用于臂架的调试方法、装置及存储介质与流程
本申请涉及工程机械,具体地涉及一种用于臂架的调试方法、装置及存储介质。
背景技术:
1、在机械设备的零部件调试过程中,通常采用检测液压系统的压力,来判断是否满足电磁阀最小电流时部件的运动速度。当判定条件不满足时,按照设定的步长加大开启电流,直至满足判定条件。然而,当液压系统的压力已经达到时,电磁阀可能已经开启。而电磁阀控制的执行机构却并未克服静摩擦力运动,导致标定的最小电流并不准确。而且设定步长很难选取,步长选取过大则标定速度快但标定精度不佳,步长选取过小则标定精度佳但标定速度过慢,难以兼顾效率与精度问题。
技术实现思路
1、本申请实施例的目的是提供一种用于臂架的调试方法,用以解决现有技术中通过液压系统的压力进行调试时调试效果不佳的技术问题。
2、为了实现上述目的,本申请第一方面提供一种用于臂架的调试方法,调试方法应用于臂架,调试方法包括:
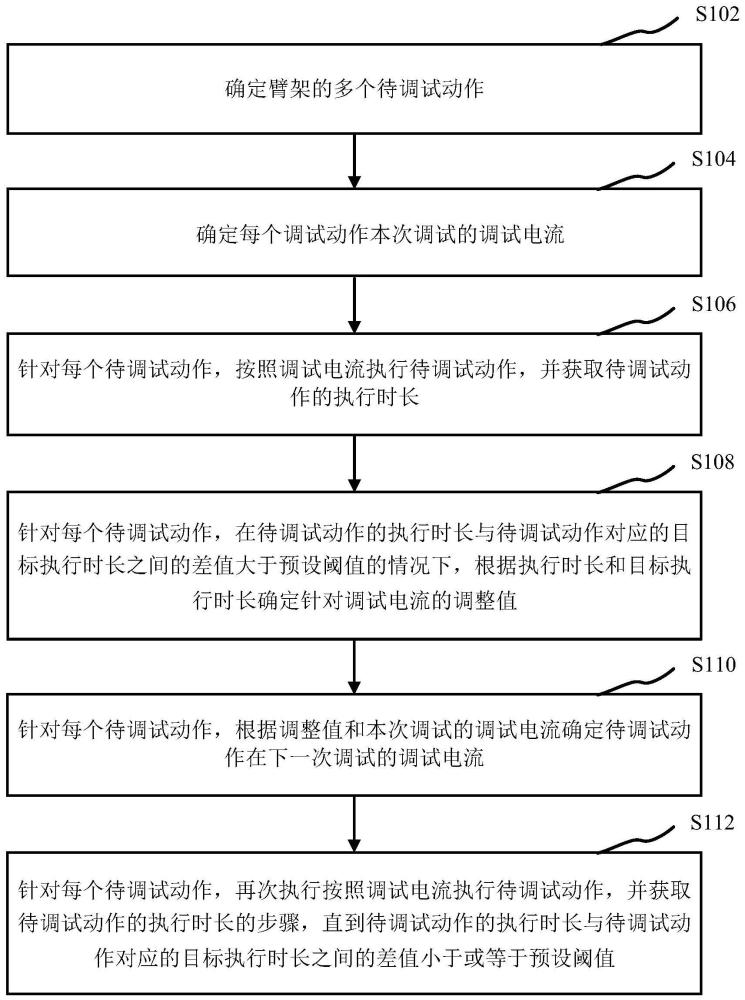
3、确定臂架的多个待调试动作;
4、确定每个调试动作本次调试的调试电流;
5、针对每个待调试动作,按照调试电流执行待调试动作,并获取待调试动作的执行时长;
6、针对每个待调试动作,在待调试动作的执行时长与待调试动作对应的目标执行时长之间的差值大于预设阈值的情况下,根据执行时长和目标执行时长确定针对调试电流的调整值;
7、针对每个待调试动作,根据调整值和本次调试的调试电流确定待调试动作在下一次调试的调试电流;
8、针对每个待调试动作,再次执行按照调试电流执行待调试动作,并获取待调试动作的执行时长的步骤,直到待调试动作的执行时长与待调试动作对应的目标执行时长之间的差值小于或等于预设阈值。
9、在本申请的实施例中,针对每个待调试动作,在待调试动作的执行时长与待调试动作对应的目标执行时长之间的差值大于预设阈值的情况下,根据执行时长和目标执行时长确定针对调试电流的调整值包括:获取每个待调试动作在第一次调试时的初次执行时长,以及每个待调试动作的时长取值区间,其中,目标执行时长处于时长取值区间内;针对每个待调试动作,在初次执行时长小于时长取值区间的下限值且本次的执行时长大于时长取值区间的上限值,或在初次执行时长大于时长取值区间的下限值,且本次的执行时长小于时长取值区间的上限值的情况下,确定针对调试电流的调试系数为第一数值;针对每个待调试动作,在初次执行时长处于时长取值区间,且本次的执行时长处于时长取值区间的上限值的情况下,确定针对调试电流的调试系数为第二数值;根据执行时长、目标执行时长和调试系数确定针对调试电流的调整值。
10、在本申请的实施例中,根据公式(1)确定调整值:
11、y=min{m,max(n,j×|t-t|)}×k
12、其中,y是指针对本次调试的调试电流的调整值,m是指调试电流对应的最大调试电流,n是指调试电流对应的最小调试电流,j是指调整值对应的最小调整值,t是指针对本次调试的执行时长,t是指目标执行时长,k是指调试系数。
13、在本申请的实施例中,多个待调试动作包括主臂变幅、主臂伸缩、转台回转、平台手动调平、飞臂变幅、平台摆动以及飞臂回转中的至少一者。
14、在本申请的实施例中,调试电流的类型包括最小电流、龟速电流、平台最大电流以及地面最大电流中的至少一者。
15、在本申请的实施例中,针对每个待调试动作设有调节调试电流的电磁阀,方法还包括:针对每个待调试动作,在执行时长与目标执行时长之间的差值小于或等于预设阈值的情况下,将执行时长对应的调试电流确定为待调试动作对应的电磁阀的目标电流。
16、本申请第二方面提供一种用于臂架的调试装置,包括:
17、存储器,被配置成存储指令;以及
