一种基于可变径柔性支撑的风电叶片内窥检测机器人的制作方法
本发明属于检测机器人,尤其涉及一种基于可变径柔性支撑的风电叶片内窥检测机器人。
背景技术:
1、风能作为一种无污染并颇具活力的可再生能源,其开发日益受到重视,风电叶片作为风电机组最重要的零部件,造价占整机的20%以上。风电叶片是玻璃钢蒙皮与大梁组成的空心体结构。受制造工艺、黏结工艺等随机因素的影响,风电叶片难免会带有空隙、裂纹、分层、脱黏等结构缺陷。其空心体内部缺陷的检测,尤为重要。已安装运行的风机叶片和新生产未出厂的叶片均需要进行内部检测。
2、目前风电叶片的检测手段基本为人员爬进空心体内部进行观察、判断。此种方法的弊端有两种,第一受叶片内部空间限制,瘦小的人员也只能进入到距叶根大约1/3处的位置,而容易出问题的位置在2/3左右的位置,能够检查的距离短,重要位置检查不到;第二由于进入叶片检查的人员经验、素质的不同,对缺陷的判断结果也不尽相同,很可能对缺陷做出误判、错判。
3、因此,需要设计一种基于可变径柔性支撑的风电叶片内窥检测机器人以解决上述问题。
技术实现思路
1、本发明的目的是提供一种基于可变径柔性支撑的风电叶片内窥检测机器人,以解决上述问题,达到提高风力发电叶片内部缺陷检测结果精确度的目的。
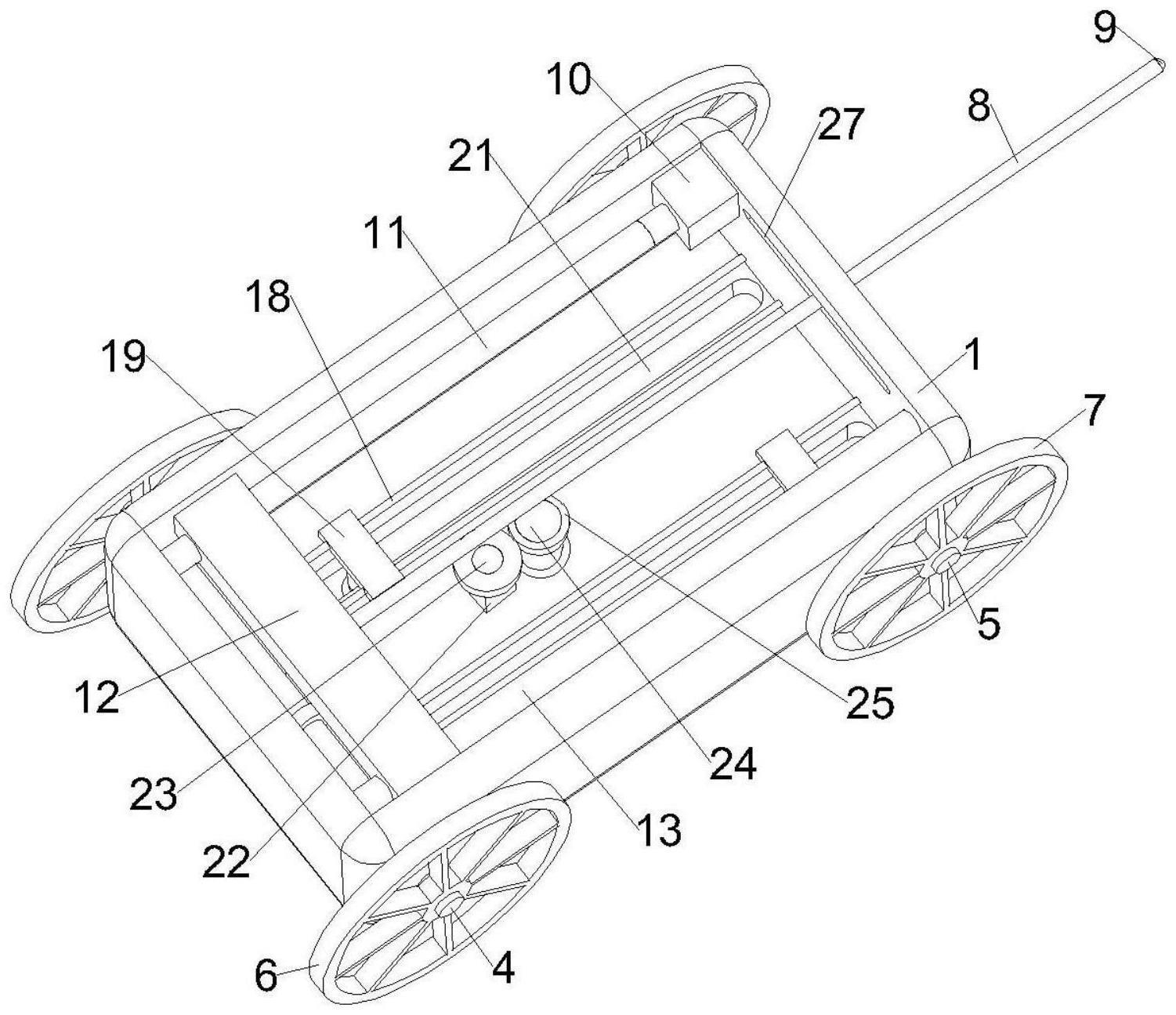
2、为实现上述目的,本发明提供了如下方案:一种基于可变径柔性支撑的风电叶片内窥检测机器人,包括外壳,所述外壳顶端铰接有顶盖,所述顶盖顶端中部固定连接有控制器,所述外壳底端设置有行走机构,所述外壳内底壁中部固定连接有转向部,所述转向部两侧设置有负压抓地机构,所述负压抓地机构底端与所述外壳内底壁顶端固定连接,所述外壳底壁开设有两个相互平行的第一通孔,两个所述第一通孔分别位于所述转向部两侧且与所述负压抓地机构一一对应,所述外壳内部上方固定设置有可调节图像检测机构,所述可调节图像检测机构一端穿过所述外壳侧壁位于所述外壳外侧,所述行走机构、所述转向部、所述负压抓地机构、所述可调节图像检测机构均与所述控制器电性连接,所述控制器内设置有卷积神经网络。
