灯导膜片组装机械手的制作方法
本发明涉及机械手,尤其涉及一种灯导膜片组装机械手。
背景技术:
1、在背光源产品组装生产过程中,将灯导膜片插入产品铁框的侧槽中是极为重要的一步。
2、目前,部分背光源产品中,为了提高产品光源的打光质量,在产品铁框的侧槽内上沿增加了一种小反射片,小反射片遮挡于灯导膜片的上方。对于这种结构,现有一般采用人工手动操作的方式将灯导膜片插入产品铁框的侧槽内。但是,人工手动操作存在如下缺陷:其一效率较低,难以满足生产要求;其二,灯导膜片容易与上方的小反射片干涉,导致灯导膜片插入失败以及小反射片折损,影响良品率。
技术实现思路
1、为克服现有人工组装灯导膜片存在的效率低以及良品率低的技术缺陷,本发明提供了一种灯导膜片组装机械手。
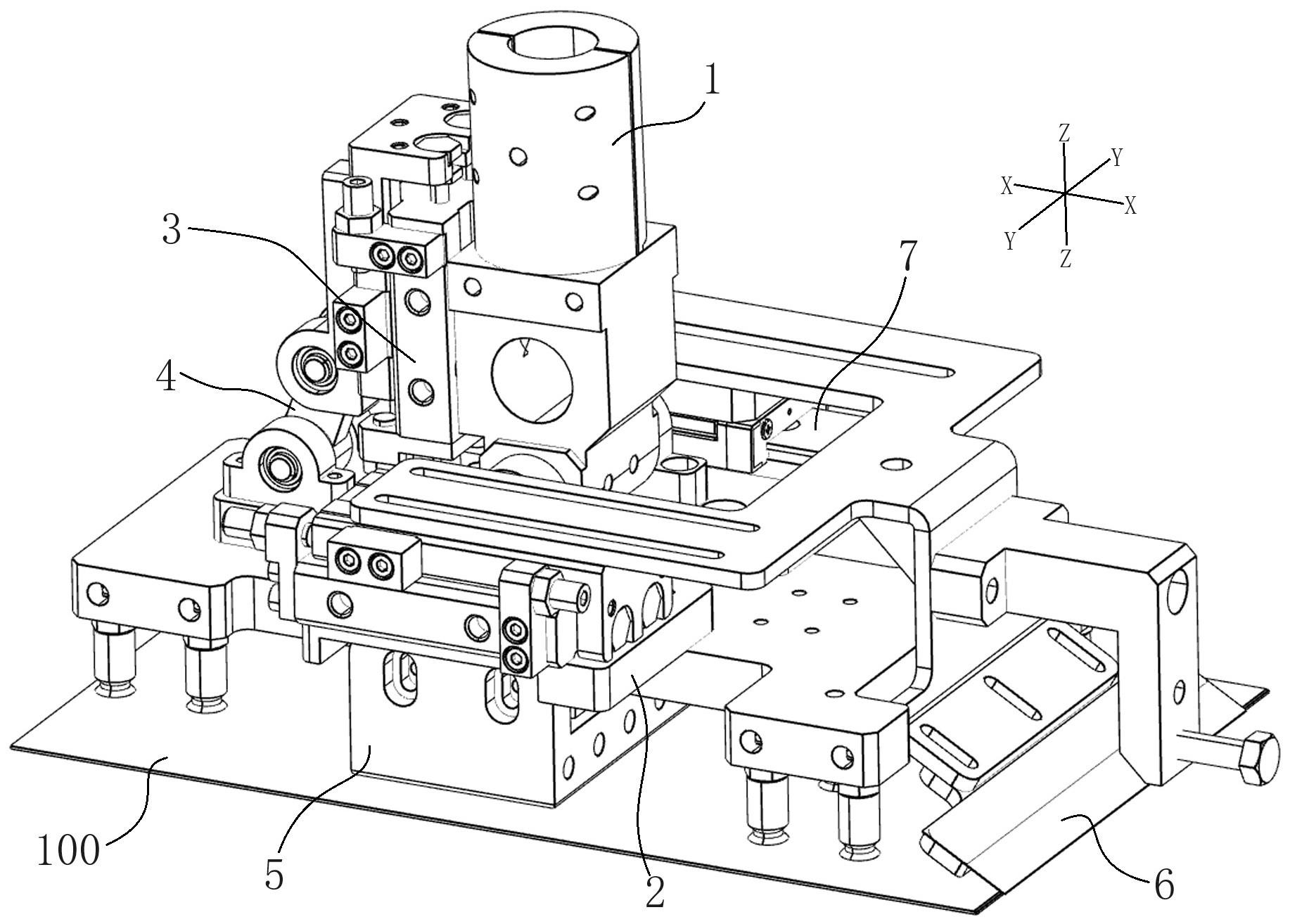
2、本发明提供的灯导膜片组装机械手,包括:
3、连接座,其适于连接机械臂;
4、安装板,其水平布置且通过第一y向轴铰接在所述连接座的下端;
5、z向驱动副,其固定部连接在所述连接座的x向一侧;
6、联动臂,其第一端通过第二y向轴与所述z向驱动副的移动部铰接、第二端通过第三y向轴与所述安装板铰接;
7、吸附组件,其安装在所述安装板的下方且适于吸附灯导膜片;
8、导流组件,其包括x向驱动副、安装架和拨片,所述x向驱动副的固定部连接在所述安装板上,所述安装架与所述x向驱动副的移动部固定连接,所述拨片固定在所述安装架的前端下方,所述拨片倾斜布置且适于在插入灯导膜片之前将小反射片抬起。
9、工作时,将连接座与机械臂固定连接,机械臂带动整个机械手移动至灯导膜片的正上方对准,使得灯导膜片在x向上背离z向驱动副的一端预留区域用以插入组装,然后机械臂带动机械手下降使吸附组件接触灯导膜片并吸取,接着机械臂带动机械手移动至待装配的产品铁框正上方对准,此时z向驱动副上升使安装板倾斜,从而使得灯导膜片倾斜并且所预留区域相对较低,最后机械臂带动机械手x向移动,拨片首先接触小反射片并将其抬起,而后灯导膜片的预留区域插入产品侧槽内完成组装。
10、可选的,所述吸附组件包括吸块和位于所述吸块x向一侧或两侧的吸笔。
11、可选的,所述吸附组件还包括连接板,所述连接板平行于所述安装板且固定连接在所述安装板的下方,所述连接板外伸于所述安装板的z向两侧形成外伸部,所述吸块固定连接在所述连接板的中部下方,所述吸笔固定连接在所述外伸部的下方。
