一种实现机器人交互的机器人语言系统的制作方法
本发明涉及机器人交互,尤其涉及一种实现机器人交互的机器人语言系统。
背景技术:
1、随着科技的快速发展,机器人已经广泛应用在许多领域,如制造业、服务业、医疗、教育等,在这些应用中,人机交互技术扮演了关键角色,其质量直接影响了机器人的工作效率和用户的满意度,然而,传统的机器人通常只能理解和执行预设的指令,对于自然语言的理解和对话管理能力相对较弱,这限制了它们的交互能力和应用范围。
2、另一方面,现有的机器人通常采用单一的模态进行交互,如只通过语音或者文字进行交互,这使得交互过程缺乏丰富性和灵活性,例如,只通过语音交互的机器人可能无法理解用户的面部表情和身体语言,这会使得交互过程缺乏情绪的传递和理解。
3、此外,虽然有一些机器人可以学习用户的行为和反馈,以改进其性能,但这种学习过程通常需要离线的数据收集和模型训练,无法实现真正的在线学习和自我优化。
4、因此,如何实现一种能够理解自然语言,进行多模态交互,具有在线学习能力的机器人语言系统,是当前研究的一个重要问题。
技术实现思路
1、基于上述目的,本发明提供了一种实现机器人交互的机器人语言系统。
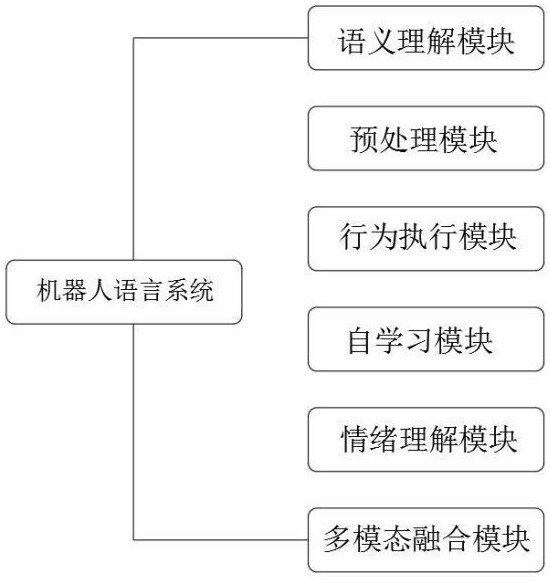
2、一种实现机器人交互的机器人语言系统,包括语义理解模块、对话管理模块、行为执行模块、自学习模块、情绪理解模块和多模态融合模块;
3、语义理解模块:用于对输入的语音或文字进行语义理解,并将理解结果输出给对话管理模块;
4、对话管理模块,用于根据语义理解模块的输出结果,结合当前的对话环境和机器人内部状态,决定机器人的下一步行为;
5、行为执行模块:根据对话管理模块的决策结果,控制机器人进行相应的动作或语音输出;
6、自学习模块:通过收集和分析机器人与用户的交互数据,持续优化语义理解模块、对话管理模块和行为执行模块的性能;
7、情绪理解模块:通过语音识别和视觉识别的方式理解用户的情绪,提供给对话管理模块作为输入,以实现个性化交互;
8、多模态融合模块:用于融合语音、文字、视觉多种模态的信息,提升语义理解。
9、进一步的,所述语义理解模块包括语音识别单元和自然语言理解单元,具体的,
10、语音识别单元:通过深度学习的语音识别模型,将输入的语音信号转化为文字,具体包括声学模型和语言模型两个部分,所述声学模型负责将音频信号转化为音素或其他语音单元的概率分布,语言模型则将这些音素或语音单元转化为实际的文本;
11、自然语言理解单元:用于对转化后的文字进行语义分析,该语义分析包括词性标注、句法分析和语义角色标注,以提取出文本中的关键信息。
12、进一步的,所述自然语言理解单元采用基于深度学习的自然语言处理模型,该自然语言处理模型为transformer模型,对输入的文字进行语义理解,transformer模型通过自注意力机制和位置编码来处理文本数据,其中,自注意力机制能够捕捉文本中的长距离依赖关系,位置编码则用于解决了模型对文本顺序的理解问题,所述transformer模型的自注意力机制的计算过程为:
13、若输入序列为x=[x1,x2,...,xn],每个xi∈r^d,d为词向量的维度,则self-attention的计算过程如下:
14、首先,将输入序列x通过线性变换得到query矩阵q,key矩阵k和value矩阵v,即:
15、q=xwq, k=xwk, v=xwv
16、其中,wq, wk, wv∈r^(d×d)是学习的参数
17、然后,计算q和k的点积,再除以sqrt(d),得到注意力得分矩阵:
18、score=qk^t/sqrt(d)
19、再通过softmax函数将注意力得分归一化为注意力权重:
20、a=softmax(score)
21、最后,计算加权和得到输出序列:
22、y=av。
23、进一步的,所述对话管理模块包括对话状态跟踪单元和对话策略决策单元,具体为;
24、对话状态跟踪单元:通过采用深度学习方法,该深度学习方法具体为长短期记忆网络(lstm),以实现对话状态的连续跟踪和更新,该对话状态跟踪单元单元能捕获对话中的时间依赖关系,并利用此来更新当前的对话状态;