3、优选的,所述负压抓地机构包括第二电机,所述第二电机与所述外壳内底壁顶端固定连接,所述第二电机输出轴固定连接有水平设置的第二丝杠一端,所述第二丝杠另一端与所述外壳内侧壁转动连接,所述第二丝杠与所述第一通孔平行且位于所述第一通孔一侧上方,所述第二丝杠螺纹连接有第二滑座一端,所述第二滑座另一端滑动穿设有第二导向杆,所述第二导向杆与所述第一通孔平行且位于所述第一通孔另一侧上方,所述第二导向杆一端与所述外壳内侧壁固定连接,所述第二导向杆另一端固定连接有固定座,所述固定座底端与所述外壳内底壁顶端固定连接,所述第二滑座底端中部固定连接有竖直设置的负压抓地部,所述负压抓地部滑动设置在所述第一通孔内,所述第二电机、所述负压抓地部与所述控制器电性连接。
4、优选的,所述负压抓地部包括第二伸缩杆,所述第二伸缩杆竖直设置且顶端与所述第二滑座底端中部固定连接,所述第二伸缩杆滑动设置在所述第一通孔内,所述第二伸缩杆底端固定连接有负压吸头,所述负压吸头连通有负压机,所述第二伸缩杆、所述负压机均与所述控制器电性连接。
5、优选的,所述转向部包括转向电机,所述转向电机与所述外壳内底壁顶端固定连接,所述转向电机输出轴固定连接有第二主动齿轮,所述第二主动齿轮啮合有从动齿圈,所述从动齿圈固定套设在第一伸缩杆顶端,所述第一伸缩杆竖直设置,所述第一伸缩杆外侧壁中部固定连接有轴承内圈,所述轴承外圈与所述外壳底壁固定连接,所述第一伸缩杆底端固定连接有旋转台,所述转向电机、所述第一伸缩杆均与所述控制器电性连接。
6、优选的,所述可调节图像检测机构包括第一电机,所述第一电机与所述外壳内侧壁顶部固定连接,所述第一电机输出轴固定连接有水平设置的第一丝杠一端,所述第一丝杠另一端与所述外壳另一内侧壁转动连接,所述第一丝杠螺纹连接有第一滑座一端,所述第一滑座另一端滑动穿设有第一导向杆,所述第一导向杆与所述第一丝杠平行且两端均与所述外壳内侧壁顶部固定连接,所述第一滑座内部设置有检测部,所述检测部一端穿过所述外壳侧壁位于所述外壳外侧,所述第一电机、所述检测部均与所述控制器电性连接。
7、优选的,所述第一滑座侧壁中部开设有滑槽,所述检测部包括第三电机,所述第三电机固定嵌设在所述第一滑座内,所述第三电机输出轴固定连接有第三丝杠一端,所述第三丝杠另一端与所述滑槽侧壁转动连接,所述第三丝杠螺纹连接有固定杆一端,所述固定杆滑动设置在所述滑槽内,所述固定杆另一端穿过所述外壳侧壁顶部开设的第二通孔且固定连接有摄像头,所述摄像头位于所述外壳外侧,所述第三电机、所述摄像头均与所述控制器电性连接。
