人体安全边界提取方法及机器人路径规划方法与流程
本发明涉及图像处理,尤其涉及一种人体安全边界提取方法及机器人路径规划方法。
背景技术:
1、随着计算机技术与机器人相关科学技术的进步,机器人开始越来越多的应用于医疗手术中,手术导航系统主要原理是将术前的影像空间坐标系、导航坐标系和机械坐标系进行配准后,医生在术前影像中规划穿刺通道,然后将该穿刺通道的位姿根据配准关系转换到机械臂坐标系下,在导航设备的引导下驱动机械臂达到预定位置执行穿刺手术,从而提高穿刺的精准度。然而手术中也经常出现,因为机械臂规划路径不合理,导致机器臂与人体发生碰撞的情况。避免出现此种情况的有效条件,需要让机械臂系统知道人体的安全边界的位置。
技术实现思路
1、发明目的:针对上述不足,本发明提出一种人体安全边界提取方法及机器人路径规划方法,可以有效防止机械臂与人体发生碰撞。
2、技术方案:
3、人体安全边界提取方法,包括:
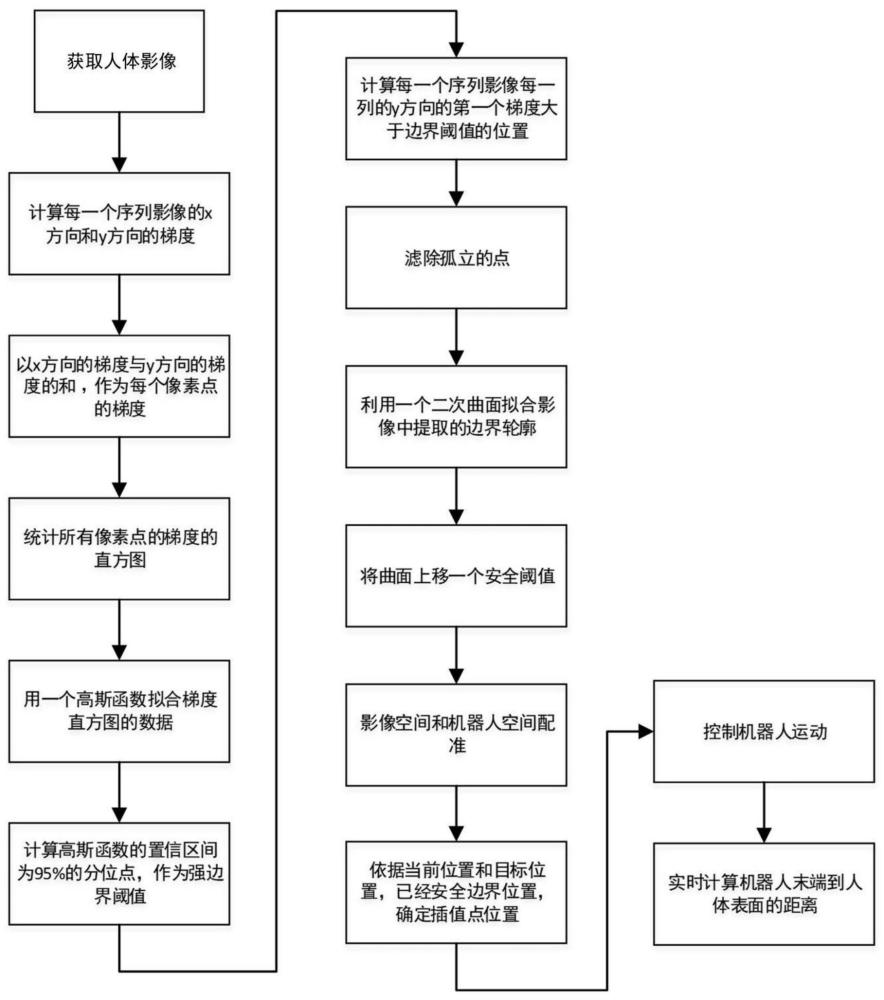
4、(1)获取人体影像,计算其中各序列影像的每个像素点的梯度,选取其中梯度大于设定阈值的像素点作为各序列影像的边缘点;
5、(2)根据步骤(1)得到的各序列影像的边缘点拟合二次曲面,得到人体轮廓曲面;
6、(3)将人体轮廓曲面在人体前后方向上沿远离人体的方向平移设定距离,得到人体安全边界。
7、具体地,所述设定阈值具体为:所述各序列影像中各像素点的梯度分布满足高斯分布,选取其中梯度大于所述高斯分布的设定置信水平对应的置信区间上限的像素点作为各序列影像的边缘点。
8、更具体地,所述设定置信水平为95%置信水平。
9、具体地,在步骤(1)得到各序列影像的边缘点后,还包括剔除各序列影像的边缘点中的伪点得到各序列影像对应的人体轮廓点,进而在所述步骤(2)中,以各序列影像对应的人体轮廓点拟合二次曲面,得到人体轮廓曲面。
10、更具体地,所述剔除各序列影像的边缘点中的伪点采用如下方法中的至少一种:
11、1)遍历判断s1得到的边缘点的邻域点中是否存在至少第一定值个点的梯度大于所述设定阈值,若是,则认为该点为边缘点;否则,认为该点为伪点,将其剔除;
12、2)分别对各序列影像的边缘点拟合二次曲线,并对该二次曲线进行二次求导,得到对应各边缘点的常数,筛选其中对应常数偏离所有常数的平均值设定程度的点作为伪点,将其剔除。
13、更进一步地,采用所述两种方法分别剔除各序列影像的边缘点中的伪点,并相互进行验证。
14、具体地,所述步骤(1)中,计算其中各序列影像的每个像素点的梯度,具体为:
15、通过对人体影像的各序列影像中每个像素点沿x、y方向进行sobel滤波得到每个像素点沿x、y方向的梯度gx、gy,由此计算得到每个像素点的梯度g=gx+gy。
16、具体地,所述s2中,根据步骤(1)得到的各序列影像的边缘点拟合二次曲面采用最小二乘法。
