一种用于测量大型构件的集群式智能机器人的制作方法
本发明属于机器人,特别涉及一种用于测量大型构件的集群式智能机器人。
背景技术:
1、集群机器人涉及大集群机器人的设计、建造和部署,它们能够相互协调并协同解决问题或者执行任务。集群机器人的灵感来源于自然自组织系统,例如社交昆虫,鱼类或鸟群,它们都是基于简单本地交互规则的涌现性群体行为。通常而言,集群机器人从这些自然系统的研究中提取工程原理,从而构建具有可比能力的多机器人系统。通过这种方式,集群机器人旨在构建比单个机器人更加鲁棒、更强容错和更高灵活的系统,并且能够更好地调整自身行为来适应环境变化。
2、集群式机器人可对大型构件进行测量,现有的集群式机器人在使用时,其位于高空飞行作业时,当其内部出现短路着火时,此时机器人会带着拍摄设备一起坠落,最终机器人及拍摄设备一同烧坏,导致在机器人无法拯救的情况下,会连带拍摄设备一同损坏。
3、因此,发明一种用于测量大型构件的集群式智能机器人来解决上述问题很有必要。
技术实现思路
1、针对上述问题,本发明提供了一种用于测量大型构件的集群式智能机器人,以解决上述背景技术中提出的问题。
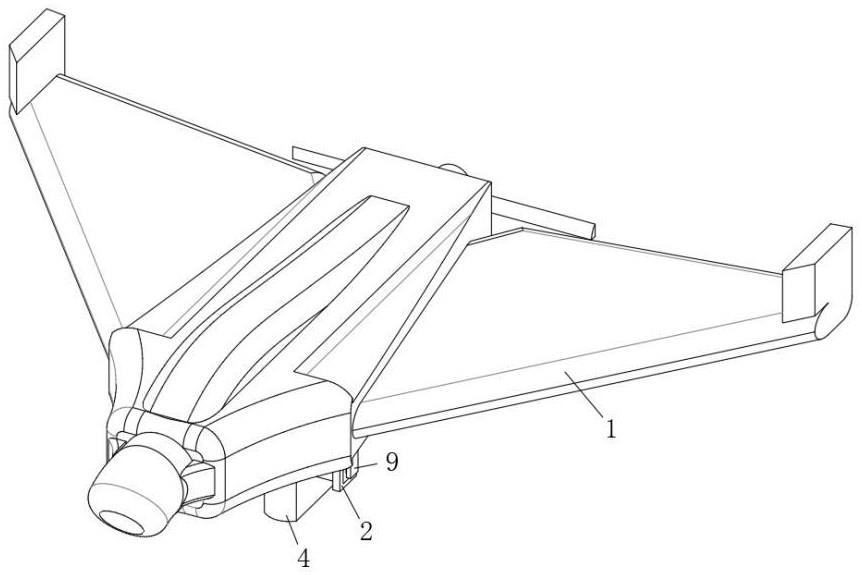
2、为实现上述目的,本发明提供如下技术方案:一种用于测量大型构件的集群式智能机器人,包括机器人,所述机器人的底部对称设置有u形架,所述机器人的底部开设有与u形架配合的滑槽,所述滑槽内设有用于固定u形架的固定结构,所述u形架的内部固定连接有连杆,所述连杆远离u形架的一端固定连接有防护罩,两个所述防护罩之间设有摄像机,所述摄像机的两侧均固定安装有矩形杆,所述连杆的内部开设有与矩形杆配合的矩形槽,所述矩形杆位于矩形槽内,所述矩形杆远离摄像机的一端固定连接有限位杆,所述限位杆的外部套设有第一弹簧,所述第一弹簧的两端分别与矩形杆及矩形槽的内壁固定连接,所述机器人的底部固定安装有与限位杆抵触的限位板,两个所述防护罩的顶部共同连接有降落伞。
3、进一步的,所述滑槽斜向设置,所述滑槽靠近防护罩的一侧的高度低于其远离防护罩的一侧的高度,所述固定结构具体设置为电磁铁,所述固定结构固定安装在滑槽远离防护罩的一侧内壁上,所述u形架材质为铁,所述u形架的顶部延伸至滑槽内与固定结构固定连接。
4、进一步的,所述防护罩的顶部对称开设有移动槽,所述移动槽的一侧与外界连通,所述移动槽内滑动设置有侧板,所述侧板的内侧通过转轴转动安装有收纳壳,所述收纳壳靠近降落伞的一侧开设有用于收纳降落伞的收纳口,所述降落伞收纳在收纳口内,所述移动槽远离侧板的一侧内壁固定安装有第二弹簧,所述防护罩的顶部设有用于对侧板进行定位的定位组件,所述防护罩的顶部固定安装有抬板,所述抬板位于收纳壳的下方将其抬升。
5、进一步的,所述定位组件包括固定连接在防护罩顶部的壳体,所述壳体的内部远离移动槽的一侧固定安装有矩形电磁铁,所述壳体的内部滑动设置有铁板,所述铁板远离矩形电磁铁的一侧固定安装有定位板,所述定位板延伸至壳体的外部与侧板抵触,其中一个所述防护罩靠近摄像机的一侧设置有用于控制矩形电磁铁通电的开关,所述移动槽的内壁设有橡胶垫。
6、进一步的,所述摄像机具体设置为可见光加红外线一体化集成相机,所述摄像机内置为其供电的电源,所述电源也为矩形电磁铁供电。
7、进一步的,所述收纳壳靠近摄像机的一侧设置有弧形面,所述弧形面斜向下设置。
8、进一步的,所述防护罩的外侧设置有警示灯,所述警示灯与开关配合。
9、进一步的,所述机器人具体设置为无人机。
10、本发明的技术效果和优点:
11、1、本发明可实现当机器人内部短路着火时,能通过防护罩将摄像头包裹随后弹出,从而使得摄像头远离机器人,随后通过降落伞可保证防护罩及摄像头缓缓的下落,从而实现对摄像头的保护,避免其由于机器人着火而被烧坏;
12、2、本发明可在防护罩合并对摄像头包裹及弹出的过程中,能实现对降落伞的抬升,使得防护罩不会对降落伞夹持,且可在弹出的过程中能实现降落伞远离机器人后才开启,使得不会出现机器人与降落伞的缠绕,保证降落伞的正常开启。
技术特征:
