一种用于测试屏幕触控的移动复合机器人及方法与流程
本发明涉及智能机器人领域,特别涉及一种用于测试屏幕触控的移动复合机器人及方法。
背景技术:
1、随着科技的发展,越来越多的屏幕出现在我们的生活中,手机、电视、平板、汽车、工控等各行各业均有应用,此类屏幕在应用前均需要经过触控的方式对屏幕的功能进行验证测试,确保其性能。
2、一般的测试方式分两种。一种是人工测试,一种是机械式点触测试。
3、人工测试是测试人员待在固定工位上用手指操作屏幕实现测试,这种方式自动化程度低,效率低,工人工作强度较高。为了解决这些问题,本领域便衍生出了第二种测试方式—机械式点触测试。然而,机械式点触测试虽然解决了人工测试效率低下、自动化程度低、人工成本高等缺陷,却也存在自身的缺陷。
4、机械式点触测试则是将测试用机械固定在工位上,通过传送带或人工将待测试屏幕运输至测试台,这种方式功能单一,且无法实现移动柔性化作业,另外,随着触控式屏幕类型和功能的增多,例如触控功能也由单指衍变为两指、三指、四指等,现有的测试用机械无法满足现状触控测试要求。
5、因此,市面亟待一种可以解决机械式点触测试存在的问题的技术方案。
技术实现思路
1、为了解决触控式屏幕类型和功能的日益增多所引发的现有的测试用机械无法满足现状触控测试要求的问题,本发明中披露了一种用于测试屏幕触控的移动复合机器人及方法,本发明的技术方案是这样实施的:
2、一种用于测试屏幕触控的移动复合机器人,包括驱动组件、导航组件、移动底盘、协作机械手、仿形触控手和相机组件;
3、所述驱动组件设置于所述移动底盘下方,所述导航组件设置于所述移动底盘与所述驱动组件之间,所述协作机械手设置于所述移动底盘上方,所述仿形触控手设置于所述协作机械手一端,所述相机组件设置于所述仿形触控手上;
4、所述仿形触控手包括法兰座和若干个仿形触控手指;
5、所述若干个仿形触控手指安装于所述法兰座下表面;
6、所述移动底盘内部设置有中控系统和工控系统;
7、所述工控系统用于控制协作机械手、仿形触控和相机组件执行作业动作。
8、优选地,所述仿形触控手指包括第一连杆、第二连杆、第三连杆、第四连杆、动力推杆、第一转轴、第二转轴、第三转轴、第四转轴、第五转轴、第六转轴、弹簧和浮动压头;
9、所述第一连杆、所述第二连杆、所述第三连杆、所述第四连杆、所述第一转轴、所述第三转轴、所述第四转轴和所述第六转轴组成连杆机构;
10、所述动力推杆一端通过所述第二转轴连接所述法兰座,另一端通过所述第五转轴连接所述第四连杆;
11、所述浮动压头可滑动地安装于所述第四连杆下方,所述弹簧套于所述浮动压头上。
12、优选地,所述法兰座上设置有若干个仿形触控手指安装位,每个所述仿形触控手指均可拆卸地安装于所述仿形触控手指安装位上。
13、优选地,所述中控系统设置有无线接口。
14、一种用于测试屏幕触控的方法,使用一种用于测试屏幕触控的移动复合机器人。
15、包括步骤如下:
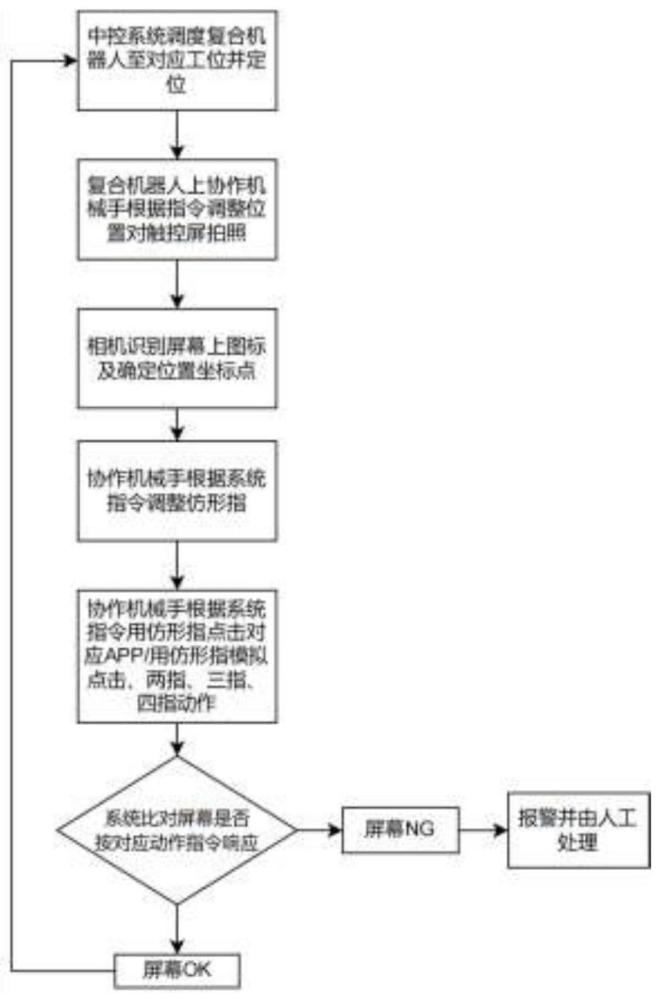
16、s1,机器人调度中心发出测试任务指令给复合机器人;
17、s2,中控系统根据测试任务指令移动控制驱动组件将复合机器人移动至测试工位;
18、s3,中控系统发送动作指令给工控系统,工控系统控制协作机械手调整位置直至相机组件拍摄到待测触控屏;
19、s4,相机组件识别待测触控屏的图标及坐标点位并传输给中控系统;
20、s5,中控系统基于s4的信息发出调整指令给工控系统调整仿形触控手的手型;
21、s6,协作机械手与触控手配合执行手势动作;
22、s7,相机组件实时监控触控屏对手势动作的响应并上传至中控系统;
23、s8,中控系统判断触控屏是否合格:
24、若触控屏按照手势动作进行了相应的响应,则判断触控屏合格,否则判断触控屏不合格;
25、s9,合格的触控屏通过传送装置送入合格区,不合格的触控屏由中控系统报警并通知人工处理。
