包括由第一急停信号输入装置输入的第一急停信号,各近端信息输入模块上均设有第二急停信号输入装置,第二交互控制命令包括由第二急停信号输入装置输入的第二急停信号,第一急停信号或第二急停信号被配置为能够使所述机器人进入急停状态。
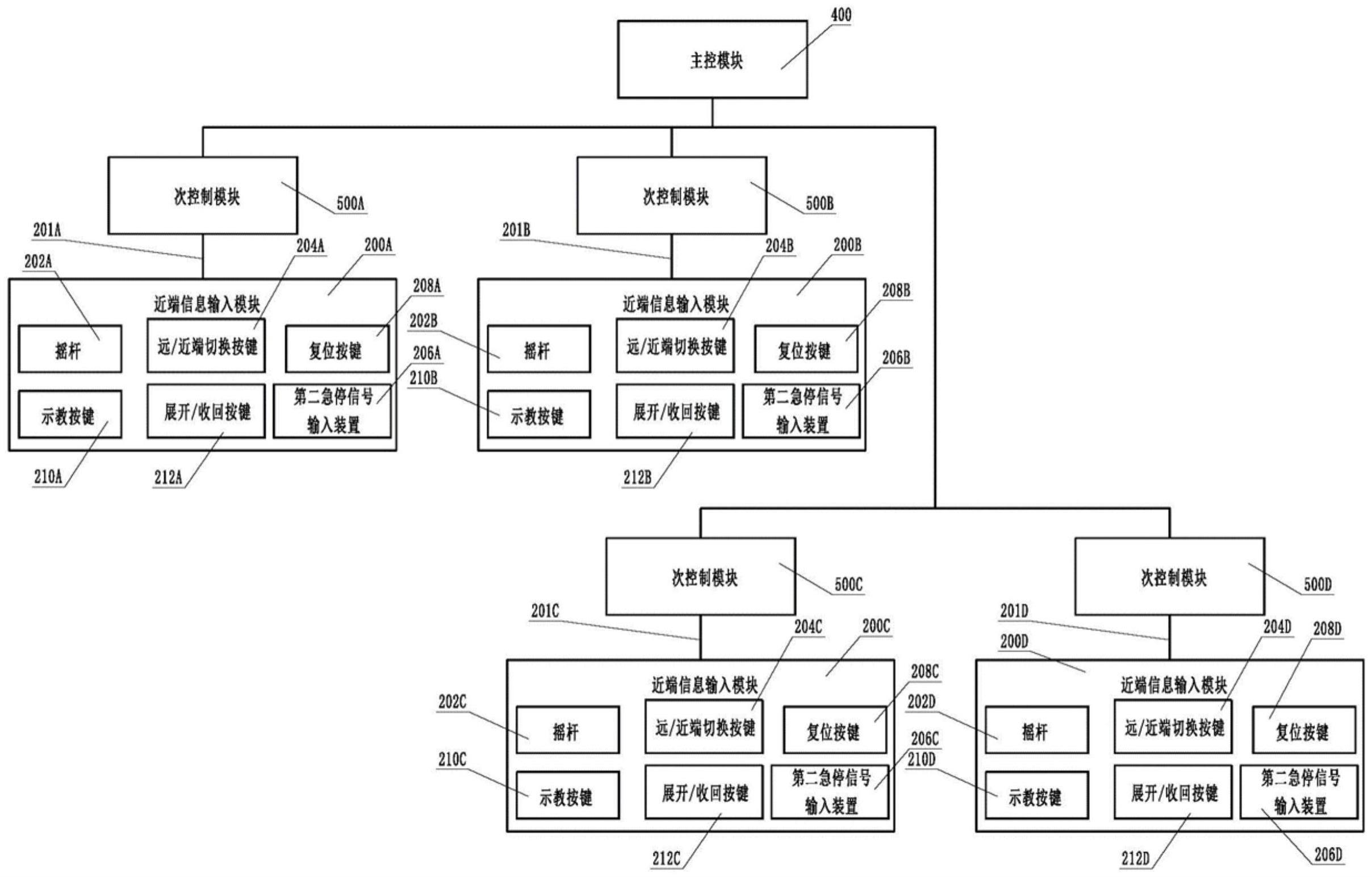
6、进一步地,各机械臂台车设置有至少一个机械臂,控制系统还包括:
7、主控模块,用于根据第一交互控制命令和/或第二交互控制命令产生运动控制命令;
8、多个次控制模块,分别用于控制各机械臂末端执行运动控制命令;
9、其中,近端信息输入模块与次控制模块通信连接,主控模块与远端控制台通信连接,主控模块与次控制模块通信连接。
10、可选地,近端信息输入模块包括控制各机械臂末端朝多个方向移动的摇杆。
11、可选地,近端信息输入模块还包括远/近端切换按键和复位按键。
12、可选地,近端信息输入模块还包括示教按键。
13、可选地,近端信息输入模块还包括展开/收回按键。
14、进一步地,手术机器人的控制系统还包括状态提示模块,状态提示模块与主控模块通信连接,状态提示模块用于根据主控模块发送的状态提示信息进行状态提示。
15、具体地,状态提示模块通过光线颜色和/或光线展示方式进行状态提示,以使不同的光线颜色和/或不同的光线展示方式代表不同的工作状态。
16、更具体地,当近端信息输入模块控制机械臂运动时,状态提示模块被配置为采用第一种颜色光线常亮的方式进行状态提示;当由远端控制台控制机械臂运动时,状态提示模块被配置为采用第二种颜色光线常亮的方式进行状态提示;当进入急停状态时,状态提示模块被配置为采用第三种颜色光线常亮的方式进行状态提示。
17、第二方面,本发明提供一种手术机器人,包括上述的控制系统。
18、第三方面,本发明提供一种手术机器人的控制方法,包括:
19、接收远端控制台产生的第一交互控制命令和/或近端信息输入模块产生的第二交互控制命令;
20、根据第一交互控制命令和/或第二交互控制命令产生运动控制命令;
21、控制相应的机械臂末端执行运动控制命令;
22、其中,第一交互控制命令包括由远端控制台输入的第一急停信号,第二交互控制命令包括由近端信息输入模块输入的第二急停信号。
23、进一步地,第二交互控制命令还包括控制机械臂末端朝多个方向移动的摇杆信号。
24、第四方面,本发明提供一种可读存储介质,其存储有计算机程序,计算机程序在处理器上运行时,执行上述的手术机器人的控制方法。
25、本发明的特点及优点包括:
26、采用本发明的手术机器人的控制系统,在手术过程中,操作任一急停信号输入装置,均可实现急停功能,当遇到紧急情况,需要对机械臂进行急停操控时,位于手术台附近的医生或者医生助理也可以采取急停措施,不仅方便操作,而且可以降低手术风险。并且,通过不同的光线颜色和/或不同的光线展示方式进行状态提示,便于医生快速识别机器人的工作状态。
技术特征:
1.一种手术机器人的控制系统,所述手术机器人包括多个机械臂台车,其特征在于,所述控制系统包括:
2.如权利要求1所述的手术机器人的控制系统,各机械臂台车设置有至少一个机械臂,其特征在于,所述控制系统还包括:
3.如权利要求2所述的手术机器人的控制系统,其特征在于,所述近端信息输入模块包括控制所述各机械臂末端朝多个方向移动的摇杆。
4.如权利要求1至3中任一项所述的手术机器人的控制系统,其特征在于,还包括状态提示模块,所述状态提示模块与所述主控模块通信连接,所述状态提示模块用于根据所述主控模块发送的状态提示信息进行状态提示。
5.如权利要求4所述的手术机器人的控制系统,其特征在于,所述状态提示模块通过光线颜色和/或光线展示方式进行状态提示,以使不同的光线颜色和/或不同的光线展示方式代表不同的工作状态。
6.如权利要求5所述的手术机器人的控制系统,其特征在于,
7.一种手术机器人,其特征在于,包括权利要求1至6中任一项所述的控制系统。
8.一种手术机器人的控制方法,其特征在于,包括:
9.如权利要求8所述的手术机器人的控制方法,其特征在于,
10.一种可读存储介质,其存储有计算机程序,其特征在于,所述计算机程序在处理器上运行时,执行权利要求8或9所述的手术机器人的控制方法。
技术总结
本发明提供一种便于操控的手术机器人的控制系统、控制方法、存储介质以及手术机器人。手术机器人包括多个机械臂台车,该控制系统包括远端控制台,用于接收远端需求产生第一交互控制命令;多个近端信息输入模块,用于接收近端需求产生第二交互控制命令,各机械臂台车均设有近端信息输入模块;其中,远端控制台上设有第一急停信号输入装置,第一交互控制命令包括由第一急停信号输入装置输入的第一急停信号,各近端信息输入模块上均设有第二急停信号输入装置,第二交互控制命令包括由第二急停信号输入装置输入的第二急停信号,第一急停信号或第二急停信号被配置为能够使所述机器人进入急停状态。不仅方便操作,而且可以降低手术风险。
技术研发人员:张俊平,袁明浩,李耀
受保护的技术使用者:成都博恩思医学机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!