一种输煤皮带轨道巡检机器人及巡检方法与流程
本发明属于机器人,具体涉及一种输煤皮带轨道巡检机器人及巡检方法。
背景技术:
1、电力行业属国民经济的基础产业,其发展水平直接关系国计民生。输煤皮带在煤炭生产、火力发电、钢铁制造及其他工业生产中有着广泛的应用,相对于其他运输设备,输煤皮带具有结构简单、稳定性高、运输量大、维护方便等优点,是工业生产过程中的重要设备。其中,火力发电厂输煤系统区域运行管理是一项复杂的系统性问题,随着输煤皮带传输距离的加长,传输容量的增大和传输速度的提高,输煤皮带在运行过程中存在的跑偏、堆料、撒料、撕裂、打滑、轴承异常、异物掉落、输煤设备故障、局部区域温度过高等问题日益凸显,稍有疏忽,潜在的隐患就会转换为安全事故,影响电力企业的生产安全。
2、火力发电厂大量的煤堆放在室内外仓库,但煤炭是易燃物品,煤炭在经过长时间的运输及存储之后,由于水分的挥发、压实程度的变化等因素影响变得更加危险。自燃可能发生在任何堆煤或输煤的地方,在输煤传送带系统上发生的概率更高。煤炭与空气中的氧气发生氧化,引起温度升高,如果没有监测系统在其上升到400摄氏度时无法察觉,则极易引发火灾。这样不仅对工作人员安全造成威胁,还可能对运行皮带造成损坏,甚至造成更大面积的损失,发电完全中断等。在这些预氧化过程中,还会产生大量的甲烷和一氧化碳气体,这些有毒气体让灭火变得更加艰难。
3、现有技术cn114367997a公开了一种皮带间智能巡检机器人,其承载平台上安装有承重机构和驱动机构,还包括感知设备俯仰角度调整机构和清扫机构,对驱动机构的主动轮驱动单元和张紧轮张紧单元也提出了新的结构方案。本发明结构简洁,性能可靠,空间利用率高,提高了对应用场景中轨道坡度一致性和平稳性的冗余度,也足以应对现场环境灰尘量较大的应用场景。但该现有技术的驱动机构仍然较为复杂,且清扫功能存在死角的缺陷;
4、现有技术cn117021139a公开了一种挂轨式输煤巡检机器人,包括机器人组件、清理组件、粉碎组件、调节导向组件和轨道,所述清理组件、粉碎组件和调节导向组件均设置于机器人组件的上方,所述清理组件包括打磨刷、旋转清洁刷和清洁电机,所述打磨刷包括刷体外壳,所述刷体外壳上设置有滑杆,通过清理组件和粉碎组件之间相互配合,针对不同的情况对轨道上的煤灰或煤渣进行清理,从而保证机器人组件正常运行,但该现有技术装置较为复杂,清扫装置不能实现不同角度的调节;
5、现有技术cn217669431u公开一种输煤廊道挂轨式智能巡检机器人,包括吊挂轨道、吊挂在吊挂轨道上的挂轨驱动模块及连接在挂轨驱动模块下方的智能主体模块和云台模块,挂轨驱动模块包括供智能主体模块和云台模块安装连接的挂架和设置在挂架上的挂轨驱动机构,挂轨驱动机构为沿吊挂轨道行进方向前后间隔开设置的至少两组,各组挂轨驱动机构分别可转动的安装连接在挂架上,并且各组挂轨驱动机构具有独立驱动结构吊挂在吊挂轨道上,但该现有技术装置较为复杂,还缺少清扫功能;
6、现有技术de202023103646u1公开了一种巡检机器人,但该现有技术的功能较为单一;
7、现有技术us2021031359a1公开了一种巡检机器人,但该现有技术的功能较为单一,且装置结构较为复杂;
8、现有技术公开了wo2022011781a1公开了一种巡检机器人,但该现有技术的功能较为单一,且装置结构较为复杂;
