一种欠驱动弹复性模块化机器人之间的连接结构
本技术涉及机器人领域,更具体地说,是涉及一种欠驱动弹复性模块化机器人。
背景技术:
1、弹复性是指系统部分受损后仍能恢复其原功能的特性,模块化机器人是由标准的相互独立的制造模块组成,每个模块有驱动部分、动力源等,不同的模块组合在一起,由一个信息的控制系统控制,构成具有特殊功能的复合型机器人,具有弹复性的模块化机器人则被称作弹复性模块化机器人,而由多个弹复性模块化机器人组合而成的则为弹复性模块化复合型机器人。
2、其中,现有的弹复性模块化复合型机器人主要为全驱动复合机器人(全驱动机器人的执行器的数目等于其自由度数目),然而,出于提高系统设计的集成性、紧凑性和降低成本、更出于简化后续运动控制的考虑,现有会更偏向于减少执行器的数量,进而形成了执行器的数目小于其自由度的欠驱动复合型机器人。因此,欠驱动弹复性模块化复合型机器人一般具有主动模块和被动模块,并且主动模块能够连接并带动被动模块运动,可以理解的是,主动模块是能够单独驱动的,被动模块是无法单独驱动的。
3、然而,现有的主动模块和被动模块是固定连接的,当存在欠驱动弹复性模块化复合型机器人的某一被动模块损坏时,不易解除对主动模块与被动模块的固定连接,从而导致欠驱动弹复性模块化复合型机器人无法自主对被动模块进行更换。
4、因此,现有技术还有待于改进。
技术实现思路
1、本技术的目的在于提供一种欠驱动弹复性模块化机器人之间的连接结构,以解决现有当存在欠驱动弹复性模块化复合型机器人的某一被动模块损坏时,不易解除对主动模块与被动模块的固定连接,从而导致欠驱动弹复性模块化复合型机器人无法自主对被动模块进行更换的问题。
2、为实现上述目的,本技术第一方面实施例采用的技术方案是:
3、一种欠驱动弹复性模块化机器人之间的连接结构,包括:
4、阳极接头,所述阳极接头的周侧上设置有至少两个凸起;
5、阴极接头,所述阴极接头包括由外到内依次设置的连接壳体、自由转动层和锁紧层;
6、所述连接壳体靠近所述自由转动层的一侧上贯穿开设有与所述凸起相匹配的第一槽口,所述连接壳体靠近所述锁紧层的一侧上贯穿开设有与所述凸起相匹配的第二槽口,所述锁紧层上开设有与所述凸起相匹配的锁紧槽,所述锁紧槽与所述第二槽口错开设置。
7、根据以上所述的欠驱动弹复性模块化机器人之间的连接结构,所述第一槽口与所述第二槽口并列且对齐设置。
8、根据以上所述的欠驱动弹复性模块化机器人之间的连接结构,所述自由转动层开设有槽轨道,所述凸起的厚度尺寸小于所述槽轨道的深度尺寸。
9、根据以上所述的欠驱动弹复性模块化机器人之间的连接结构,所述槽轨道的深度尺寸比所述凸起的厚度尺寸大3-5cm。
10、根据以上所述的欠驱动弹复性模块化机器人之间的连接结构,所述锁紧槽背离所述槽轨道的一侧的开口与所述第二槽口背离所述槽轨道的开口齐平。
11、根据以上所述的欠驱动弹复性模块化机器人之间的连接结构,所述凸起为扇形体凸起。
12、本技术第二方面实施例采用的技术方案是:
13、一种欠驱动弹复性模块化机器人,包括:
14、模块壳体;
15、至少两个阳极接头,两个所述阳极接头设置于所述模块壳体上;
16、至少两个阴极接头,两个所述阴极接头设置于所述模块壳体上,并与所述阳极接头错开设置;
17、至少两个第一驱动单元,所述第一驱动单元与所述阳极接头一一对应,所述第一驱动单元的驱动端与所述阳极接头连接,并用于驱动所述阳极接头轴向移动;
