基于双稳态折纸的空间捕获机械手
本发明属于捕获机械手,具体涉及一种基于双稳态折纸的空间捕获机械手。
背景技术:
1、空间捕获技术主要应用于航天器或空间站的舱外非合作目标的捕获,因此空间捕获应具备基本的捕获功能、传感分析功能、灵巧的工作空间、可应对不同捕获目标的工作模式、可控的捕获刚度与力度,此外考虑到在轨服务的特点,机器人还需要质量轻、体积小、收展比高且适应真空失重的工作环境。
2、cn 110405799 a公开一种多指灵巧机械手,该申请依靠多个原动机与电子控制系统实现手指活动,手指重量大,且控制难度大。
3、cn112027650 a公开一种柔性内凹件抓取机械手、抓取方法、分离机构及分离方法,该申请依靠支撑座、滑动穿设于支撑座中的滑杆、连接于滑杆上的随动座、以及沿支撑座周向铰接布设的至少三组手爪,能够实现对柔性内凹件的抓取,但其抓取方式较为单一,控制复杂,灵活性较差。
4、目前空间捕获机器人的研究主要分为刚体机器人和软体机器人,较传统刚性机器人而言,软体机器人表现出其优异的柔顺性和环境自适应性,但软体捕获机器人的研究仍处于理论阶段,因为真空失重环境或者捕获刚度与力度等因素难以应用于实际,但存在折展性差、体积大和迟缓笨重等缺点,无法对非合作目标有效捕获。因此有必要设计一种基于双稳态折纸的空间捕获机械手。
技术实现思路
1、针对现有技术存在的问题,本发明提供一种基于双稳态折纸的空间捕获机械手,过各面板和铰接件之间的相互配合实现抓取动作,舵机带动第六面板转动,进而带动所有面板收拢,再通过驱动机械臂使各面板相互靠拢,使机械臂锁定保持相对位置,从而形成椭球状薄壁结构快速实现抓取动作,具有抓取响应速度快、质量轻、收展比高和捕获效率高的优点,适用于空间非合作目标的精准捕获。
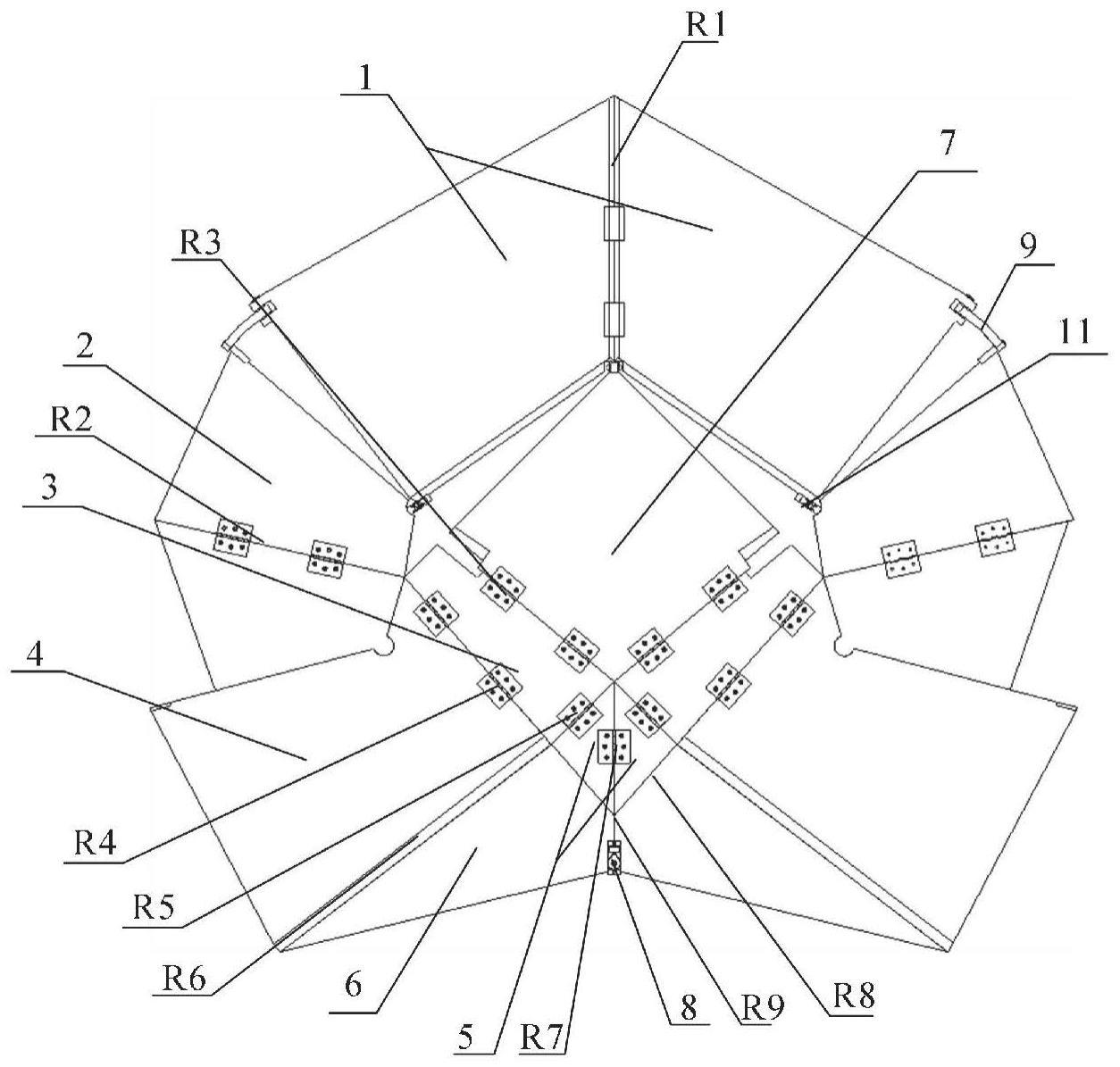
2、本发明提供了一种基于双稳态折纸的空间捕获机械手,其包括第一面板、第二面板、第三面板、第四面板、第五面板、第六面板、中心面板、舵机和机械臂,所述第一面板、第二面板、第三面板、第四面板、第五面板和第六面板均对称设置在所述中心面板的四周,且以所述中心面板的对角线为对称轴,相邻面板间通过折痕铰接,多个面板依次铰接联动,所述机械臂与所述中心面板的中心处连接;各面板间的连接关系为:对称设置的所述第一面板间通过第一转动副连接,所述第一面板的第一端通过连杆与所述第二面板的第一端转动连接,所述第一面板的第二端通过万向铰链与所述第二面板的第二端转动连接,对称设置的所述第一面板通过铰链件与所述中心面板转动连接,所述第二面板通过第二转动副与所述第四面板连接,所述第三面板通过第三转动副与所述中心面板连接,所述第四面板通过第四