9、近年来,各大发电集团先后对占火电厂70%以上成本的燃料业务进行了全面深入的信息化、自动化、智能化建设并取得了良好的使用效果。但是,输煤栈桥的巡检工作作为燃料输送线业务的重要部分,劳动任务繁重,条件环境恶劣,目前仍然采用传统的人工作业方式,存在效率低,及时性、安全性差,可靠性、稳定性弱,误报、漏报现象时有发生,视频监视大量盲区,无法及时快速追踪现场情况等诸多问题。且落煤区粉尘量极高,对相关设备影响大,经常出现报警情况。
技术实现思路
1、综上,目前现有技术存在装置较为复杂,清扫存在死角的技术问题。而申请人经过研究,拟在上述现有技术的基础上,采用对称布置行走轮,但采用一个驱动轮驱动的方式,来简化驱动装置的结构,从而降低成本,并利用轴向偏转的方式从而实现清扫功能的改进。
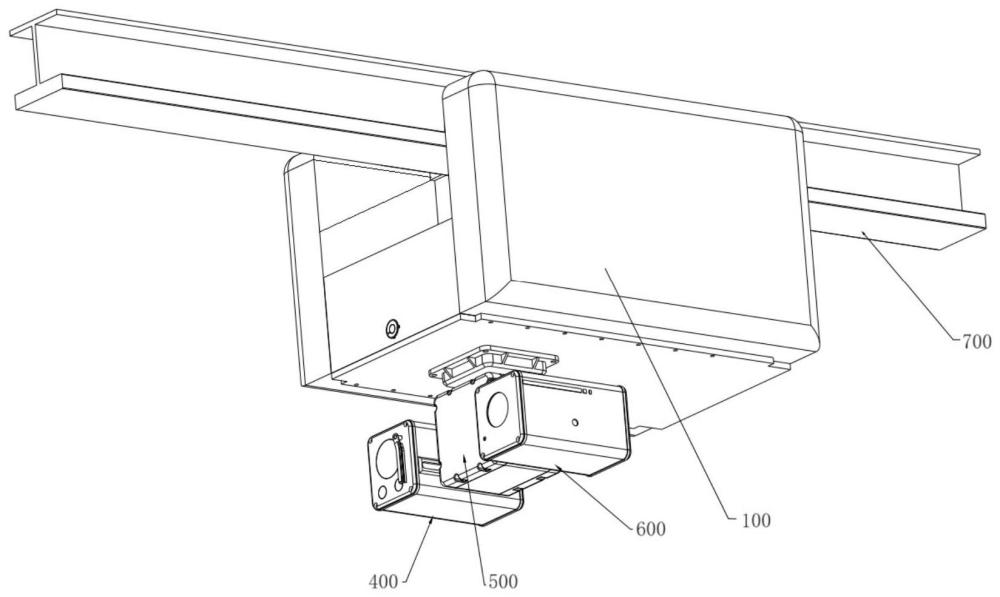
2、为此,本发明提供了一种输煤皮带轨道巡检机器人,其改进之处在于,所述巡检机器人包括机器人主体100,设置在机器人主体100内部的驱动装置200和轨道清扫装置300,设置在机器人主体100下部的控制平台500、图像采集装置400和红外热像仪600;
3、所述驱动装置200和轨道清扫装置300分别固定在机器人主体100内的前后侧,所述驱动装置200带动机器人主体100在轨道700上前后移动实现巡检功能;
4、所述图像采集装置400和红外热像仪600用于对输煤皮带进行视频监控和识别,并将结果发送至控制平台500中,由控制平台500下发控制命令。
5、进一步地,所述驱动装置200包括行走驱动电机1、电机架2、第一弹性垫3、第二弹性垫4、输出轴5、小皮带轮6、皮带7、大皮带轮8、蜗杆9、蜗轮10、行走轮11和支架12;所述行走驱动电机1通过电机架2连接在机壳的内壁,电机架2与机壳内壁之间设置第一弹性垫3,驱动电机1与电机架2之间设置第二弹性垫4;第一弹性垫3和第二弹性垫4均用于隔振;所述行走驱动电机1的输出轴5与小皮带轮6同轴连接,带动小皮带轮6转动,小皮带轮6通过皮带7带动大皮带轮8转动;所述大皮带轮8与蜗杆9同轴连接,蜗杆9与蜗轮10啮合连接,所述行走轮11与蜗轮10同轴连接。
6、进一步地,所述蜗杆9和蜗轮10均通过轴承架设在支架12内,所述支架12固定在机壳内壁通过蜗轮蜗杆啮合传动。
7、进一步地,所述轨道清扫装置300包括第一毛刷盘21、第二毛刷盘22、轨道清扫部机壳23、第一上凹槽24、第一连接块25、第一侧凹槽26、第二连接块27、螺纹孔28、螺杆29、旋转旋钮30、第二上凹槽31、第三连接块32、第四连接块33、腰型孔34、固定螺钉35、连接臂36、枢轴37、第二侧凹槽38、第三侧凹槽39和弹簧40;所述第一毛刷盘和第二毛刷盘上分别套装有毛刷轮(图中未示出,但本领域技术人员可以明了)。
8、所述第一毛刷盘21和第二毛刷盘22探出轨道清扫部机壳23,并且第一毛刷盘21和第二毛刷盘22分别位于轨道的两侧;
9、所述第一毛刷盘21的转轴位于轨道清扫部机壳23内的下端放置在第一上凹槽24内,第一连接块25的上表面设置第一上凹槽24,第一毛刷盘21的转轴的下端在第一上凹槽24内可以绕其轴线自由转动;所述第一连接块25上设有竖直方向的通孔,通过通孔第一连接块25与滑轨41形成滑动连接;所述第一连接块25的第一侧立面设置第一侧凹槽26,第一侧凹槽26内设置第二连接块27,第二连接块27上还设置有螺纹孔28,螺纹孔28的轴线与第一毛刷盘21的转轴平行;所述第二连接块27通过螺纹孔28与螺杆29连接,螺杆29向上伸出轨道清扫部机壳23的一端连接旋钮30,通过旋转旋钮30实现调整第一毛刷盘21的高度;