1.一种用于测量大型构件的集群式智能机器人,包括机器人(1),其特征在于:所述机器人(1)的底部对称设置有u形架(2),所述机器人(1)的底部开设有与u形架(2)配合的滑槽(11),所述滑槽(11)内设有用于固定u形架(2)的固定结构(12),所述u形架(2)的内部固定连接有连杆(3),所述连杆(3)远离u形架(2)的一端固定连接有防护罩(4),两个所述防护罩(4)之间设有摄像机(5),所述摄像机(5)的两侧均固定安装有矩形杆(6),所述连杆(3)的内部开设有与矩形杆(6)配合的矩形槽,所述矩形杆(6)位于矩形槽内,所述矩形杆(6)远离摄像机(5)的一端固定连接有限位杆(7),所述限位杆(7)的外部套设有第一弹簧(8),所述第一弹簧(8)的两端分别与矩形杆(6)及矩形槽的内壁固定连接,所述机器人(1)的底部固定安装有与限位杆(7)抵触的限位板(9),两个所述防护罩(4)的顶部共同连接有降落伞(10)。
2.根据权利要求1所述的用于测量大型构件的集群式智能机器人,其特征在于:所述滑槽(11)斜向设置,所述滑槽(11)靠近防护罩(4)的一侧的高度低于其远离防护罩(4)的一侧的高度,所述固定结构(12)具体设置为电磁铁,所述固定结构(12)固定安装在滑槽(11)远离防护罩(4)的一侧内壁上,所述u形架(2)材质为铁,所述u形架(2)的顶部延伸至滑槽(11)内与固定结构(12)固定连接。
3.根据权利要求2所述的用于测量大型构件的集群式智能机器人,其特征在于:所述防护罩(4)的顶部对称开设有移动槽(13),所述移动槽(13)的一侧与外界连通,所述移动槽(13)内滑动设置有侧板(14),所述侧板(14)的内侧通过转轴转动安装有收纳壳(15),所述收纳壳(15)靠近降落伞(10)的一侧开设有用于收纳降落伞(10)的收纳口,所述降落伞(10)收纳在收纳口内,所述移动槽(13)远离侧板(14)的一侧内壁固定安装有第二弹簧(16),所述防护罩(4)的顶部设有用于对侧板(14)进行定位的定位组件,所述防护罩(4)的顶部固定安装有抬板(22),所述抬板(22)位于收纳壳(15)的下方将其抬升。
4.根据权利要求3所述的用于测量大型构件的集群式智能机器人,其特征在于:所述定位组件包括固定连接在防护罩(4)顶部的壳体(17),所述壳体(17)的内部远离移动槽(13)的一侧固定安装有矩形电磁铁(18),所述壳体(17)的内部滑动设置有铁板(19),所述铁板(19)远离矩形电磁铁(18)的一侧固定安装有定位板(20),所述定位板(20)延伸至壳体(17)的外部与侧板(14)抵触,其中一个所述防护罩(4)靠近摄像机(5)的一侧设置有用于控制矩形电磁铁(18)通电的开关(21),所述移动槽(13)的内壁设有橡胶垫。
5.根据权利要求4所述的用于测量大型构件的集群式智能机器人,其特征在于:所述摄像机(5)具体设置为可见光加红外线一体化集成相机,所述摄像机(5)内置为其供电的电源,所述电源也为矩形电磁铁(18)供电。
6.根据权利要求5所述的用于测量大型构件的集群式智能机器人,其特征在于:所述收纳壳(15)靠近摄像机(5)的一侧设置有弧形面,所述弧形面斜向下设置。
7.根据权利要求6所述的用于测量大型构件的集群式智能机器人,其特征在于:所述防护罩(4)的外侧设置有警示灯(23),所述警示灯(23)与开关(21)配合。
8.根据权利要求7所述的用于测量大型构件的集群式智能机器人,其特征在于:所述机器人(1)具体设置为无人机。
技术总结
本发明涉及机器人技术领域,且公开了一种用于测量大型构件的集群式智能机器人,包括机器人,所述机器人的底部对称设置有U形架,所述机器人的底部开设有与U形架配合的滑槽。本发明可实现当机器人内部短路着火时,能通过防护罩将摄像头包裹随后弹出,从而使得摄像头远离机器人,随后通过降落伞可保证防护罩及摄像头缓缓的下落,从而实现对摄像头的保护,避免其由于机器人着火而被烧坏,且可在防护罩合并对摄像头包裹及弹出的过程中,能实现对降落伞的抬升,使得防护罩不会对降落伞夹持,且可在弹出的过程中能实现降落伞远离机器人后才开启,使得不会出现机器人与降落伞的缠绕,保证降落伞的正常开启。
技术研发人员:范生宏,范文杰
受保护的技术使用者:北京普达迪泰科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!