26、优选地,所述s2中,当导航组件扫描到复合机器人运行路径上有障碍物时,中控系统发出避障指令给驱动组件,驱动组件执行避障指令绕开障碍物后回到原路径继续移动至测试工位。
27、优选地,所述s2中,若中控系统判断仿形触控手上的仿形触控手指数量与所要执行的测试任务无法匹配,则报警通知人工增加或减少仿形触控手指的数量。
28、优选地,所述s2中,测试工位的数量大于或等于1。
29、本发明解决了屏幕触控功能多样化、屏幕多样化、不同工位触控测试问题。
30、本发明中,移动底盘、协作机械手、相机、仿形触控手进行组合,可应对更多更广泛的应用场景,灵活性更高,智能化程度更高。
31、本发明中,移动复合机器人设置有无线接口,可通过远程操控终端无线操控。
32、本发明中,移动复合机器人具有自主导航、自动避障、远程操控等功能。
33、本发明中,移动复合机器人可自主导向充电站充电。
34、本发明中,移动复合机器人配置有协作机械手,可根据要求灵活变换各种姿态和测试角度。
35、本发明中,移动复合机器人配置有相机,可准确对屏幕上内容进行拍照定位,同时,还可获取屏幕平面及深度信息,从而还原测量物体的三维信息,进而用于后一步的处理。
36、本发明中,移动复合机器人配置有仿形触控手,仿形触控手又有多个仿形触控手指,每个触控手指可进行独立动作,从而能像人手一样柔性实现多种触控功能。
技术特征:
1.一种用于测试屏幕触控的移动复合机器人,其特征在于,包括驱动组件、导航组件、移动底盘、协作机械手、仿形触控手和相机组件;
2.根据权利要求1所述的一种用于测试屏幕触控的移动复合机器人,其特征在于,所述仿形触控手指包括第一连杆、第二连杆、第三连杆、第四连杆、动力推杆、第一转轴、第二转轴、第三转轴、第四转轴、第五转轴、第六转轴、弹簧和浮动压头;
3.根据权利要求2所述的一种用于测试屏幕触控的移动复合机器人,其特征在于,所述法兰座上设置有若干个仿形触控手指安装位,每个所述仿形触控手指均可拆卸地安装于所述仿形触控手指安装位上。
4.根据权利要求3所述的一种用于测试屏幕触控的移动复合机器人,其特征在于,所述中控系统设置有无线接口。
5.一种用于测试屏幕触控的方法,其特征在于,使用如权利要求3或4所述的一种用于测试屏幕触控的移动复合机器人。
6.根据权利要求5所述的一种用于测试屏幕触控的方法,其特征在于,包括步骤如下:
7.根据权利要求6所述的一种用于测试屏幕触控的方法,其特征在于,所述s2中,当导航组件扫描到复合机器人运行路径上有障碍物时,中控系统发出避障指令给驱动组件,驱动组件执行避障指令绕开障碍物后回到原路径继续移动至测试工位。
8.根据权利要求7所述的一种用于测试屏幕触控的方法,其特征在于,所述s2中,若中控系统判断仿形触控手上的仿形触控手指数量与所要执行的测试任务无法匹配,则报警通知人工增加或减少仿形触控手指的数量。
9.根据权利要求8所述的一种用于测试屏幕触控的方法,其特征在于,所述s2中,测试工位的数量大于或等于1。
技术总结
本发明涉及智能机器人领域的一种用于测试屏幕触控的移动复合机器人及方法,复合机器人包括驱动组件、导航组件、移动底盘、协作机械手、仿形触控手和相机组件;驱动组件设置于移动底盘下方,导航组件设置于移动底盘与驱动组件之间,协作机械手设置于移动底盘上方,仿形触控手设置于协作机械手一端,相机组件设置于仿形触控手上;仿形触控手包括法兰座和仿形触控手指;仿形触控手指安装于法兰座下方;移动底盘内部设置有中控系统和工控系统。本发明可自主移动,自动避障,相机组件对待测屏幕扫描定位,仿形触控手可根据系统指令来执行不同的动作,从而实现触控测试的目的。
技术研发人员:孙鹿奇,李洪涛,董易,李亮华
受保护的技术使用者:上海飒智智能科技有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!