机器人的制作方法
本发明涉及一种机器人及机器人系统。
背景技术:
1、以往,已知一种执行保持对象物的作业等的工业用机器人。这样的工业用机器人是例如具备有多个臂的机械臂,通常在机械臂的前端,安装有保持对象物的手等末端执行器。
2、此处,用于驱动末端执行器的布线或布管优选配置为能够从末端执行器容易地绕至机械臂,并且不会妨碍末端执行器的作业。另外,期望该布线或布管不易损伤且可保证长期可靠性。
3、例如,专利文献1中公开了一种具备臂、双臂支承于臂的升降部以及连接于升降部的末端执行器的机器人,在升降部及臂上,分别形成有用于插入布线的贯通孔。而且,在专利文献1所述的机器人中,为了使连接于末端执行器的布线不会妨碍作业,布线穿过形成于升降部的贯通孔,绕至臂与升降部之间的空间,穿过形成于臂的贯通孔,引出至臂的侧壁部。
4、专利文献1:日本特开2015-160305号公报
5、然而,在专利文献1所述的机器人中,虽然布线不会妨碍作业,但是由于升降部是双臂支承于臂,因此难以将布线从末端执行器绕至臂的侧壁部。另外,在所涉及的机器人中,布线可能会随着升降部或臂的动作而被形成于臂的贯通孔摩擦导致受损。
6、另外,通常在机器人上,设置有限制臂的动作范围的机械止挡件,但是可能会由于布线夹在该机械止挡件中,而导致布线损伤。
技术实现思路
1、本发明是为了解决上课题中的至少一部分而做出的,可以作为以下的应用示例或方式来实现。
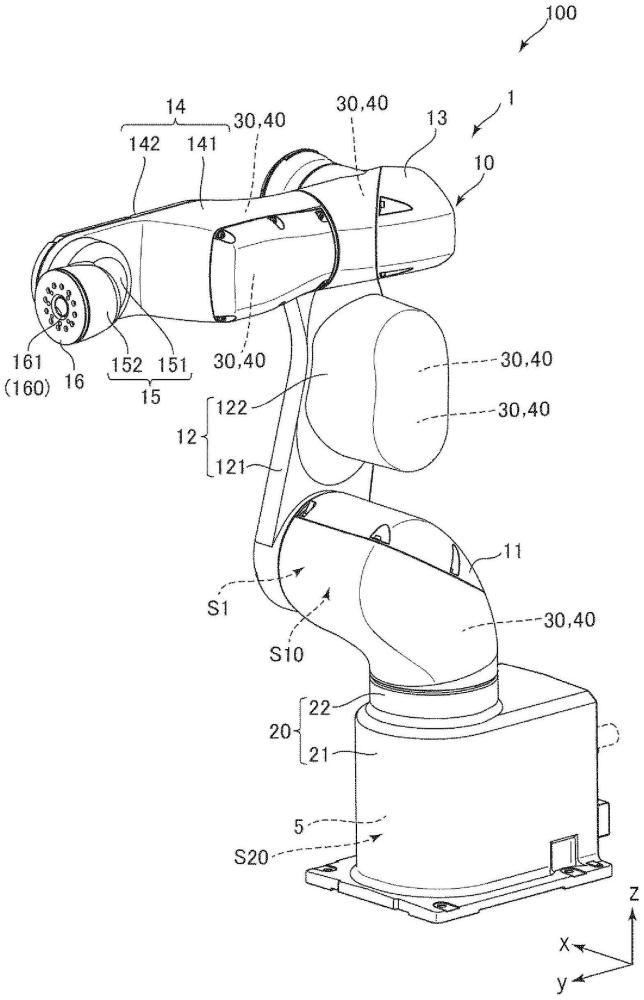
2、本应用示例的机器人,其特征在于,具备包括机械臂的机器人主体部,该机械臂具有:a臂,可绕a转动轴转动;b臂,悬臂支承于所述a臂,可绕b转动轴转动;以及c臂,连接于所述b臂,且能够安装末端执行器,并且可绕c转动轴转动,所述a臂具有第一卡合部,所述b臂具有:固定部,对具有连接于所述末端执行器的布线及布管中的至少一个的可挠性部件的位置进行限制;以及第二卡合部,可与所述第一卡合部卡合,所述c臂具有能够插入所述可挠性部件且沿着所述c转动轴的轴线方向贯通的贯通孔,所述机械臂具有限制部,该限制部构成为包括所述第一卡合部及所述第二卡合部,通过所述第一卡合部与所述第二卡合部卡合而对所述b臂相对于所述a臂的转动进行限制,所述限制部在所述a臂与所述b臂连接的状态下,不会暴露在所述机械臂的外部。
3、根据这样的机器人,通过c臂具有能够插入可挠性部件的贯通孔,b臂具有限制可挠性部件的位置的固定部,从而能够防止因机械臂的动作而造成的可挠性部件的晃动以及对可挠性部件和外围设备的干扰。另外,b臂悬臂支承于a臂,从而能够容易地进行可挠性部件的绕线,也能够减少可挠性部件的损伤。进而,发挥作为所谓机械止挡件的功能的限制部以不暴露在机械臂的外部的方式设置在机械臂的内部,因此也能够减少限制部对可挠性部件的损伤。
4、在本应用示例的机器人中,优选的是,所述b臂具有能够插入所述可挠性部件且连通于所述c臂具有的所述贯通孔的孔,所述c臂具有的所述贯通孔、所述b臂具有的所述孔以及所述固定部沿着所述c转动轴的轴线方向排列设置。
5、由此,能够容易地进行可挠性部件的绕线。
6、在本应用示例的机器人中,优选的是,所述b臂具备连接于所述a臂的第一部分以及具有所述孔的第二部分,所述第一部分与所述第二部分以所述孔的两端朝外部敞开的方式连接。
