基于RBF神经网络补偿的抑振方法与系统
本发明涉及柔性机械臂的振动抑制,尤其涉及一种基于rbf神经网络补偿的抑振方法与系统。
背景技术:
1、空间柔性机械臂具有智能化、可扩展性和高精度特点。空间柔性机械臂技术在航天探索领域的作用越来越重要,正逐渐成为空间操作中不可或缺的重要组成部分。为了使空间机械臂能够在空间操作中抓取各种物体并完成复杂的维护任务,需要配备能够抓取各种不规则物体的轻型抓取机构——欠驱动手。然而,在高速运动过程中,由于空间柔性机械臂是由轻质材料制成的细长结构,会引起末端颤振。进而影响空间任务抓取过程中的控制精度。而且不确定的抓取对象会导致传动系统动力学参数的变化,从而加剧空间柔性机械臂的控制难度。此外,空间柔性机械臂中还使用了带有谐波减速器和柔性联轴器的传动装置,具有一定的传递柔性。这也会影响空间柔性机械臂的操作精度,甚至导致航天任务的失败。因此如何提出一种能够抑制空间柔性机械臂振动,以提高控制精度的方案成为目前亟待解决的问题。
技术实现思路
1、(一)要解决的技术问题
2、鉴于现有技术的上述缺点、不足,本发明提供一种基于rbf神经网络补偿的抑振方法与系统,其解决了如何抑制空间柔性机械臂的末端振动的技术问题。
3、(二)技术方案
4、为了达到上述目的,本发明采用的主要技术方案包括:
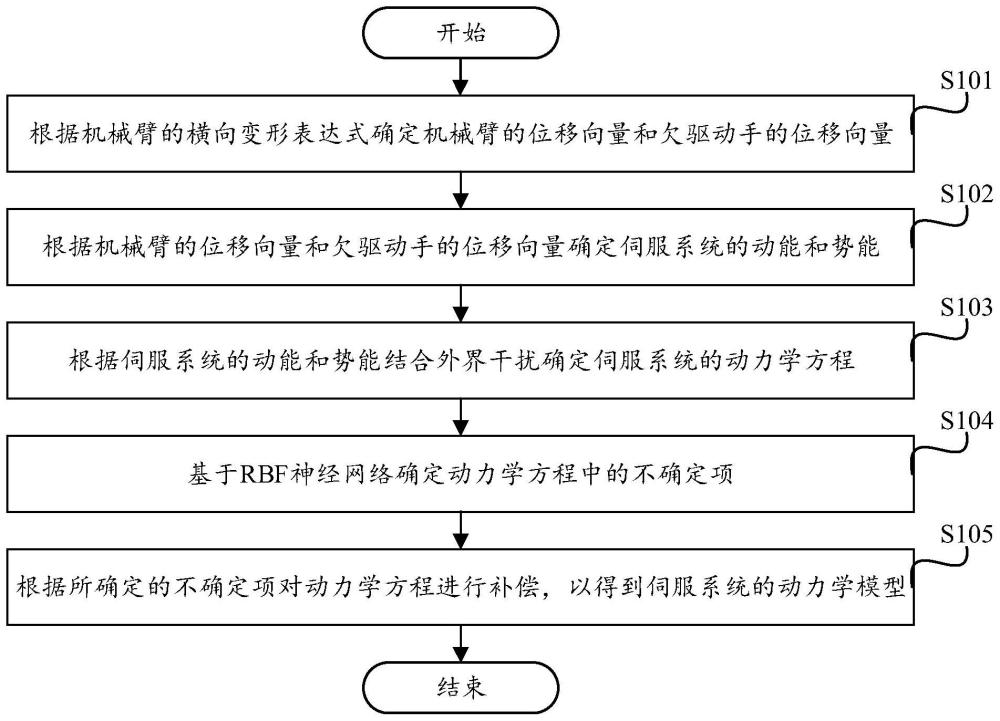
5、第一方面,本发明提供一种基于rbf神经网络补偿的抑振方法,用于设置有欠驱动手结构的空间柔性机械臂,该方法包括:根据机械臂的横向变形表达式确定机械臂的位移向量和欠驱动手的位移向量;
6、根据机械臂的位移向量和欠驱动手的位移向量确定伺服系统的动能和势能;
7、根据伺服系统的动能和势能结合外界干扰确定伺服系统的动力学方程;
8、基于rbf神经网络确定动力学方程中的不确定项;
9、根据所确定的不确定项对动力学方程进行补偿,以得到伺服系统的动力学模型。
10、可选地,机械臂的横向变形表达式为:
11、ux(x,t)=β1(t)δ1(x)
12、其中,x为机械臂上任意一点的横坐标,t为时间,ux(x,t)为机械臂的横向变形,β1(t)为一阶模态坐标,δ1(x)为一阶模态函数。
13、可选地,机械臂的位移向量为:
14、
15、其中,rx为机械臂的位移,θ为机械臂的转角;
16、欠驱动手的位移向量为:
17、
18、其中,rm为欠驱动手的位移,l为机械臂的长度。
19、可选地,根据机械臂的位移向量和欠驱动手的位移向量确定伺服系统的动能和势能,包括:
20、根据机械臂的位移向量确定机械臂的动能
21、根据欠驱动手的位移向量确定欠驱动手的动能
22、根据机械臂的动能和欠驱动手的动能确定伺服系统的动能k=kl+km;
23、根据机械臂的位移向量和欠驱动手的位移向量确定伺服系统的势能
24、其中,ρ为机械臂的线密度,m为欠驱动手的质量,ei为机械臂的抗弯刚度,ks为关节的扭转刚度,θm为电机的转角。
25、可选地,根据伺服系统的动能和势能结合外界干扰确定伺服系统的动力学方程,包括:
26、根据stribeck摩擦模型将外界干扰表征为:
27、
28、其中,fc为库仑摩擦力矩;fs为起动转矩;ω为stribeck速度;σ为粘性摩擦系数;ε为一个指数因子,+为对应参数在方向上的值,-为对应参数在方向上的值;
29、根据伺服系统的动能k和势能h结合外界干扰tf确定伺服系统的动力学方程为:
30、
31、其中,tm为电机输出的驱动力矩,jm为电机的转动惯量,ts为作用于机械臂上的力矩,
32、可选地,基于rbf神经网络确定动力学方程中的不确定项,包括:
33、将rbf神经网络的输出值确定为动力学方程中的不确定项;
34、rbf神经网络为:
35、
36、其中,x为rbf神经网络输入的向量;e为误差矢量;q为位移矢量;为期望的位移矢量,其包括期望的旋转角度和期望的模态坐标;j为隐藏层中的第j个节点;ci为高斯函数中心向量;vi为归一化常数;hj为隐藏节点的输出;为高斯函数输出向量;hn为第n个隐藏节点的输出值;w为神经网络权重系数向量;为rbf神经网络的输出值。