18、至少两个第二驱动单元,所述第二驱动单元与所述阳极接头一一对应,所述第二驱动单元的驱动端与所述阳极接头连接,并用于驱动所述阳极接头转动;
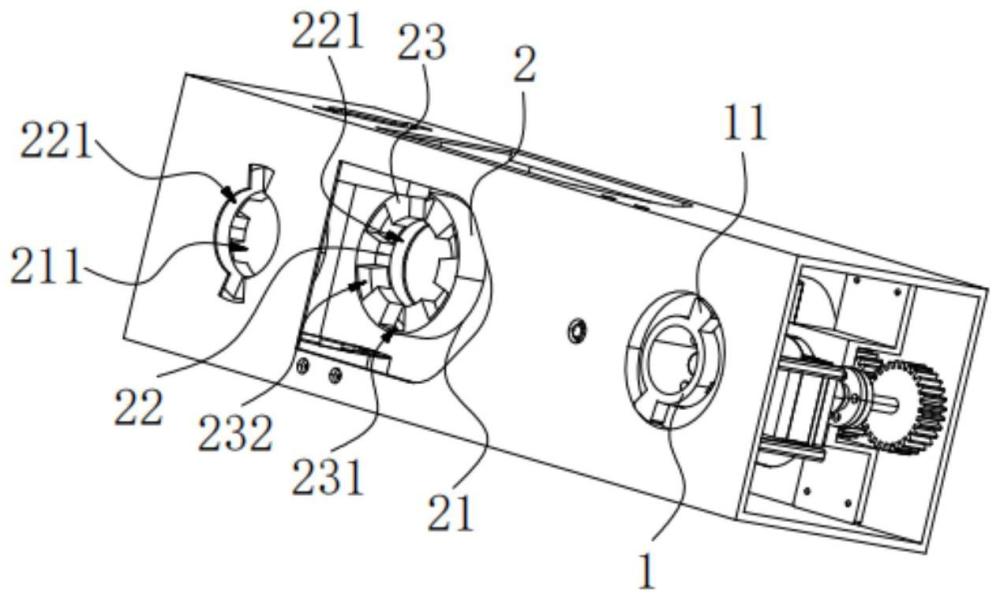
19、其中,所述阳极接头周侧上设置有至少两个凸起;
20、所述阴极接头包括由外到内依次设置的连接壳体、自由转动层和锁紧层;
21、所述连接壳体设置于所述模块壳体上,所述连接壳体靠近所述自由转动层的一侧上贯穿开设有与所述凸起相匹配的第一槽口,所述连接壳体靠近所述锁紧层的一侧上贯穿开设有与所述凸起相匹配的第二槽口,所述锁紧层上开设有与所述凸起相匹配的锁紧槽,所述锁紧槽与所述第二槽口错开设置。
22、根据以上所述的欠驱动弹复性模块化机器人,所述欠驱动弹复性模块化机器人还包括控制模块、检测模块、驱动模块和电源模块,所述控制模块、所述检测模块、所述驱动模块和所述电源模块均设置于所述模块壳体上,所述控制模块分别与所述检测模块、所述驱动模块和所述电源模块连接,所述驱动模块分别与所述第一驱动单元和所述第二驱动单元连接。
23、根据以上所述的欠驱动弹复性模块化机器人,所述第一驱动单元包括第一舵机,所述第二驱动单元包括第二舵机。
24、本技术第三方面实施例采用的技术方案是:
25、一种弹复性模块化复合型机器人,包括多个如上所述的欠驱动弹复性模块化机器人,其中,两个相邻的所述欠驱动弹复性模块化机器人之间的连接是通过其中一个欠驱动弹复性模块化机器人的阳极接头与另一个欠驱动弹复性模块化机器人的阴极接头连接的。
26、本技术提供的一种欠驱动弹复性模块化机器人之间的连接结构的有益效果至少在于:本技术通过沿轴向向内移动所述阳极接头,使所述凸起穿过所述第一槽口后,便能进入并转动设置于所述自由转动层内,所述阳极接头通过所述凸起与所述阴极接头转动连接,实现第一欠驱动弹复性模块化机器人与第二欠驱动弹复性模块化机器人的转动连接,通过将所述自由转动层内的凸起转动至对位于所述第二槽口处后,继续沿轴向向内移动所述阳极接头,直至所述凸起穿出第二槽口后,继续转动所述阳极接头,并使所述凸起对位于所述锁紧槽处,然后沿轴向向外移动所述阳极接头,直至所述凸起锁紧于所述锁紧槽内,所述阳极接头通过所述凸起与所述阴极接头固定连接,实现第一欠驱动弹复性模块化机器人和第二欠驱动弹复性模块化机器人之间由转动连接切换为固定连接,沿轴向向内移动所述凸起,直至将所述凸起移出所述锁紧槽,然后将所述凸起转动至将其对位于所述第二槽口处后,沿轴向向外移动所述阳极接头,直至所述凸起位于所述自由转动层内,以将所述阳极接头与所述阴极接头之间的固定连接切换成转动连接,实现第一欠驱动弹复性模块化机器人和第二欠驱动弹复性模块化机器人之间由固定连接切换为转动连接,将所述自由转动层内的凸起转动至对位于所述第一槽口处后,沿轴向向外移动所述阳极接头,直至所述凸起穿出第一槽口后,所述阳极接头与所述阴极接头无连接,进而实现第一欠驱动弹复性模块化机器人与第二欠驱动弹复性模块化机器人的无连接,通过上述方式,不仅可以实现两个欠驱动弹复性模块化机器人之间的连接方式(转动连接或固定连接)的切换,当存在欠驱动弹复性模块化复合型机器人中的欠驱动弹复性模块化机器人损坏时,还能够解除两个欠驱动弹复性模块化机器人之间的固定连接,将两个欠驱动弹复性模块化机器人进行分离,以便于能够自主对损坏的欠驱动弹复性模块化机器人进行更换。
- 还没有人留言评论。精彩留言会获得点赞!