一种废旧锂电池的外壳切割控制方法及相关装置与流程
本发明主要涉及锂电池拆解,具体涉及一种废旧锂电池的外壳切割控制方法及相关装置。
背景技术:
1、方形锂电池是常用的锂电池之一,广泛应用在新能源汽车的能源装置内,而方形锂电池主要包括有外壳、盖板、绝缘板、电芯部件,在进行废旧锂电池的回收时,需要对外壳进行切割分解。
2、目前的废旧锂电池的拆解回收过程中,通过切割装置对废旧锂电池的外壳进行切割拆解,由于经流水线输送的各个废旧锂电池的位姿不一致,需要人工手动将废旧锂电池装夹在切割装置中,或者通过机械手将废旧锂电池放置在切割装置的装夹位置上,对于不同尺寸规格的废旧锂电池,需要调整切割装置的切割参数,这种切割处理方式需要对废旧锂电池进行多次夹取搬运和定位夹紧,影响废旧锂电池外壳的切割效率,而且切割装置频繁调整切割参数,容易出现切割失误的情况,影响废旧锂电池的外壳切割可靠性。
技术实现思路
1、本发明的目的在于克服现有技术的不足,本发明提供了一种废旧锂电池的外壳切割控制方法及相关装置,根据废旧锂电池的实际位置构建三维空间坐标系,基于空间模型确定铝壳的切割位置,从而提高废旧锂电池外壳切割的效率和可靠性。
2、本发明提供了一种废旧锂电池的外壳切割控制方法,所述控制方法包括:
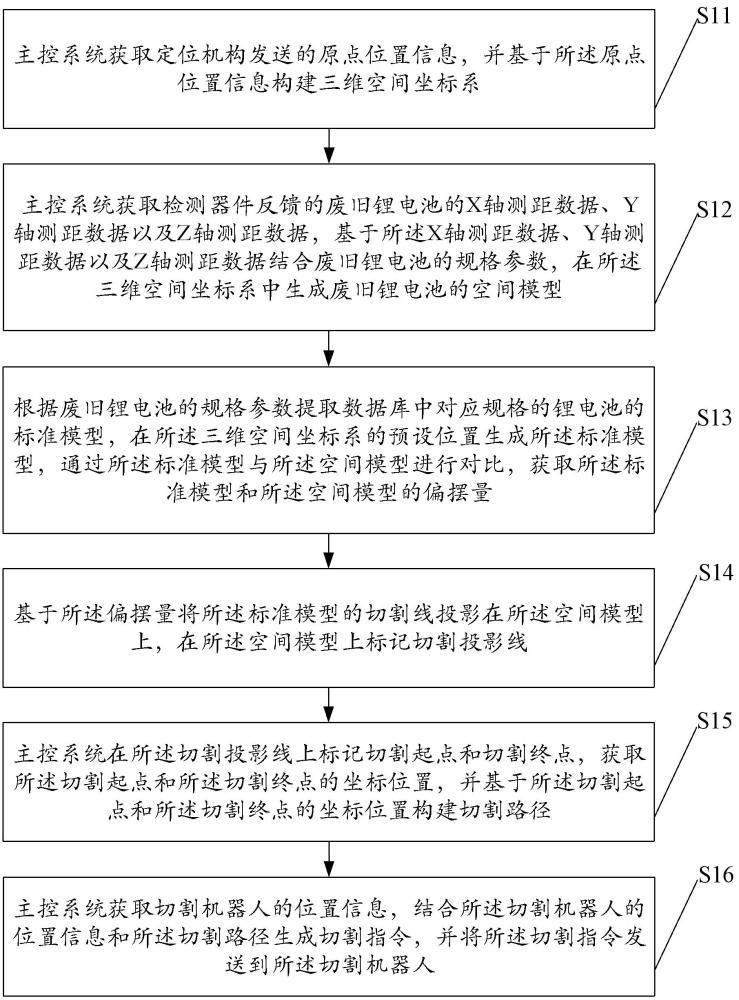
3、主控系统获取定位机构发送的原点位置信息,并基于所述原点位置信息构建三维空间坐标系;
4、主控系统获取检测器件反馈的废旧锂电池的x轴测距数据、y轴测距数据以及z轴测距数据,基于所述x轴测距数据、y轴测距数据以及z轴测距数据结合废旧锂电池的规格参数,在所述三维空间坐标系中生成废旧锂电池的空间模型;
5、根据废旧锂电池的规格参数提取数据库中对应规格的锂电池的标准模型,在所述三维空间坐标系的预设位置生成所述标准模型,通过所述标准模型与所述空间模型进行对比,获取所述标准模型和所述空间模型的偏摆量;
6、基于所述偏摆量将所述标准模型的切割线投影在所述空间模型上,在所述空间模型上标记切割投影线;
7、主控系统在所述切割投影线上标记切割起点和切割终点,获取所述切割起点和所述切割终点的坐标位置,并基于所述切割起点和所述切割终点的坐标位置构建切割路径;
8、主控系统获取切割机器人的位置信息,结合所述切割机器人的位置信息和所述切割路径生成切割指令,并将所述切割指令发送到所述切割机器人。
9、进一步的,所述主控系统获取定位机构发送的原点位置信息,并基于所述原点位置信息构建三维空间坐标系包括:
10、主控系统接收定位机构的活动端发送的捕捉位置信息,并提取所述定位机构的固定端发送的原点位置信息;
11、基于所述原点位置信息和所述捕捉位置信息计算定位机构活动端位置和固定端位置之间的调整距离;
12、设定所述原点位置信息为坐标原点构建三维空间坐标系,基于所述调整距离获取所述捕捉位置的坐标点,设定所述坐标点为废旧锂电池的建模位置。
13、进一步的,所述主控系统获取检测器件反馈的废旧锂电池的x轴测距数据、y轴测距数据以及z轴测距数据,基于所述x轴测距数据、y轴测距数据以及z轴测距数据结合废旧锂电池的规格参数,在所述三维空间坐标系中生成废旧锂电池的空间模型包括:
14、主控系统根据检测器件反馈的检测信息,提取出所述废旧锂电池的x轴测距数据、y轴测距数据以及z轴测距数据;
15、基于所述x轴测距数据、y轴测距数据以及z轴测距数据在所述三维空间坐标系中投影所述废旧锂电池的初始轮廓模型;
16、结合所述废旧锂电池的规格参数,对所述初始轮廓模型进行补全,得到所述废旧锂电池的空间模型。
17、进一步的,所述基于x轴测距数据、y轴测距数据以及z轴测距数据在所述三维空间坐标系中投影所述废旧锂电池的初始轮廓模型包括:
18、主控系统获取检测器件中每一个检测元件与所述定位机构之间的距离信息;
19、基于所述距离信息计算每个检测元件在所述三维空间坐标系中的坐标点,并基于所述坐标点在所述三维空间坐标系中标定检测元件的位置;