18、处理器,被配置成从存储器调用指令以及在执行指令时能够实现根据上述的用于臂架的调试方法。
19、本申请第三方面提供一种工程机械,包括:
20、臂架;以及
21、上述的用于臂架的调试装置。
22、在本申请的实施例中,工程机械还包括:多个电磁阀,与臂架连接,每个电磁阀用于针对对应的待调试动作调节调试电流。
23、通过上述技术方案,确定臂架的多个待调试动作;确定每个调试动作本次调试的调试电流;针对每个待调试动作,按照调试电流执行待调试动作,并获取待调试动作的执行时长;针对每个待调试动作,在待调试动作的执行时长与待调试动作对应的目标执行时长之间的差值大于预设阈值的情况下,根据执行时长和目标执行时长确定针对调试电流的调整值;针对每个待调试动作,根据调整值和本次调试的调试电流确定待调试动作在下一次调试的调试电流;针对每个待调试动作,再次执行按照调试电流执行待调试动作,并获取待调试动作的执行时长的步骤,直到待调试动作的执行时长与待调试动作对应的目标执行时长之间的差值小于或等于预设阈值。可有效克服比例电磁阀的非线性、时变、电磁滞环、温度漂移、机械磨损等复杂特性,提高确定目标调试电流的精度和速度。且标定过程完全自动化,可以节省人工和时间成本。
24、本申请实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种用于臂架的调试方法,其特征在于,所述调试方法应用于臂架,所述调试方法包括:
2.根据权利要求1所述的用于臂架的调试方法,其特征在于,所述针对每个待调试动作,在所述待调试动作的执行时长与所述待调试动作对应的目标执行时长之间的差值大于预设阈值的情况下,根据所述执行时长和所述目标执行时长确定针对调试电流的调整值包括:
3.根据权利要求2所述的用于臂架的调试方法,其特征在于,根据公式(1)确定所述调整值:
4.根据权利要求1所述的方法,其特征在于,所述多个待调试动作包括主臂变幅、主臂伸缩、转台回转、平台手动调平、飞臂变幅、平台摆动以及飞臂回转中的至少一者。
5.根据权利要求1所述的用于臂架的调试方法,其特征在于,所述调试电流的类型包括最小电流、龟速电流、平台最大电流以及地面最大电流中的至少一者。
6.根据权利要求1所述的用于臂架的调试方法,其特征在于,针对每个待调试动作设有调节调试电流的电磁阀,所述方法还包括:
7.一种用于臂架的调试装置,其特征在于,包括:
8.一种工程机械,其特征在于,包括:
9.根据权利要求8所述的工程机械,其特征在于,还包括:
10.一种机器可读存储介质,其特征在于,该机器可读存储介质上存储有指令,该指令用于使得机器执行根据权利要求1至7中任一项所述的用于臂架的调试的方法。
技术总结
本申请公开了一种用于臂架的调试方法、装置及存储介质,调试方法包括:确定臂架的多个待调试动作;确定每个调试动作本次调试的调试电流,按照调试电流执行待调试动作,并获取待调试动作的执行时长。在执行时长与目标执行时长之间的差值大于预设阈值的情况下,根据执行时长和目标执行时长确定针对调试电流的调整值。根据调整值和本次调试的调试电流确定待调试动作在下一次调试的调试电流,再次执行按照调试电流执行待调试动作,并获取待调试动作的执行时长的步骤,直到执行时长与目标执行时长之间的差值小于或等于预设阈值。可有效克服比例电磁阀的复杂特性,提高确定目标调试电流的精度和速度。且标定过程完全自动化,可以节省人工和时间成本。
技术研发人员:吴继发,虢彦,段湘艺
受保护的技术使用者:中科云谷科技有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!