37、可选地,方法还包括:
38、在系统控制律为的情况下,根据李雅普诺夫函数验证动力学模型系统的稳定性;
39、其中,kv为对角矩阵;ψ为一个鲁棒项,用于克服神经网络的近似误差;s为滑模函数;w为神经网络权重系数向量。
40、可选地,李雅普诺夫函数为:
41、
42、其中,tr表示矩阵的迹;γ为李雅普诺夫函数中的系数;d为质量矩阵。
43、可选地,在满足如下条件的情况下,动力学模型的稳定性能够通过系统控制律u保证:
44、
45、其中,kvmin为kv的最小值;s为滑模函数;w*为最优权重系数;为权重系数误差;k为rbf神经网络自适应律的系数;为w*的最大值。
46、第二方面,本发明提供一种基于rbf神经网络补偿的抑振系统,包括:位移向量确定模块,根据机械臂的横向变形表达式确定机械臂的位移向量和欠驱动手的位移向量;
47、动能和势能确定模块,根据机械臂的位移向量和欠驱动手的位移向量确定伺服系统的动能和势能;
48、动力学方程确定模块,根据伺服系统的动能和势能结合外界干扰确定伺服系统的动力学方程;
49、不确定项确定模块,基于rbf神经网络确定动力学方程中的不确定项;
50、补偿模块,根据所确定的不确定项对动力学方程进行补偿,以得到伺服系统的动力学模型。
51、(三)有益效果
52、本发明的有益效果是:本发明的一种基于rbf神经网络补偿的抑振方法,建立了考虑横向变形等多种非线性因素以及干扰力矩的动力学模型。借助rbf神经网络识别和补偿动力学方程中的不确定成分,提高了跟踪精度,抑制了变形波动,进而削弱颤振现象。
技术特征:
1.一种基于rbf神经网络补偿的抑振方法,其特征在于,用于设置有欠驱动手结构的空间柔性机械臂,所述方法包括:
2.根据权利要求1所述的基于rbf神经网络补偿的抑振方法,其特征在于,所述机械臂的横向变形表达式为:
3.根据权利要求2所述的基于rbf神经网络补偿的抑振方法,其特征在于,所述机械臂的位移向量为:
4.根据权利要求3所述的基于rbf神经网络补偿的抑振方法,其特征在于,所述根据机械臂的位移向量和欠驱动手的位移向量确定伺服系统的动能和势能,包括:
5.根据权利要求4所述的基于rbf神经网络补偿的抑振方法,其特征在于,所述根据伺服系统的动能和势能结合外界干扰确定伺服系统的动力学方程,包括:
6.根据权利要求5所述的基于rbf神经网络补偿的抑振方法,其特征在于,所述基于rbf神经网络确定动力学方程中的不确定项,包括:
7.根据权利要求1所述的基于rbf神经网络补偿的抑振方法,其特征在于,所述方法还包括:
8.根据权利要求7所述的基于rbf神经网络补偿的抑振方法,其特征在于,所述李雅普诺夫函数为:
9.根据权利要求8所述的基于rbf神经网络补偿的抑振方法,其特征在于,在满足如下条件的情况下,动力学模型的稳定性能够通过系统控制律u保证:
10.一种基于rbf神经网络补偿的抑振系统,其特征在于,包括:
技术总结
本发明涉及基于RBF神经网络补偿的抑振方法,用于设置有欠驱动手结构的空间柔性机械臂,该方法包括:根据机械臂的横向变形表达式确定机械臂的位移向量和欠驱动手的位移向量;根据机械臂的位移向量和欠驱动手的位移向量确定伺服系统的动能和势能;根据伺服系统的动能和势能结合外界干扰确定伺服系统的动力学方程;基于RBF神经网络确定动力学方程中的不确定项;根据所确定的不确定项对动力学方程进行补偿,以得到伺服系统的动力学模型。其有益效果是,借助RBF神经网络识别和补偿动力学方程中的不确定成分,提高了跟踪精度,抑制了变形波动,进而削弱颤振现象。
技术研发人员:李小彭,尚东阳,周赛男,王浩哲,刘佳琪,李正鼎,佟志强,李佳昊
受保护的技术使用者:东北大学
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!