20、根据所述x轴测距数据、y轴测距数据以及z轴测距数据在三维空间坐标系中显示检测元件的测距路径,基于所述测距路径形成所述废旧锂电池的初始轮廓模型。
21、进一步的,所述根据废旧锂电池的规格参数提取数据库中对应规格的锂电池的标准模型,在所述三维空间坐标系的预设位置生成所述标准模型,通过所述标准模型与所述空间模型进行对比,获取所述标准模型和所述空间模型的偏摆量包括:
22、主控系统查询所述废旧锂电池的规格参数,基于所述废旧锂电池的规格参数在数据库中提取对应规格参数的锂电池的标准模型;
23、在所述三维空间坐标系的预设位置构建按预设位姿状态放置所述标准模型;
24、提取所述标准模型上的主要特征点坐标数据,得到对比坐标数据;
25、在所述空间模型提取对应特征点坐标数据,得到转换坐标数据;
26、基于所述对比坐标数据和转换坐标数据进行分析,得到所述标准模型和空间模型的偏摆量。
27、进一步的,所述基于偏摆量将所述标准模型的切割线投影在所述空间模型上,在所述空间模型上标记切割投影线包括:
28、根据所述偏摆量拟定所述标准模型与所述空间模型之间的投影转变路径;
29、提取所述标准模型的外壳与盖板的相接位置路径,并将所述相接位置路径设定为切割线;
30、在所述切割线上随机抽取坐标点,并将所述坐标点沿所述投影转变路径在所述空间模型上标记对应的投影坐标点,基于所述投影坐标点连线获取所述空间模型的切割投影线。
31、进一步的,所述主控系统获取切割机器人的位置信息,结合所述切割机器人的位置信息和所述切割路径生成切割指令,并将所述切割指令发送到所述切割机器人包括:
32、主控系统获取切割机器人反馈的位置信息,基于所述位置信息在所述三维空间坐标系中标记动作起点;
33、获取所述动作起点与所述切割路径的切割起点之间的坐标关系,构建所述动作起点和所述切割起点之间的运动路径;
34、基于所述运动路径和所述切割路径结合,生成所述切割指令。
35、本发明还提供了一种废旧锂电池的外壳切割控制装置,所述控制装置包括:
36、坐标系构建模块:用于主控系统获取定位机构发送的原点位置信息,并基于所述原点位置信息构建三维空间坐标系;
37、模型构建模块:用于主控系统获取检测器件反馈的废旧锂电池的x轴测距数据、y轴测距数据以及z轴测距数据,基于所述x轴测距数据、y轴测距数据以及z轴测距数据结合废旧锂电池的规格参数,在所述三维空间坐标系中生成废旧锂电池的空间模型;
38、偏摆计算模块:用于根据废旧锂电池的规格参数提取数据库中对应规格的锂电池的标准模型,在所述三维空间坐标系的预设位置生成所述标准模型,通过所述标准模型与所述空间模型进行对比,获取所述标准模型和所述空间模型的偏摆量;
39、标记模块:用于基于所述偏摆量将所述标准模型的切割线投影在所述空间模型上,在所述空间模型上标记切割投影线;
40、路径规划模块:用于主控系统在所述切割投影线上标记切割起点和切割终点,获取所述切割起点和所述切割终点的坐标位置,并基于所述切割起点和所述切割终点的坐标位置构建切割路径;
41、切割控制模块:用于主控系统获取切割机器人的位置信息,结合所述切割机器人的位置信息和所述切割路径生成切割指令,并将所述切割指令发送到所述切割机器人。
42、另外,本发明还提供了一种服务器,包括处理器和存储器,所述处理器运行存储于所述存储器中的计算机程序或代码,实现所述废旧锂电池的外壳切割控制方法。
43、另外,本发明还提供了一种计算机可读存储介质,用于存储计算机程序或代码,其特征在于,当所述计算机程序或代码被处理器执行时,实现所述废旧锂电池的外壳切割控制方法。
44、本发明提供了一种废旧锂电池的外壳切割控制方法及相关装置,根据废旧锂电池的实际位置构建三维空间坐标系,在三维空间坐标系中构建的废旧锂电池的空间模型,通过空间模型反映废旧锂电池的实际位姿状态,并通过标准模型结合空间模型确定铝壳的切割位置,通过对检测数据处理建模生成切割指令,配合切割机器人实现废旧锂电池的快速定位和切割,从而提高废旧锂电池外壳切割的效率和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!