工业机器人机械臂的制作方法
本发明涉及工业机器人机械臂,更具体地说,本发明涉及工业机器人机械臂。
背景技术:
1、工业机械臂是拟人手臂、手腕和手功能的机械电子装置,它可把任一物件或工具按空间位姿的时变要求进行移动,从而完成某一工业生产的作业要求,如夹持焊钳或焊枪进行点焊或弧焊、搬运压铸或冲压成型的零件或构件、进行激光切割、喷涂、装配机械零部件等等。
2、工业机器人在使用时,其机械臂会在电机带动下不断旋转,所以在长期使用后,需要工作人员对电机和机械臂的连接位置定期进行润滑养护,而按传统润滑养护的方式,工作人员需要将装置拆卸开,然后添加润滑油或者润滑脂等,但该方式存在操作繁琐、养护时间比较长的不足。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明的实施例提供工业机器人机械臂,以解决上述背景技术中提出的问题。
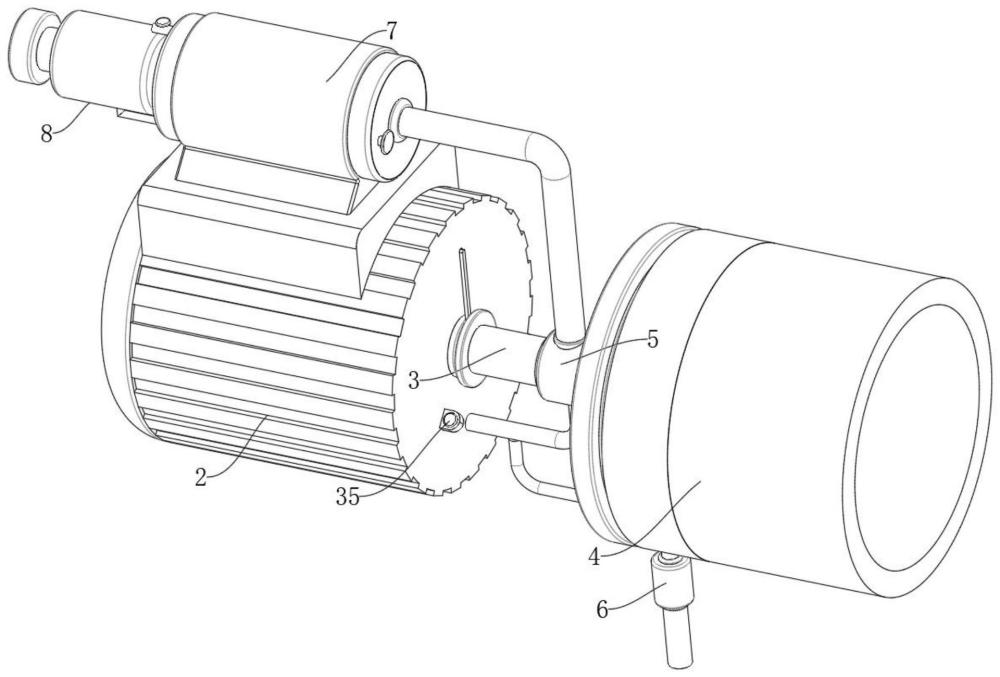
2、为实现上述目的,本发明提供如下技术方案:工业机器人机械臂,包括有用于构成旋转关节的两个机械旋转臂,一机械旋转臂内安装有电机,电机的输出轴驱使另一机械旋转臂做旋转运动;
3、所述电机的输出轴上固定连接着密闭的空心转筒,所述空心转筒上可旋转地安装有用于向空心转筒内注入润滑油的注入组件;
4、所述空心转筒的另一端端部固定连接有一齿轮,该齿轮的圆周方向侧壁上开设有若干个与空心转筒内腔相连通的注孔;
5、还包括有一固定连接着所述另一机械旋转臂的支撑环,该支撑环另一端端部同轴固定连接有与齿轮啮合传动的齿环,所述主孔位于齿轮与齿环之间。
6、本发明的技术效果和优点:在使用过程中,能够定量地直接向构成旋转关节的机械旋转臂的连接处注入润滑油,无需拆解设备,避免工作人员繁琐操作;并且采用本装置即使在机械臂作业过程中也能够持续进行注油润滑;而且空心转筒、齿轮、齿环、支撑环共同构成了一个整体技术特征,利用该整体技术特征在用于连接两个机械旋转臂的同时,利用空心转筒的空心设计和齿轮上的注孔设计实现了润滑油的可持续注入,且润滑油的注入位置位于齿轮与齿环之间,直接注入到啮合传动工位处,提高润滑效果。
技术特征:
1.工业机器人机械臂,包括有用于构成旋转关节的两个机械旋转臂,一机械旋转臂内安装有电机(2),电机(2)的输出轴驱使另一机械旋转臂做旋转运动,其特征在于:
2.根据权利要求1所述的工业机器人机械臂,其特征在于:所述空心转筒(31)上设有两个相对称的第一缺口(32);
3.根据权利要求1所述的工业机器人机械臂,其特征在于:所述支撑环(43)内部固定有封闭板(44),该封闭板(44)使得齿轮(41)与齿环(42)啮合的运转空间与支撑环(43)的内腔分割开。
4.根据权利要求3所述的工业机器人机械臂,其特征在于:所述齿环(42)远离封闭板(44)的一端端部固定套接有收集套筒(61),该收集套筒(61)与齿环(42)、封闭板(44)共同合围出密闭的所述运转空间;
5.根据权利要求4所述的工业机器人机械臂,其特征在于:所述输出管(64)的输出端连接有第一过滤件(65),所述第一过滤件(65)的输出端固定连接有排出管(66),且排出管(66)的一端和润滑油回收源相连接。
6.根据权利要求5所述的工业机器人机械臂,其特征在于:所述第一过滤件(65)包括两端分别与输出管(64)、排出管(66)螺纹连接的过滤筒(651),所述过滤筒(651)的内侧壁上固定连接有菱形过滤件(652),所述菱形过滤件(652)的两个上侧面设有多个第一过滤孔(653),所述菱形过滤件(652)的两个下侧面设有多个第二过滤孔(654),所述第一过滤孔(653)的直径大于第二过滤孔(654)。
技术总结
本发明公开了工业机器人机械臂,包括有用于构成旋转关节的两个机械旋转臂,一机械旋转臂内安装有电机,电机的输出轴驱使另一机械旋转臂做旋转运动;电机的输出轴上固定连接着密闭的空心转筒,空心转筒上可旋转地安装有用于向空心转筒内注入润滑油的注入组件;空心转筒的另一端端部固定连接有一齿轮,该齿轮的圆周方向侧壁上开设有若干个与空心转筒内腔相连通的注孔;还包括有一固定连接着所述另一机械旋转臂的支撑环,该支撑环另一端端部同轴固定连接有与齿轮啮合传动的齿环,所述主孔位于齿轮与齿环之间。本发明无需拆解设备,即可向机械旋转臂的连接处注入润滑油,避免工作人员繁琐操作。
技术研发人员:秦衡波,周亮亮,周伟
受保护的技术使用者:东莞市理想智能装备有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!