12、可选的,所述吸块为u形块,所述u形块的两个翼部分别固定连接在所述连接板在y向上相对的两个侧壁上。
13、可选的,所述安装板上设有两个第一轴承座,所述第一y向轴贯穿固定在所述连接座的下端且两端分别安装在两个第一轴承座内;所述z向驱动副的移动部上设有两个第二轴承座,所述第二y向轴贯穿固定在所述联动臂的第一端且两端分别安装在两个第二轴承座内;所述安装板上还设有两个第三轴承座,所述第三y向轴贯穿固定在所述联动臂的第二端且两端分别安装在两个第三轴承座内。
14、可选的,所述z向驱动副和x向驱动副皆为气缸。
15、可选的,所述拨片为塑料拨片。
16、可选的,所述安装架的y向一侧与所述x向驱动副的移动部连接、y向另一侧通过x向导轨副安装在所述安装板上。
17、可选的,所述导流组件还包括限位件,所述限位件固定在所述安装架上,所述限位件适于抵接外界阻挡结构以控制所述拨片的极限位置。
18、可选的,所述限位件包括支架和限位杆,所述支架固定连接在所述安装架的前端,所述限位杆固定连接在所述支架的前端。
19、本发明提供的技术方案与现有技术相比具有如下优点:
20、本发明提供的灯导膜片组装机械手,在插入灯导膜片时,拨片首先会将小反射片抬起,而后灯导膜片再插入至产品侧槽内,如此实现采用机械代替人工完成灯导膜片的插入组装。相对于现有人工手动组装而言,本机械手能够与整体背光源产品组装生产线整合,提高生产效率;并且插入时通过拨片能够将小反射片抬起,有效避免了灯导膜片与小反射片的干涉碰撞导致的小反射片折损,同时也保证了灯导膜片的成功插入组装,从而保证了良品率。
技术特征:
1.一种灯导膜片组装机械手,其特征在于,包括:
2.根据权利要求1所述的灯导膜片组装机械手,其特征在于,所述吸附组件(5)包括吸块(51)和位于所述吸块(51)x向一侧或两侧的吸笔(52)。
3.根据权利要求2所述的灯导膜片组装机械手,其特征在于,所述吸附组件(5)还包括连接板(53),所述连接板(53)平行于所述安装板(2)且固定连接在所述安装板(2)的下方,所述连接板(53)外伸于所述安装板(2)的z向两侧形成外伸部,所述吸块(51)固定连接在所述连接板(53)的中部下方,所述吸笔(52)固定连接在所述外伸部的下方。
4.根据权利要求3所述的灯导膜片组装机械手,其特征在于,所述吸块(51)为u形块,所述u形块的两个翼部分别固定连接在所述连接板(53)在y向上相对的两个侧壁上。