转动副与所述第三面板连接,所述第五面板通过第五转动副与所述第三面板连接,所述第四面板通过第六转动副与所述第六面板连接,对称设置的所述第五面板间通过第七转动副连接,所述第五面板通过第八转动副与所述第六面板连接,对称设置的所述第六面板间通过第九转动副连接,所述舵机与所述第九转动副的转轴连接;所述舵机驱动所述第九转动副的转轴转动,改变相邻所述第六面板之间的夹角,进而带动各面板依次收拢,再通过锁定所述机械臂,使各面板保持相对位置,形成椭球状薄壁结构快速实现合拢抓取动作;在完全伸展状态下,各面板相互平行,所述第二面板、第三面板和第四面板的铰接交汇点处两对角和为180°,所述第三面板、第四面板、第五面板和第六面板的铰接交汇点处两对角和为180°,且所述第四转动副的轴线与所述第八转动副的轴线重合;在完全合拢状态下,所述第二面板、第三面板与第四面板重叠,所述第五面板与所述第六面板重叠。
3、可优选的是,所述第一转动副、第二转动副、第四转动副、第五转动副、第八转动副和第九转动副均为凸形折痕,且所述凸形折痕的铰接合页设置在连接面板的第一端面上。
4、可优选的是,所述第三转动副、第六转动副和第七转动副均为凹形折痕,且所述凹形折痕的铰接合页设置在连接面板的第二端面上。
5、可优选的是,所述凸形折痕和凹形折痕的转角范围均在180°内,且所述凸形折痕和凹形折痕的转动方向相反。
6、可优选的是,所述第一面板、第二面板、第三面板、第六面板和中心面板均为四边形结构,所述第五面板为三角形结构。
7、可优选的是,所述第一面板与所述中心面板的连接边为倒角结构,且所述第二面板厚度为所述中心面板厚度的1/2,使所述第二面板、第三面板和第四面板间在伸展状态下相重叠。
8、可优选的是,所述第五面板厚度为所述中心面板厚度的1/2,使所述第五面板间能组合且运动处于非干涉状态。
9、可优选的是,所述铰接件上第一面板的转轴轴线与所述中心面板的转轴轴线相互垂直。
10、可优选的是,所述万向铰链结构为:所述第一面板的转轴与所述第二面板的转轴通过万向节转动连接。
11、本发明与现有技术相比,具有如下优点:
12、本发明基于双稳态折纸的空间捕获机械手,通过舵机带动第六面板间的转轴转动,进而带动所有面板收拢,再通过驱动机械臂使各面板相互靠拢,使机械臂锁定且使各面板保持相对位置,形成椭球状薄壁结构快速实现抓取动作,具有抓取响应速度快、质量轻、收展比高和捕获效率高等优点,适用于空间非合作目标捕获。
技术特征:
1.一种基于双稳态折纸的空间捕获机械手,其特征在于,其包括第一面板、第二面板、第三面板、第四面板、第五面板、第六面板、中心面板、舵机和机械臂,所述第一面板、第二面板、第三面板、第四面板、第五面板和第六面板均对称设置在所述中心面板的四周,且以所述中心面板的对角线为对称轴,相邻面板间通过折痕铰接,多个面板依次铰接联动,所述机械臂与所述中心面板的中心处连接;