10、所述滑轨41的上下端连接在轨道清扫部机壳23的内壁上,螺杆29穿设于轨道清扫部机壳23;
11、所述第二毛刷盘22的转轴位于轨道清扫部机壳23内的下端放置在第二上凹槽31内,第三连接块32的上表面设置第二上凹槽31,第三连接块32的下端与第四连接块33连接;在第四连接块上设置长度方向竖直的腰型孔34,固定螺钉35穿设于腰型孔34,通过改变固定螺钉35的紧固位置调整第三连接块32相对于第四连接块33在竖直方向上的位置;
12、所述第一连接块25的第二侧立面向外延伸出连接臂36,第四连接块33通过枢轴37与连接臂36连接,所述第四连接块33可绕枢轴37转动,允许其与第一连接块25之间的夹角可变。
13、进一步地,所述第一连接块25的第二侧立面上设置第二侧凹槽38,在第四连接块33的侧立面设置第三侧凹槽39,设置弹簧40、一端位于第二侧凹槽38内、另一端位于第三侧凹槽39内,所述弹簧40承受第四连接块33的压力处于压缩状态,其恢复力推动第二毛刷盘22向轨道靠拢,保证清扫效果。
14、进一步地,所述轨道700包括上凸起部和下凸起部,中间形成有轨道槽,巡检机器人机器人主体100悬挂在左右两侧的轨道槽中。
15、进一步地,所述小皮带轮6的直径小于大皮带轮8,实现第一级减速;所述蜗杆9的直径小于与蜗轮10的直径实现第二级减速,同时蜗轮1的转轴与蜗杆9的轴线垂直并交错,实现转动方向的垂直转向。
16、本发明还提供一种输煤皮带轨道巡检方法,其改进之处在于,所述方法包括
17、(1)巡检机器人控制平台对图像采集装置和红外热像仪进行初始化;
18、(2)巡检机器人控制平台发送采集数据请求信号;
19、(3)图像采集装置和红外热像仪进行数据采集并将采集数据实时发送至控制平台;
20、(4)控制平台将采集数据与预设阈值进行比对,根据比对结果控制输煤皮带的启停。
21、进一步地,所述巡检机器人控制平台同步将比对结果同步至后台控制中心,后台控制中心根据实际情况向管理员推送异常信息。
22、进一步地,所述方法还包括控制平台对巡检机器人位置进行精确测量和控制,检测巡检机器人实际滚动的距离,计算巡检机器人所在的位置,并将信息及时反馈至后台控制中心。
23、有益效果:
24、本发明提供的巡检机器人能够实现在轨道上的前后移动,且巡检机器人的配制有轨道清扫装置,能够实时清扫轨道,避免环境内的粉尘烟尘存留在轨道上,影响巡检机器人的正常行进,且能够避免轨道上的烟尘掉落在后方的驱动装置上。通过控制平台能够实现机器人位置的精确测量、控制和实时监控,当出现问题时,巡检机器人实现自动启停,报警并通知后台管理员进行修整,提高生产效率,降低生产过程中的不必要损失。
25、本发明巡检机器人可实时检测参数,可检测出输煤栈桥区域温度过高、输煤皮带底部煤粉过量堆积、异物掉落、输煤设备异常等故障,提高了输煤皮带运行的安全性。
26、应了解的是,上述一般描述及以下具体实施方式仅为示例性及阐释性的,其并不能限制本技术所欲主张的范围。
- 还没有人留言评论。精彩留言会获得点赞!