一种绳驱式手腕动作机构的制作方法
本发明属于仿生手腕,特别涉及一种绳驱式手腕动作机构。
背景技术:
1、仿生手结构是指动力驱动完成模仿生物形态、结构和动作的仿生机械,它具有自适应抓取功能,能够适应多种物体的抓取,在不同的场合下使用达到减少复杂传感与实时控制的需求,提高抓取的稳定性和精确性,可以被广泛应用在工业、农业与服务业机器人中或者作为假手给残疾人使用。
2、申请号为cn201922237905.1的专利公布了一种欠驱动仿生手腕装置,包括手腕盘座、假肢手盘座及转向支架,转向支架包括呈交叉设置的第一支撑杆组和第二支撑杆组,第一支撑杆组和第二支撑杆组中分别包含至少一根支撑杆,第一支撑杆组中的支撑杆与第二支撑杆组中的支撑杆分别位于平行设置的不同竖直面内;第一支撑组中的支撑杆具有相同的倾斜角度,第二支撑组中的支撑杆具有相同的倾斜角度,各支撑杆的两端分别与手腕盘座的上端面及假肢手盘座的下端面呈旋转铰接;第一支撑杆组和第二支撑杆组上分别设有贯穿手腕盘座的牵引绳,用于拉动支撑杆旋转。本实用新型可以真实模拟人的手腕运动,实现大角度翻转运动,方便与假肢手连接,更加灵活。
3、但是,真实的手腕并不能实现自身中心为转轴自转,上述手腕装置不具有仿生性。并且,上述手腕装置无法实现手腕上下摆动和左右摆动,无法模拟真实的手腕动作。
技术实现思路
1、为了解决现有技术存在的上述问题,本发明的目的在于提供一种可模拟人体手腕上下摆动和左右摆动的绳驱式手腕动作机构。
2、本发明所采用的技术方案为:
3、一种绳驱式手腕动作机构,包括小臂结构、十字轴和手腕转动机构,小臂结构与十字轴转动连接,手腕转动机构分别与十字轴的两侧转动连接,小臂结构与十字轴之间的转轴、十字轴与手腕转动机构之间的转轴垂直;所述小臂结构上安装有两个旋转动力装置,旋转动力装置的输出端的外缘连接有主绳,主绳的另一端与手腕转动机构的相应侧连接,主绳与手腕转动机构的连接点与手腕转动机构的转轴错开;所述旋转动力装置的输出端的外缘还连接有副绳,手腕转动机构上转动连接有平衡连接件,副绳的另一端与平衡连接件连接;所述副绳上连接有张紧弹簧。
4、本发明的两组主绳、副绳和张紧弹簧之间配合,可驱动手腕转动机构上下摆动、左右摆动或做二者的复合运动。在副绳的作用下,主绳能始终保证拉紧状态,保证十字轴和手腕转动机构在确定位置平衡。本发明的手腕动作机构能模拟人体手腕的上下转动、左右转动或二者的复合运动,其仿生性较高。
5、作为本发明的优选方案,两根主绳在手腕转动机构上的连接点分设于手腕转动机构与十字轴的转轴的两侧。两侧的旋转动力装置通过主绳驱动手腕转动机构转动时,副绳起到平衡作用。两侧的旋转动力装置转动速度相同且方向相同时,十字轴不发生左右旋转,手腕转动机构仅上下摆动。若两侧旋转动力装置的转动速度相同且方向相反时,手腕转动机构不发生上下摆动,十字轴仅左右旋转,若两侧旋转动力装置转动速度不同且方向不定时手腕转动机构与十字轴发生复合运动。