2.根据权利要求1所述的基于双稳态折纸的空间捕获机械手,其特征在于,所述第一转动副、第二转动副、第四转动副、第五转动副、第八转动副和第九转动副均为凸形折痕,且所述凸形折痕的铰接合页设置在连接面板的第一端面上。
3.根据权利要求1所述的基于双稳态折纸的空间捕获机械手,其特征在于,所述第三转动副、第六转动副和第七转动副均为凹形折痕,且所述凹形折痕的铰接合页设置在连接面板的第二端面上。
4.根据权利要求3所述的基于双稳态折纸的空间捕获机械手,其特征在于,凸形折痕和凹形折痕的转角范围均在180°内,且所述凸形折痕和凹形折痕的转动方向相反。
5.根据权利要求1所述的基于双稳态折纸的空间捕获机械手,其特征在于,所述第一面板、第二面板、第三面板、第六面板和中心面板均为四边形结构,所述第五面板为三角形结构。
6.根据权利要求1所述的基于双稳态折纸的空间捕获机械手,其特征在于,所述第一面板与所述中心面板的连接边为倒角结构,且所述第二面板厚度为所述中心面板厚度的1/2,使所述第二面板、第三面板和第四面板间在伸展状态下相重叠。
7.根据权利要求1所述的基于双稳态折纸的空间捕获机械手,其特征在于,所述第五面板厚度为所述中心面板厚度的1/2,使所述第五面板间能组合且运动处于非干涉状态。
8.根据权利要求1所述的基于双稳态折纸的空间捕获机械手,其特征在于,所述铰接件上第一面板的转轴轴线与所述中心面板的转轴轴线相互垂直。
9.根据权利要求1所述的基于双稳态折纸的空间捕获机械手,其特征在于,所述万向铰链结构为:所述第一面板的转轴与所述第二面板的转轴通过万向节转动连接。
技术总结
本发明提供一种基于双稳态折纸的空间捕获机械手,其包括第一面板、第二面板、第三面板、第四面板、第五面板、第六面板、中心面板、舵机和机械臂,第一面板、第二面板、第三面板、第四面板、第五面板和第六面板均对称设置在中心面板的四周,且以中心面板的对角线为对称轴,相邻面板间通过折痕铰接,多个面板依次铰接联动,机械臂与中心面板的中心处连接;本发明将折纸与机构设计相结合,通过舵机改变第六面板间的夹角,进而带动各面板收拢,再通过机械臂锁定且保持相对位置,从而形成椭球状薄壁结构快速实现抓取动作,具有抓取响应速度快、质量轻、收展比高和捕获效率高的优点,用于空间非合作目标的精准捕获。
技术研发人员:韩博,董晋铭,王奕航,李少哲,张嘉川,赵永生
受保护的技术使用者:燕山大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!