8、优选的,所述行走机构包括一个驱动轴、两个从动轴,所述驱动轴与所述外壳底部一端侧壁转动连接,所述驱动轴两端分别固定连接有主动轮,两个主动轮分别位于所述外壳外部两侧,所述驱动轴外侧壁中部固定连接有行走驱动部,所述行走驱动部与所述外壳内底壁顶端固定连接,所述从动轴与所述外壳底部另一端侧壁转动连接,每个所述从动轴上均固定连接有从动轮,两个所述从动轮分别位于所述外壳外部两侧,所述行走驱动部与所述控制器电性连接。
9、优选的,所述行走驱动部包括驱动电机,所述驱动电机与所述外壳内底壁顶端固定连接,所述驱动电机输出轴固定连接有第一主动齿轮,所述第一主动齿轮啮合有从动齿轮,所述从动齿轮固定套设在所述驱动轴外侧壁中部,所述驱动电机与所述控制器电性连接。
10、优选的,所述卷积神经网络包括:
11、输入层:将风力发电叶片内部照片输入cnn网络;
12、第一卷积层:使用32个5×5卷积核进行卷积操作,提取图像低级特征;
13、池化层:使用2×2最大池化层下采样特征图,减小参数量;
14、第二卷积层:使用64个3×3卷积核提取中级特征;
15、第三卷积层:使用128个3×3卷积核提取高级特征;
16、第一全连接层:将特征图拉直连接到含256个节点的第一全连接层;
17、第二全连接层:再连接到含5个节点的第二全连接层,对应5类缺陷类型,输出5个概率值;
18、选择概率最大的一个概率值作为预测结果;
19、损失函数使用交叉熵;
20、训练后测试集进行测试,计算准确率。
21、优选的,缺陷类型包括鼓包、褶皱、脱胶、裂痕、分层。
22、与现有技术相比,本发明具有如下优点和技术效果:
23、本发明通过设置的行走机构能够驱动整个机器人在叶片内部前进,从而对叶片内部进行全方位的检测,设置的转向部能够实现机器人的原地360°自由转向,提高机器人的整体灵活性,设置的负压抓地机构能够实现机器人在叶片内部大坡度表面的稳定行进,防止机器人出现倒退或侧翻,设置的可调节图像检测机构能够对叶片的内部缺陷进行全方位实时检测,并将检测结果传输到控制器内,设置的控制器能够利用其内部的卷积神经网络对接收到的检测结果进行判断,并输出判断结果,解决了人工检测判断结果受主观影响的问题,提高了检测结果的准确性和一致性。
- 还没有人留言评论。精彩留言会获得点赞!