6、作为本发明的优选方案,所述平衡连接件包括转动连接于手腕转动机构上的连接杆,连接杆上转动连接有水平板,两根副绳分别连接于水平板的两端。
7、作为本发明的优选方案,所述手腕转动机构包括手腕连接件,手腕连接件与十字轴转动连接,平衡连接件与手腕连接件转动连接,手腕连接件上转动连接有手掌连接件,手掌连接件与手腕连接件之间设置有用于驱动手掌连接件相对于手腕连接件转动的转动放大组件。手腕连接件相对于十字轴上下转动时,手掌连接件随手腕连接件转动。转动放大组件能驱动手掌连接件相对于手腕连接件进一步转动,则手掌连接件的转动角度得到放大,模拟人体手腕的真实转动角度。
8、作为本发明的优选方案,所述转动放大组件包括固定齿轮,固定齿轮相对于十字轴固定,手掌连接件上设置有从动齿轮,固定齿轮和从动齿轮啮合。由于固定齿轮相对于十字轴固定,则手掌连接件随手腕连接件转动时其上的从动齿轮会与主动啮合传动,手掌连接件相对于手腕连接件进一步转动,实现手掌连接件的转动角度的放大。
9、作为本发明的优选方案,所述旋转动力装置包括中心轴,中心轴上连接有电机定子,电机定子上套设有电机转子,电机转子连接有谐波减速单元,谐波减速单元的输出端与中心轴转动连接,谐波减速单元的输出端齿啮合有谐波刚轮,谐波刚轮固定于小臂结构上,中心轴的一端固定有后盖,后盖与谐波刚轮固定。
10、谐波减速单元的输出端的转速相对于凸轮的转速大幅降低,使得谐波减速机的输出端稳定且低速输出。谐波减速单元与谐波刚轮齿啮合,从而谐波减速机的输出端相对于凸轮具有较高的传动精度。谐波减速单元的输出端与中心轴转动连接,使得谐波减速单元的输出端能得到稳定支撑。
11、作为本发明的优选方案,所述谐波减速单元包括凸轮,凸轮固定于电机转子上,凸轮上安装有柔性轴承,柔性轴承的外圈套设有柔轮,柔轮与谐波刚轮齿啮合,柔轮的齿数小于谐波刚轮的齿数,柔轮上固定有输出法兰,柔轮与中心轴转动连接,输出法兰的外缘与主绳连接。
12、当电机通电后,电机转子相对于电机定子转动,电机转子带动凸轮转动,凸轮通过柔性轴承推动柔轮与谐波刚轮啮合传动。若柔轮的齿数比谐波刚轮的齿数少n,则凸轮转动一圈时,柔轮相对于谐波刚轮转动n个齿,从而连接于柔轮上的输出法兰得到较大减速,保证稳定的输出力,且通过齿传动以保证传动精度。
13、作为本发明的优选方案,所述凸轮的内侧与中心轴之间通过滚动轴承连接。中心轴对凸轮进行可靠支撑,且中心轴与凸轮能相对转动。
