弹性管液体传输机构与连续机器人弹性臂一体化的机器人
本发明涉及机器人领域,特别是涉及一种弹性管液体传输机构与连续机器人弹性臂一体化的机器人。
背景技术:
1、随着科技的发展,机器人在生产生活中得到了广泛的应用。相比于传统的多关节刚性机器人,柔性机器人以其在复杂环境下适应性强、交互安全性高、避障能力好的优越性,受到人们越来越多的关注和研究。常见的柔性机器人类型有气驱动、线驱动和sma驱动等。柔性机器人有着广阔的应用前景。然而,柔性机器人的精确运动轨迹控制仍面临诸多挑战。常见的柔性机器人变形描述有恒定曲率方法、cosserat梁和有限元法等,分段恒定曲率以其简单和直观的特点,在运动学建模中有着广泛的应用。
2、然而,现有柔性机械臂在进行作业时,需要安装相应辅助机构,结构复杂,同时现有技术不能很好地修正机器人运动学求解过程中的位姿误差。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种弹性管液体传输机构与连续机器人弹性臂一体化的机器人解决了现有柔性机械臂结构复杂,同时不能很好地修正机器人运动学求解过程中的位姿误差的问题。
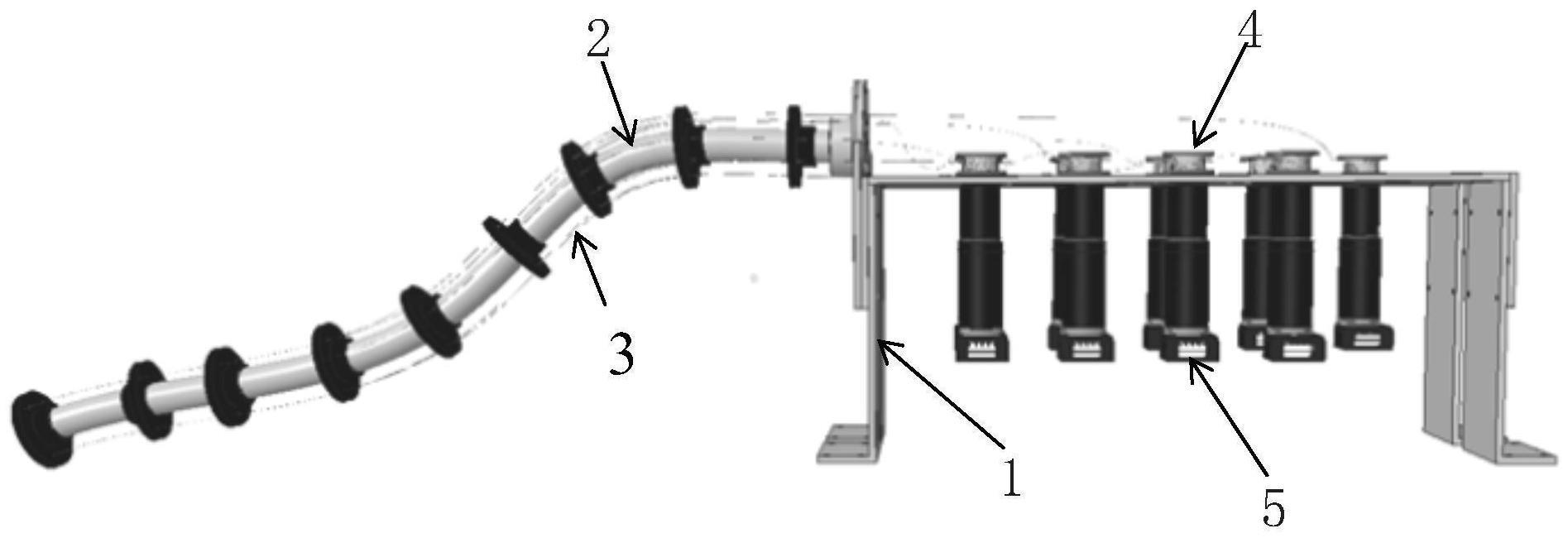
2、为了达到上述发明目的,本发明采用的技术方案为:一种弹性管液体传输机构与连续机器人弹性臂一体化的机器人,包括机架、弹性管、支撑圆盘、基座圆盘和驱动线,所述弹性管固定于机架上,所述弹性管分为多个臂段,每个臂段均依次设置基座圆盘和多个支撑圆盘,且每个支撑圆盘的间隔距离相等,所述基座圆盘和支撑圆盘均通过卡箍固结在弹性管上,所述支撑圆盘上分布有多个过孔,每3个间隔为120°的过孔为一组,用于通过一个臂段的驱动线,每组驱动线的一端通过基座圆盘和中间的支撑圆盘固结在所述臂段末端的支撑圆盘上,其另一端分别缠绕在设置机架上的多个绕线轮上,所述绕线轮上连接电机。
3、上述方案的有益效果是:本发明提出了一种线驱动、连续软体机器人,将弹性管作为机械臂本体,承担运动、支撑、输送任务。本发明通过将弹性管液体传输机构和连续机器人弹性臂进行一体化设计,从而不需要另外提供弹性支撑体,使机器人结构更加小巧且制造成本更低。机器人用于码头上对船只进行自动清洗,通过控制电机转动带动绕线轮旋转,使驱动线运动,利用每组驱动线分别对连续型机器人的各个臂段进行冗余驱动,实现各臂段的弯曲运动。
4、进一步地,驱动线采用超弹性合金材料。
5、上述进一步方案的有益效果是:通过上述技术方案,使结构更加小巧,可靠,可在狭小或不规则空间中进行作业。
6、除此之外,本发明还采用的技术方案为:一种弹性管液体传输机构与连续机器人弹性臂一体化的机器人的控制方法,包括以下步骤:
7、s1:基于弹性管液体传输机构与连续机器人弹性臂一体化的机器人,构建工作空间到臂段空间的位姿误差方程,修正机器人运动过程中的位姿误差;
8、s2:基于位姿误差方程求解虚拟关节变量,建立臂段空间到驱动空间的关系式,通过控制电机转动使机器人按照期望位姿进行运动;
9、s3:根据机器人的运动情况,使用结构光深度相机获取待清洗区域的环境状况,并基于yolov5模型进行实时在线目标检测,实时调整机器人位置,完成弹性管液体传输机构与连续机器人弹性臂一体化的机器人的控制。
10、上述方案的有益效果是:分别对工作空间到臂段空间,以及臂段空间到驱动空间进行分析,能够更好地修正机器人运动求解过程中的位姿误差,更好地控制机器人按照期望位置姿态进行运动;机器视觉实时进行目标检测,便于在线修正,调整机械臂位姿。本方案解决了现有技术不能很好地修正机器人运动学求解过程中的位姿误差的问题。