17、更具体地,所述拟合的二次曲面方程为:
18、y(x,z)=ax2+bz2+cxz+dx+ez+f
19、其中,(x,y,z)为人体边缘点的坐标;
20、构建所有人体边缘点的y坐标值的列向量y,设定参数矩阵θ=(a,b,c,d,e),所有轮廓点的x、z坐标值构成样本矩阵x={pi=(xi2,zi2,xizi,xi,zi,1)},i∈[0,n],则y=θt×x;
21、计算某一人体边缘点的yi坐标值与前述二次曲面方程得到的对应值y(xi,zi)之间的差值平方,进而对所有人体边缘点对应的差值平方进行求和,作为目标函数值,具体如下:
22、
23、其中,n为所有人体边缘点的数量;
24、根据前述将其转换为矩阵表示:
25、
26、求得:
27、θ=(a,b,c,d,e,f)=(xtx)-1xty
28、即得到拟合的二次曲面中的参数,进而得到二次曲面。
29、本发明还提供一种机器人路径规划方法,包括:
30、s1、采用前述的人体安全边界提取方法得到人体安全边界;
31、s2、根据s1得到的人体安全边界规划机器人运动路径的插值点;
32、s3、根据s2确定的机器人运动路径的插值点控制机器人运动。
33、具体地,所述s2中,根据人体安全边界规划机器人运动路径的插值点,具体为:
34、分别获取机器人末端工具的当前位姿和目标位姿,根据机器人与影像之间的变换关系变换得到影像中机器人末端工具的当前位姿和目标位姿,进而计算机器人运动路径的插值点。
35、更具体地,所述计算机器人运动路径的插值点具体为:
36、分别机器人末端工具的当前位置和目标位置在所述人体安全边界上的投影,得到所述机器人运动路径的第一、第二插值点,所述机器人末端工具在第一、第二插值点的姿态分别与机器人末端工具的当前姿态和目标姿态一致;
37、根据所述机器人末端工具的当前位置和目标位置的中点在所述人体安全边界上的投影,得到所述机器人运动路径的中间插值点;
38、根据所述机器人末端工具的当前姿态和目标姿态计算得到中间插值点的对应姿态。
39、更进一步地,所述计算中间插值点的对应姿态具体为:
40、将机器人末端工具的当前姿态和目标姿态分别转换为四元数表示q1和q2,则通过正规化线程插值得到中间插值点t0对应的姿态的四元数q0表示:
41、
42、其中,t0、t1、t2分别为机器人路径的中间插值点、第一插值点和第二插值点的位置坐标。
43、更进一步地,还包括s4,在机器人运动过程中,实时计算机器人末端工具与所述人体轮廓曲面之间的最短距离,若该距离小于设定阈值,控制机器人停止运动。
44、有益效果:本发明选取的人体轮廓点非常迅速准确,获取的人体安全边界始终距离人体轮廓有一定距离,进一步保护患者安全,有效避免机器臂与人体发生碰撞的情况。
技术特征:
1.人体安全边界提取方法,其特征在于,包括:
2.根据权利要求1所述的人体安全边界提取方法,其特征在于,所述设定阈值具体为:所述各序列影像中各像素点的梯度分布满足高斯分布,选取其中梯度大于所述高斯分布的设定置信水平对应的置信区间上限的像素点作为各序列影像的边缘点。
3.根据权利要求2所述的人体安全边界提取方法,其特征在于,所述设定置信水平为95%置信水平。
4.根据权利要求1所述的人体安全边界提取方法,其特征在于,在步骤(1)得到各序列影像的边缘点后,还包括剔除各序列影像的边缘点中的伪点得到各序列影像对应的人体轮廓点,进而在所述步骤(2)中,以各序列影像对应的人体轮廓点拟合二次曲面,得到人体轮廓曲面。
5.根据权利要求4所述的人体安全边界提取方法,其特征在于,所述剔除各序列影像的边缘点中的伪点采用如下方法中的至少一种:
6.根据权利要求5所述的人体安全边界提取方法,其特征在于,采用所述两种方法分别剔除各序列影像的边缘点中的伪点,并相互进行验证。
7.根据权利要求1所述的人体安全边界提取方法,其特征在于,所述步骤(1)中,计算其中各序列影像的每个像素点的梯度,具体为:
8.根据权利要求1所述的人体安全边界提取方法,其特征在于,所述s2中,根据步骤(1)得到的各序列影像的边缘点拟合二次曲面采用最小二乘法。
9.根据权利要求8所述的人体安全边界提取方法,其特征在于,所述拟合的二次曲面方程为:
10.一种机器人路径规划方法,其特征在于,包括:
11.根据权利要求10所述的机器人路径规划方法,其特征在于,所述s2中,根据人体安全边界规划机器人运动路径的插值点,具体为:
12.根据权利要求11所述的机器人路径规划方法,其特征在于,所述计算机器人运动路径的插值点具体为:
13.根据权利要求12所述的机器人路径规划方法,其特征在于,所述计算中间插值点的对应姿态具体为:
14.根据权利要求10所述的机器人路径规划方法,其特征在于,还包括s4,在机器人运动过程中,实时计算机器人末端工具与所述人体轮廓曲面之间的最短距离,若该距离小于设定阈值,控制机器人停止运动。
技术总结
本发明公开了一种人体安全边界提取方法及机器人路径规划方法,包括:(1)获取人体影像,计算其中各序列影像的每个像素点的梯度,选取其中梯度大于设定阈值的像素点作为各序列影像的边缘点;(2)根据步骤(1)得到的各序列影像的边缘点拟合二次曲面,得到人体轮廓曲面;(3)将人体轮廓曲面在人体前后方向上沿远离人体的方向平移设定距离,得到人体安全边界。本发明选取的人体轮廓点非常迅速准确,获取的人体安全边界始终距离人体轮廓有一定距离,进一步保护患者安全,有效避免机器臂与人体发生碰撞的情况。
技术研发人员:王英杰
受保护的技术使用者:佗道医疗科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!