14、作为本发明的优选方案,所述凸轮和柔性轴承的形状均为椭圆形,柔轮在两个位置与谐波刚轮啮合。柔性轴承从两处推动柔轮与谐波刚轮啮合传动,保证柔轮与谐波刚轮稳定传动。
15、作为本发明的优选方案,所述旋转动力装置还包括交叉滚子轴承,交叉滚子轴承的内圈与输出法兰一体成型或固定连接,交叉滚子轴承的外圈与谐波刚轮一体成型或固定连接。交叉滚子轴承的外圈对谐波刚轮进行稳定支撑。
16、本发明的有益效果为:
17、本发明的两根主绳、副绳和张紧弹簧之间配合,可驱动手腕转动机构上下摆动、左右摆动或做二者的复合运动。在副绳的作用下,主绳能始终保证拉紧状态,保证十字轴和手腕转动机构在确定位置平衡。本发明的手腕动作机构能模拟人体手腕的上下转动、左右转动或二者的复合运动,其仿生性较高。
技术特征:
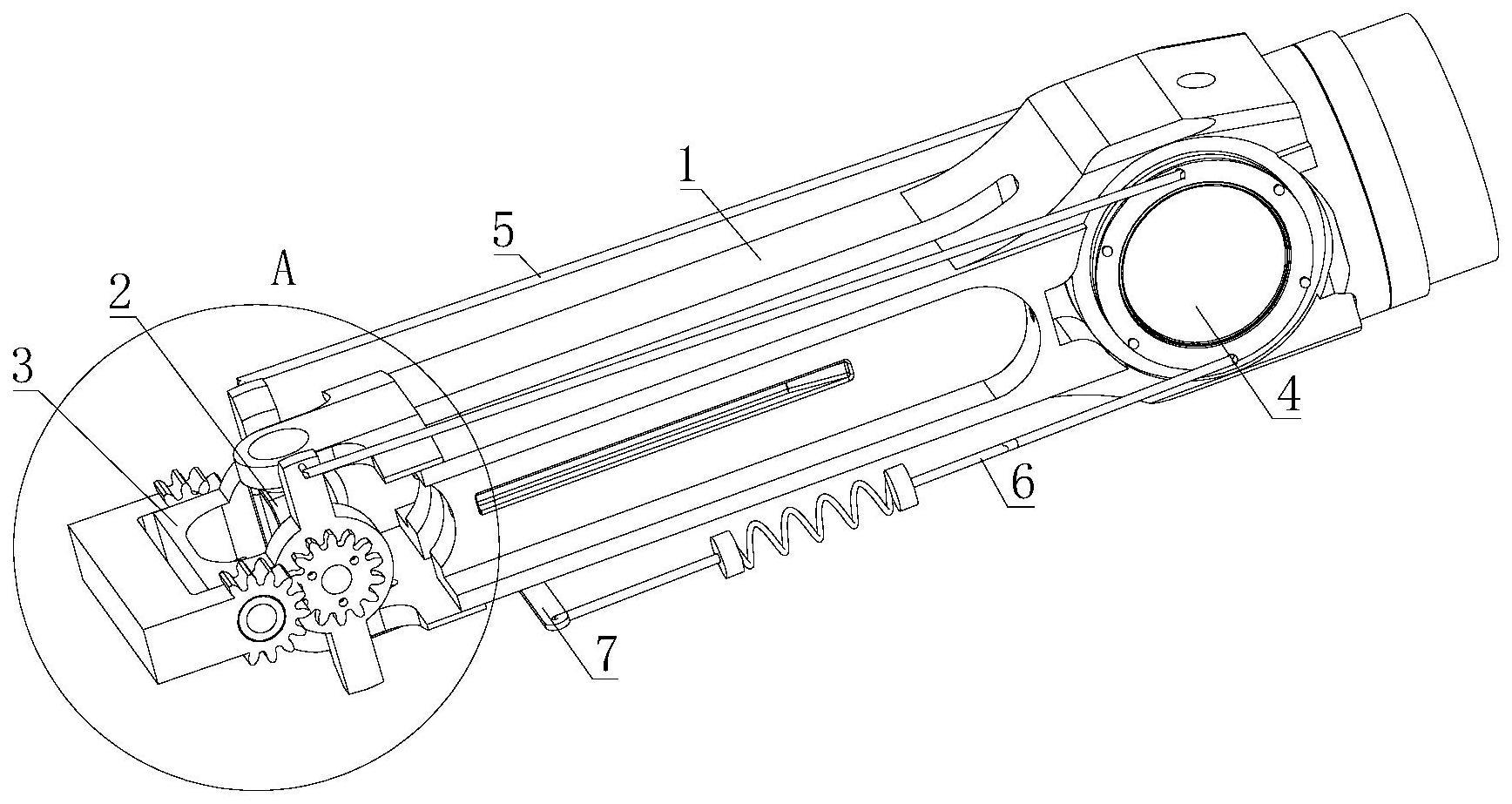
1.一种绳驱式手腕动作机构,其特征在于:包括小臂结构(1)、十字轴(2)和手腕转动机构(3),小臂结构(1)与十字轴(2)转动连接,手腕转动机构(3)分别与十字轴(2)的两侧转动连接,小臂结构(1)与十字轴(2)之间的转轴、十字轴(2)与手腕转动机构(3)之间的转轴垂直;所述小臂结构(1)上安装有两个旋转动力装置(4),旋转动力装置(4)的输出端的外缘连接有主绳(5),主绳(5)的另一端与手腕转动机构(3)的相应侧连接,主绳(5)与手腕转动机构(3)的连接点与手腕转动机构(3)的转轴错开;所述旋转动力装置(4)的输出端的外缘还连接有副绳(6),手腕转动机构(3)上转动连接有平衡连接件(7),副绳(6)的另一端与平衡连接件(7)连接;所述副绳(6)上连接有张紧弹簧(61)。
2.根据权利要求1所述的一种绳驱式手腕动作机构,其特征在于:两根主绳(5)在手腕转动机构(3)上的连接点分设于手腕转动机构(3)与十字轴(2)的转轴的两侧。
3.根据权利要求1所述的一种绳驱式手腕动作机构,其特征在于:所述平衡连接件(7)包括转动连接于手腕转动机构(3)上的连接杆(71),连接杆(71)上转动连接有水平板(72),两根副绳(6)分别连接于水平板(72)的两端。
4.根据权利要求1所述的一种绳驱式手腕动作机构,其特征在于:所述手腕转动机构(3)包括手腕连接件(31),手腕连接件(31)与十字轴(2)转动连接,平衡连接件(7)与手腕连接件(31)转动连接,手腕连接件(31)上转动连接有手掌连接件(32),手掌连接件(32)与手腕连接件(31)之间设置有用于驱动手掌连接件(32)相对于手腕连接件(31)转动的转动放大组件。