11、进一步地,s1中构建工作空间到臂段空间的位姿误差方程,包括以下分步骤:
12、s1-1:将臂段等效为一段等曲率的杆件,定义虚拟关节角向量q为:
13、
14、其中,和为各臂段的弯曲平面角,θ1、θ2和θ3为各臂段的弯曲角,t为矩阵的转置;
15、s1-2:基于虚拟关节角向量建立运动学位姿误差方程,将位姿跟踪误差e作为被控量,关节角速度作为控制量,控制目标为求取一个控制律使位姿跟踪误差e在指定时间收敛到零,利用非线性控制理论求解出关节角速度完成工作空间到臂段空间的位姿误差方程的构建,所述运动学位姿误差方程为:
16、
17、其中,a(q)为关于q的非线性函数,符号上方的点号表示对时间求导。
18、上述进一步方案的有益效果是:通过上述技术方案,完成工作空间到臂段空间的转换,实现机器人运动求解过程中位姿误差的修正。
19、进一步地,s2中建立臂段空间到驱动空间的关系式为:
20、第i孔第j臂段绳长改变量δli,j为:
21、
22、其中,i=1,2,…,9,j=1,2,3,r为支撑圆盘过孔与弹性管中心的距离,为j臂段弯曲平面,θj为j臂段弯曲角;
23、第s根绳相对于通过臂段无弯曲情况下绳子长度的改变量δls为:
24、δl1=δl1,1
25、δl4=δl4,1
26、δl7=δl7,1
27、δl2=δl2,1+δl2,2
28、δl5=δl5,1+δl5,2
29、δl8=δl8,1+δl8,2
30、δl3=δl3,1+δl3,2+δl3,3
31、δl6=δl6,1+δl6,2+δl6,3
32、δl9=δl9,1+δl9,2+δl9,3
33、s=1,2,…,9
34、对δli,j进行求导获得绕线轮的线速度为vc:
35、
36、绕线轮角速度ωc为:
37、ωc=vc/rc
38、其中,rc为绕线轮半径。
39、上述进一步方案的有益效果是:通过上述技术方案,建立了臂段空间到驱动空间的关系式,完成臂段空间到驱动空间的转换,有利于更好的控制机器人的运动。
40、进一步地,s2中使用单片机通过双环pid方法控制电机转动,包括以下分步骤:
41、s2-1:输入电机转速,利用电机编码器获取电机速度,计算速度偏差,并采用pid算法计算速度环控制器的输出,作为电流环的设定值;
42、s2-2:对速度环输出的电流设定值和实际电流进行偏差计算,并采用pid算法计算电流环控制器的输出;
43、s2-3:利用电流环的输出控制占空比,进而控制电机的转速。
44、上述进一步方案的有益效果是:通过使用双环pid对电机进行控制,易于工程实现,且具有较好的稳定性。
45、进一步地,s3中包括以下分步骤:
46、s3-1:采集待清洗区域的环境状况数据集,并对数据集进行图像随机变换和马赛克预处理;
47、s3-2:利用预处理后的数据集训练yolov5模型,并利用voc数据集的预训练模型进行迁移学习;
48、s3-3:基于迁移学习结果,利用训练后的yolov5模型进行目标检测,通过画面中绘制的锚框计算二维坐标;
49、s3-4:基于二维坐标,将结构光深度相机获取的深度图与rgb图进行配准,得到待清洗区域的笛卡尔空间坐标;
50、s3-5:将笛卡尔空间坐标和待清洗区域的位置及空间距离信息传输至控制板中,实时调整机器人位置。
51、上述进一步方案的有益效果是:由于连续型机器人作业环境复杂,传统的匀速清洗技术在该场景下存在清洗不充分,无法适应环境变换调整流量,无法适应实际使用的需求。因此本发明使用结构光深度相机获取待清洗区域的环境状况,然后利用基于yolov5模型进行目标检测,将彩色图与深度图对齐,获取待清洗区域的位置和空间距离信息,以实时调整机械臂位置,提高作业质量。
- 还没有人留言评论。精彩留言会获得点赞!