5.根据权利要求1所述的灯导膜片组装机械手,其特征在于,所述安装板(2)上设有两个第一轴承座(21),所述第一y向轴(11)贯穿固定在所述连接座(1)的下端且两端分别安装在两个第一轴承座(21)内;所述z向驱动副(3)的移动部上设有两个第二轴承座(31),所述第二y向轴(41)贯穿固定在所述联动臂(4)的第一端且两端分别安装在两个第二轴承座(31)内;所述安装板(2)上还设有两个第三轴承座(22),所述第三y向轴(42)贯穿固定在所述联动臂(4)的第二端且两端分别安装在两个第三轴承座(22)内。
6.根据权利要求1所述的灯导膜片组装机械手,其特征在于,所述z向驱动副(3)和x向驱动副(61)皆为气缸。
7.根据权利要求1所述的灯导膜片组装机械手,其特征在于,所述拨片(63)为塑料材质。
8.根据权利要求1所述的灯导膜片组装机械手,其特征在于,所述安装架(62)的y向一侧与所述x向驱动副(61)的移动部连接、y向另一侧通过x向导轨副(7)安装在所述安装板(2)上。
9.根据权利要求1至8任一项所述的灯导膜片组装机械手,其特征在于,所述导流组件(6)还包括限位件(64),所述限位件(64)固定在所述安装架(62)上,所述限位件(64)适于抵接外界阻挡结构以控制所述拨片(63)的极限位置。
10.根据权利要求9所述的灯导膜片组装机械手,其特征在于,所述限位件(64)包括支架(641)和限位杆(642),所述支架(641)固定连接在所述安装架(62)的前端,所述限位杆(642)固定连接在所述支架(641)的前端。
技术总结
本发明涉及机械手技术领域,具体涉及一种灯导膜片组装机械手,包括连接座、安装板、Z向驱动副、联动臂、吸附组件和导流部件,安装板通过第一Y向轴铰接在连接座的下端,联动臂的第一端通过第二Y向轴与Z向驱动副的移动部铰接、第二端通过第三Y向轴与安装板铰接,吸附组件安装在安装板的下方,导流组件包括X向驱动副、安装架和拨片,安装架与X向驱动副的移动部固定连接,拨片固定在安装架的前端下方,拨片倾斜布置。本机械手能够与整体背光源产品组装生产线整合,提高生产效率;并且插入时通过拨片能够将小反射片抬起,有效避免灯导膜片与小反射片的干涉碰撞导致的小反射片折损,同时也保证灯导膜片的成功插入组装,从而保证良品率。
技术研发人员:田伟东,高艳,李小鹏,高鹏,赵磊,梁晓川,王志鹏,孙贝贝,栗万羽,梁栋,陈万良,苏晓东,贺栋瑜,王艳婷
受保护的技术使用者:中电科风华信息装备股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!