5.根据权利要求4所述的一种绳驱式手腕动作机构,其特征在于:所述转动放大组件包括固定齿轮(33),固定齿轮(33)相对于十字轴(2)固定,手掌连接件(32)上设置有从动齿轮(34),固定齿轮(33)和从动齿轮(34)啮合。
6.根据权利要求1所述的一种绳驱式手腕动作机构,其特征在于:所述旋转动力装置(4)包括中心轴(41),中心轴(41)上连接有电机定子(42),电机定子(42)上套设有电机转子(43),电机转子(43)连接有谐波减速单元(44),谐波减速单元(44)的输出端齿啮合有谐波刚轮(45),谐波刚轮(45)固定于小臂结构(1)上,中心轴(41)的一端固定有后盖(47),后盖(47)与谐波刚轮(45)固定。
7.根据权利要求6所述的一种绳驱式手腕动作机构,其特征在于:所述谐波减速单元(44)包括凸轮(441),凸轮(441)固定于电机转子(43)上,凸轮(441)上安装有柔性轴承(442),柔性轴承(442)的外圈套设有柔轮(443),柔轮(443)与谐波刚轮(45)齿啮合,柔轮(443)的齿数小于谐波刚轮(45)的齿数,柔轮(443)上固定有输出法兰(444),输出法兰(444)的外缘与主绳(5)连接。
8.根据权利要求7所述的一种绳驱式手腕动作机构,其特征在于:所述凸轮(441)的内侧与中心轴(41)之间通过滚动轴承(411)连接。
9.根据权利要求7所述的一种绳驱式手腕动作机构,其特征在于:所述凸轮(441)和柔性轴承(442)的形状均为椭圆形,柔轮(443)在两个位置与谐波刚轮(45)啮合。
10.根据权利要求7所述的一种绳驱式手腕动作机构,其特征在于:所述旋转动力装置还包括交叉滚子轴承(46),交叉滚子轴承(46)的内圈与输出法兰(444)一体成型或固定连接,交叉滚子轴承(46)的外圈与谐波刚轮(45)一体成型或固定连接。
技术总结
本发明属于仿生手腕技术领域,特别涉及一种绳驱式手腕动作机构。其技术方案为:一种绳驱式手腕动作机构,包括小臂结构、十字轴和手腕转动机构,小臂结构与十字轴转动连接,手腕转动机构分别与十字轴的两侧转动连接,小臂结构与十字轴之间的转轴、十字轴与手腕转动机构之间的转轴垂直;所述小臂结构上安装有两个旋转动力装置,旋转动力装置的输出端的外缘连接有主绳,主绳的另一端与手腕转动机构的相应侧连接,主绳与手腕转动机构的连接点与手腕转动机构的转轴错开;所述旋转动力装置的输出端的外缘还连接有副绳,手腕转动机构上转动连接有平衡连接件,副绳与平衡连接件连接。本发明提供了一种可模拟人体手腕上下摆动和左右摆动的绳驱式手腕动作机构。
技术研发人员:胡天链
受保护的技术使用者:四川福德机器人股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!