25、对话策略决策单元:基于当前的对话状态和情境信息,决定机器人的下一步行为,该行为包括回答问题、提供建议或者询问更多信息,上述行为的选择将会根据与用户的交互效果进行自我调整和优化。
26、进一步的,所述长短期记忆网络(lstm)用于处理长序列数的梯度消失和梯度爆炸的问题,该长短期记忆网络的每个记忆单元包括输入门、遗忘门和输出门三个部分,这三个门的功能分别为控制信息的输入、保留和输出;所述长短期记忆网络的运算用以下公式表示:
27、遗忘门:
28、f_t = σ(w_f · [h_{t-1}, x_t] + b_f)
29、输入门:
30、i_t = σ(w_i · [h_{t-1}, x_t] + b_i)
31、输出门:
32、o_t = σ(w_o · [h_{t-1}, x_t] + b_o)
33、单元状态更新:
34、c_t = f_t * c_{t-1} + i_t * tanh(w_c · [h_{t-1}, x_t] + b_c)
35、隐藏状态更新:
36、h_t = o_t * tanh(c_t)
37、其中,σ是sigmoid函数,·表示向量或矩阵的点乘,[h_{t-1}, x_t]表示将上一时刻的隐藏状态h_{t-1}和当前输入x_t进行拼接,*表示元素间的乘法,tanh是双曲正切函数,w和b是模型学习的参数,其中,f_t, i_t, o_t分别是遗忘门、输入门和输出门在时刻t的激活值,c_t和h_t分别是时刻t的单元状态和隐藏状态。
38、进一步的,所述执行模块包括动作执行单元和语音合成单元;
39、所述动作执行单元:用于控制机器人进行相应的动作,具体地,动作执行单元接收对话策略决策单元的输出指令,将这些指令转换为机器人动作的具体参数,并通过控制机器人的驱动系统,实现这些动作的执行;
40、所述语音合成单元:用于将要输出的文字转化为语音,该转化过程包括文本分析、音素转换和语音合成步骤,所述文本分析用于理解文本的语法结构和语义内容;音素转换则将文本转化为音素序列;语音合成则用于将音素序列转化为播放的音频信号。
41、进一步的,所述动作执行单元控制机器人执行的动作包括移动、抓取物体和表达情绪。
42、进一步的,所述自学习模块包括数据收集单元和模型更新单元,该数据收集单元用于收集机器人与用户的交互数据,模型更新单元用于根据收集到的数据,对语义理解模块、对话管理模块和行为执行模块的模型进行更新和优化。
43、进一步的,所述情绪理解模块包括语音情绪识别单元、文本情绪识别单元和面部表情识别单元,上述单元能分别对语音、文字和面部表情进行情绪分析,情绪理解模块用于改进机器人的交互效果,使其能够对用户的情绪进行响应。
44、进一步的,所述多模态融合模块还包括接收语音、文字、面部表情和身体语言等多种类型的输入信息,并对上述信息进行特征提取和融合,输出的结果包括一个统一的语义表示和输入信息的决策结果。
45、本发明的有益效果:
46、本发明,通过引入语义理解模块和对话管理模块,使得机器人可以理解更复杂、更丰富的自然语言表达,而不仅仅是简单的指令,语义理解模块能够将用户的语音输入转化为文字,然后对这些文字进行深度的语义分析,理解用户的意图和需求,对话管理模块则能够根据理解的结果和当前的对话状态,决定机器人的下一步行为,这大大提高了机器人的交互灵活性和智能性,此外,通过采用深度学习的方法,机器人的语义理解和对话管理能力可以随着时间的推移而不断提升。
47、本发明,通过引入情绪理解模块和多模态融合模块,机器人不仅可以通过语音和文字进行交互,还可以理解和响应用户的面部表情、身体语言等非语言信息,情绪理解模块可以分析用户的语音、文字和面部表情,识别出用户的情绪,使得机器人可以对用户的情绪进行响应,提供更加个性化的交互体验,多模态融合模块则能够将来自不同模态的信息进行有效地融合,提高机器人的理解和决策精度,使得机器人可以更好地适应复杂的交互环境。
48、本发明,通过引入自学习模块,机器人可以通过分析与用户的交互数据,不断优化其语义理解、对话管理和行为执行的能力,数据收集单元负责收集机器人与用户的交互数据,而模型更新单元则根据这些数据,进行在线的模型更新和优化,这种自我学习和优化的能力,使得机器人可以适应不同的用户和环境,持续提高其交互质量和用户满意度。
- 还没有人留言评论。精彩留言会获得点赞!