7、由此,能够容易地进行可挠性部件的绕线。
8、在本应用示例的机器人中,优选的是,所述固定部设置于所述第一部分。
9、由此,能够适当地限制(固定)从贯通孔引出的可挠性部件的位置,从而能够更有效地减少可挠性部件的晃动。
10、在本应用示例的机器人中,优选的是,所述第二卡合部是设置于所述b臂的内表面的凸部。
11、由此,能够以比较简单的结构构成不会暴露在机械臂的外部的限制部。
12、在本应用示例的机器人中,优选的是,所述第一卡合部是设置于所述a臂的外表面的凸部。
13、由此,能够以比较简单的结构构成不会暴露在机械臂的外部的限制部。
14、在本应用示例的机器人中,优选的是,具备设置于所述机器人主体部内的控制基板以及电源基板,所述电源基板对所述控制基板供给电力。
15、由此,具有作为控制器的功能的控制基板及电源基板与机器人主体部形成为一体,因此,相比于机器人主体部与控制器分开设置的情况,能够提高机器人的配置的自由度。
16、本应用示例的机器人系统,其特征在于,具备包括机械臂的机器人以及控制装置,所述机械臂具有:a臂,可绕a转动轴转动;b臂,悬臂支承于所述a臂且可绕b转动轴转动;以及c臂,连接于所述b臂,且能够安装末端执行器,并且可绕c转动轴转动,所述控制装置具有与所述机器人分开设置的控制基板以及电源基板,所述电源基板对所述控制基板供给电力,所述a臂具有第一卡合部,所述b臂具有:固定部,对具有连接于所述末端执行器的布线及布管中的至少一个的可挠性部件的位置进行限制;以及第二卡合部,可与所述第一卡合部卡合,所述c臂具有能够插入所述可挠性部件、沿着所述c转动轴的轴线方向贯通的贯通孔,所述机械臂具有限制部,该限制部包括所述第一卡合部及所述第二卡合部而构成,通过所述第一卡合部与所述第二卡合部卡合而对所述b臂相对于所述a臂的转动进行限制,所述限制部在所述a臂与所述b臂连接的状态下,不会暴露到所述机械臂的外部。
17、根据这样的机器人系统,能够防止因机械臂的动作而造成的可挠性部件的晃动以及对可挠性部件和外围设备的干扰。另外,能够容易地进行可挠性部件的绕线,也能够减少可挠性部件的损伤。
技术特征:
1.一种机器人,其特征在于,能够安装末端执行器,
2.根据权利要求1所述的机器人,其特征在于,
3.根据权利要求1所述的机器人,其特征在于,
4.根据权利要求3所述的机器人,其特征在于,
5.根据权利要求4所述的机器人,其特征在于,
6.根据权利要求1所述的机器人,其特征在于,
7.一种机器人系统,其特征在于,具有:
技术总结
提供一种机器人,能够将连接于末端执行器的布线容易地绕至机械臂并且不易损伤布线。一种机器人,其特征在于,具备机械臂,该机械臂具有A臂、悬臂支承于所述A臂的B臂以及可安装末端执行器且可绕C转动轴转动的C臂,所述A臂具有第一卡合部,所述B臂具有限制可挠性部件的位置的固定部以及第二卡合部,所述C臂具有贯通孔,所述机械臂具有构成为包括所述第一卡合部及所述第二卡合部,且对所述B臂相对于所述A臂的转动进行限制的限制部,所述限制部在所述A臂与所述B臂连接的状态下,不会暴露在所述机械臂的外部。
技术研发人员:大轮拓矢,高桥优
受保护的技术使用者:精工爱普生株式会社
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!